基于Android系統(tǒng)的蔬菜智能耕作裝置設計與試驗
2018-08-31 09:17:32姬江濤李明勇趙凱旋吳靄玲孫經緯
農業(yè)機械學報 2018年8期
關鍵詞:功能
姬江濤 李明勇 金 鑫 趙凱旋 吳靄玲 孫經緯
(1.河南科技大學農業(yè)裝備工程學院, 洛陽 471003; 2.機械裝備先進制造河南省協(xié)同創(chuàng)新中心, 洛陽 471003)
0 引言
蔬菜生產全程機械化是指以機械化裝備代替人力勞作,并應用智能化、信息化技術參與蔬菜的種植、管理以及收獲等過程[1-5],相較于傳統(tǒng)種植方式,具有農藝標準實現程度好、資源利用率高的優(yōu)點,已成為蔬菜生產領域的研究熱點。目前,蔬菜生產過程主要由農業(yè)機械、設施農業(yè)裝備與人力勞作結合的生產方式進行,具有機械設備結構復雜、耕作方式粗獷、生產智能化程度低、耗費人力等缺點[3,5]。因此,提高蔬菜生產全程機械化水平,研究蔬菜生產智能化、自動化技術及集成裝置應用意義重大。
針對蔬菜生產全程機械化智能程度低、耗費人力等問題,相關人員開展了一些有益研究。如馬浚誠等[6]研發(fā)了一套葉類蔬菜病害識別的溫室監(jiān)控視頻采集系統(tǒng),滿足了溫室葉類蔬菜病害識別的視頻數據需求。馬正華等[7]針對蔬菜工廠種植環(huán)境要求苛刻的問題,設計了一款基于無線傳感網絡的蔬菜工廠智能監(jiān)控系統(tǒng),可為蔬菜工廠智能化生產提供技術支撐。李鑫星等[8]設計了面向移動視頻獲取的網絡互通網關,最終實現蔬菜病蟲害視頻的移動獲取。溫皓杰等[9]以蔬菜病害知識視頻為對象,構建了面向語義挖掘的語義場景檢測模型,實現蔬菜病害視頻語義檢測。付煥森等[10]利用PLC的PID調節(jié)模塊,引入模糊控制理論以及組態(tài)技術,設計智能專家蔬菜大棚種植系統(tǒng),實現了蔬菜智能種植。孔國利等[11]采用遠距離無線串口透傳技術設計了蔬菜大棚溫濕度和土壤水分自動化智能管理系統(tǒng),可節(jié)省蔬菜生產過程人工成本。高峰等[12]設計了基于無線傳感器網絡的作物水分狀況檢測系統(tǒng),可全面對作物環(huán)境因素進行監(jiān)測與控制,自動管理作物所需的濕度、溫度、肥料等信息。已有文獻中,大多是對蔬菜生產裝備的智能化檢測與控制技術[6,11,15]以及設施農業(yè)中蔬菜生長信息的獲取技術的研究[10-14],對于蔬菜耕作遠程控制、智能化生產及自動化管理技術的集成與創(chuàng)新應用研究較少。
為實現蔬菜生產智能化、自動化的目標,本文集機械設計、壓力傳感、無線傳輸、互聯(lián)網通信及Android終端控制等技術,設計蔬菜智能耕作裝置,該裝置可通過無線模塊實現硬件聯(lián)網功能,用戶可通過Android客戶端監(jiān)測作物圖像及耕作參數信息,通過指令遠程操控耕作裝置進行播種、澆水以及施肥操作,實現蔬菜遠程耕種及管理等生產過程,為蔬菜智能生產裝備的設計提供參考。
1 系統(tǒng)設計
蔬菜智能耕作裝置的系統(tǒng)設計主要包括機械結構設計及控制系統(tǒng)設計,機械結構部分主要包括裝置功能部件設計、機械結構安裝,控制系統(tǒng)設計主要包括系統(tǒng)硬件通信設計、軟件系統(tǒng)設計。
1.1 結構設計
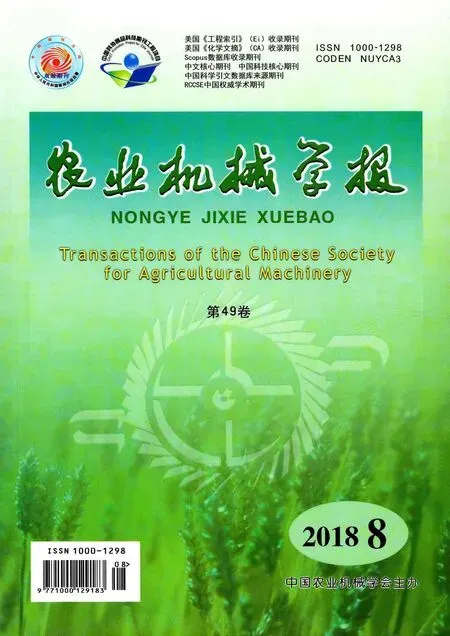
蔬菜智能耕作裝置機械結構部分包括龍門架定位機構、底架導軌、機械臂、末端執(zhí)行器及土槽,末端執(zhí)行器通過龍門架、機械臂及底架導軌實現在土槽耕作區(qū)域的X、Y、Z三軸定位操作,完成相應的耕作功能。為了使耕作裝置便于安裝及裝置輕量化,裝置結構體使用鋁型材構建,底架導軌安裝于土槽兩側,加固箱體同時引導龍門架機構對土槽內耕作區(qū)域進行株距定位(X軸移動)操作;龍門架垂直安裝于導軌上方,機械臂通過十字滑塊機構安裝于龍門橫梁上,便于實現機械臂對耕作區(qū)域的行距定位(Y軸移動)操作;機械臂由絲杠、鋁型材組合而成,絲杠與滑塊配合,步進電動機通過聯(lián)軸器和絲杠連接,驅動安裝于機械臂底部的末端執(zhí)行器上下移動,實現末端執(zhí)行器的栽深控制(Z軸移動);為了便于實現耕作功能一體化,末端執(zhí)行器采用公母頭設計,由工具頭(母頭)安裝在機械臂末端,配合功能部件(公頭)使用,功能部件(公頭)包括播種功能部件、液態(tài)物料投放功能部件以及土壤信息監(jiān)測功能部件;土槽為耕作操作區(qū)域,為了降低裝置質量便于搬運及更換,土槽箱體選用木制材料拼接而成;箱體內外表面都進行了防腐蝕及密封處理,防止箱體腐蝕損壞以及土壤營養(yǎng)成分流失。蔬菜智能耕作裝置機械結構如圖1所示。
1.2 控制系統(tǒng)工作原理
控制系統(tǒng)主要由數據通信模塊、Android手機控制終端、耕作執(zhí)行模塊及圖像識別模塊組成,圖2為智能耕作裝置控制系統(tǒng)原理圖。
1.2.1硬件系統(tǒng)通信原理
為使耕作操作更加智能與簡便,該裝置采用互聯(lián)網通信方式實現Android端遠程指令操作及工作狀態(tài)監(jiān)測功能。云端服務器創(chuàng)建一個SeverSocket通信實例,指定監(jiān)聽端口,實現智能耕作裝置硬件與Android手機客戶端的智能交互。Android手機客戶端與智能耕作裝置硬件通過Socket與服務器建立長連接,服務器對手機客戶端指令存儲并轉發(fā)至硬件系統(tǒng),實現手機對硬件的控制;硬件系統(tǒng)可以實時發(fā)送狀態(tài)信息給服務器,云端服務器存儲并轉發(fā)狀態(tài)信息至手機,實現手機端對硬件系統(tǒng)的實時監(jiān)測。
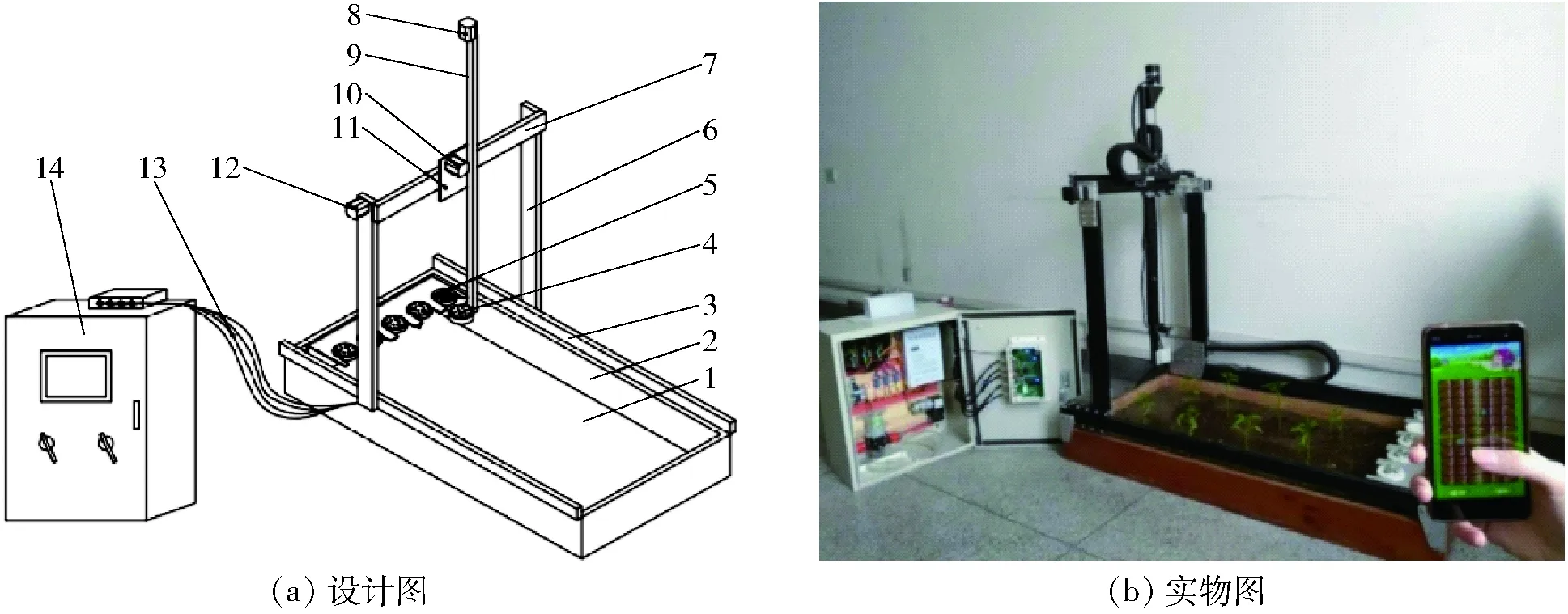
圖1 機械結構圖 Fig.1 Mechanical structure diagrams 1.土槽 2.箱體 3.底座導軌 4.工具頭 5.工具頭托盤 6.龍門柱 7.龍門梁 8.Z軸電動機 9.Z軸型材 10.X軸電動機 11.十字滑塊 12.Y軸電動機 13.信號電纜線 14.控制柜
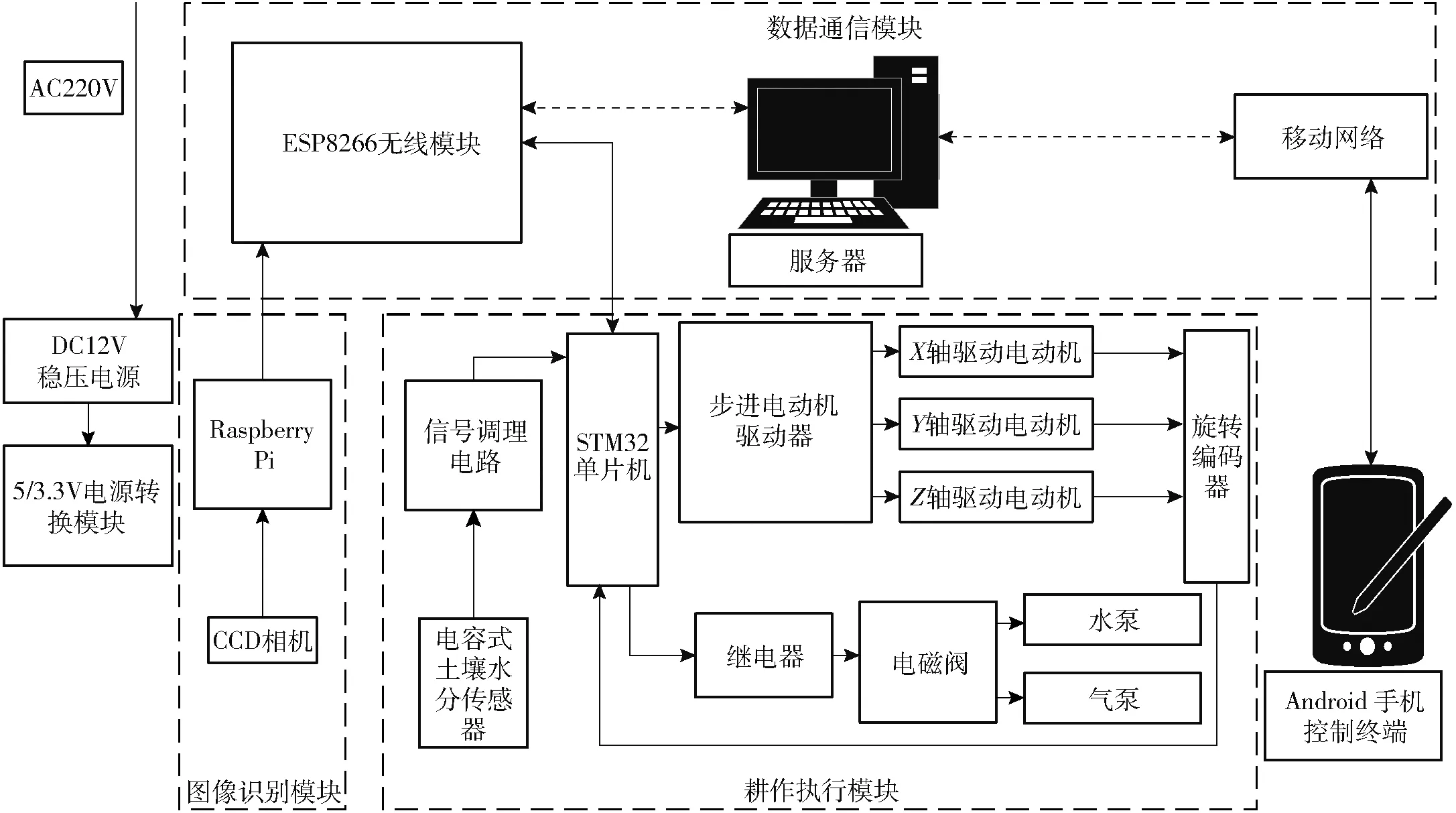
圖2 智能耕作裝置控制系統(tǒng)原理圖 Fig.2 System schematic diagram
1.2.2軟件系統(tǒng)
Android手機端將耕作指令通過互聯(lián)網發(fā)送至服務器,服務器經過運算處理后將動作指令信息發(fā)送至無線模塊,無線模塊將耕作動作指令傳輸給耕作執(zhí)行模塊;耕作執(zhí)行模塊包括X軸驅動電動機(驅動龍門柱前后移動)、Y軸驅動電動機(驅動機械臂在龍門梁上移動)和Z軸驅動電動機(驅動機械臂上下移動);電動機采用雷賽42HS03-JG-B型步進電動機,保持轉矩0.34 N·m,轉動慣量0.082 kg·cm2,經計算驅動耕作裝置所需轉矩大于0.28 N·m,該型號電動機參數完全滿足裝置運動部件驅動要求;利用光電旋轉編碼器對電動機驅動行程進行檢測,并反饋至控制器,對龍門架機構及機械臂運動行程進行控制,提高機構運動的精確性;光電旋轉編碼器通過聯(lián)軸器與步進電動機轉軸連接,對步進電動機運轉步數進行編碼,并將步數信息反饋至控制器,實現對步進電動機的閉環(huán)控制,提高控制精度及穩(wěn)定性。圖像識別模塊包括CCD相機,焦距為6.8 mm。CCD相機安裝在末端執(zhí)行器上方5 cm處,鏡頭與末端執(zhí)行器平行安裝,便于作物圖像信息采集。處理器選用Raspberry Pi,Raspberry Pi包含片上Soc,集成了CPU和GPU功能,支持USB接口、I/O接口;CCD相機通過USB與Raspberry Pi相連接,圖像處理后,將作物信息通過網絡服務器傳輸到Android控制終端。
1.3 電源及驅動設備
系統(tǒng)輸入電源為交流220 V電源,電源電路包含控制器電路及執(zhí)行器件電路。電源適配器選用順祥S-400-12型,輸入:100~110 V/6.5 A(200~230 V/4 A),輸出:12 V/33 A最大,具有過壓保護、過載保護及短路保護功能,通過電源適配器將220 V交流電轉換為12 V穩(wěn)壓直流電輸入到系統(tǒng)電源電路。通過系統(tǒng)電源電路分別輸出5 V及3.3 V為控制器供電,控制器電路輸入電壓為3.3 V,主要包含STM32單片機、ESP8266無線模塊以及相關外設電路元器件;執(zhí)行器件電路輸入電壓為12 V,執(zhí)行器件電源電路主要包含電磁閥、繼電器、氣泵、水泵、步進電動機驅動器以及步進電動機。
1.4 控制硬件組成
控制硬件包括氣泵、水泵、控制器模塊以及互聯(lián)網通信模塊,系統(tǒng)控制柜結構圖如圖3所示。

圖3 控制柜結構圖 Fig.3 Diagram of control cabinet structure 1.電動機驅動器 2.繼電器 3.電磁閥 4.液路 5.水泵 6.氣路 7.空氣壓縮泵 8. DC12 V電源 9.ESP8266無線模塊 10. STM32單片機 11.通信電纜
為實現智能耕作裝置中X、Y、Z軸電動機驅動的邏輯控制,并接收X、Y、Z軸步進電動機位移量反饋信號,控制器模塊選用美國ST公司生產的STM32F103ZET6型單片機微控制器,ARM 32位內核,最高工作頻率72 MHz,3個12位A/D轉換器,112個快速I/O端口(包含雙向I/O端口),具有支持USART/SPI通信協(xié)議接口。
耕作裝置采集的耕作圖像信息通過圖像處理模塊處理后傳輸至Android手機終端,圖像處理模塊采用Raspberry Pi,64位處理器,運算速度1.2 GHz,包含40針GPIO口,4個USB端口,BCM43143 WiFi模塊;工作時通過WiFi模塊連接網絡,實現圖像數據傳輸,通過I/O口與控制器通信,并將識別信息的處理數據傳輸至控制器。
為實現智能耕作裝置硬件接入互聯(lián)網,選用樂鑫ESP8266型WiFi模塊為互聯(lián)網通信模塊,無線標準:802.11b/g/n,PCB板載天線,傳輸距離80 m,最大發(fā)射功率18.5 dBm,數據接口支持UART。該模塊外接單片機,使用AT命令操作,通過USART串口與單片機通信,完成現場控制系統(tǒng)與Android客戶端網絡通信相關任務。
水泵及氣泵組成了耕作執(zhí)行模塊中的動力單元。水泵選用藤原直流水泵,工作電壓DC 12 V,額定功率20 W,進出水口徑最大流量600~1 200 L/h;氣泵選用H12-85型活塞泵,工作電壓DC 12 V,額定功率23 W,真空度-85 kPa;水泵與氣泵工作時通過電源適配器提供12 V開關電源,由繼電器與控制器控制啟停狀態(tài)。
2 功能設計與實現
2.1 末端執(zhí)行部件設計
為實現末端執(zhí)行器集播種、澆水、施肥等功能于一體,采用公母頭耦合連接方式,利用3D打印技術設計了分離式末端執(zhí)行部件。如圖4所示,末端執(zhí)行部件包括工具頭和功能頭,工具頭為母頭設計,功能頭為公頭設計,插接頭前端均設置有強磁鐵螺帽,強磁鐵采用三角對稱布置,便于實現母頭與公頭插接方向的選擇,保證內部傳輸通路連接正確性;末端執(zhí)行部件內部包含傳感器接線端及電源接線端,實現傳感器供電及檢測的信號傳輸。
圖4 末端執(zhí)行部件設計及安裝 Fig.4 Sketches of end-effector component design and installation
末端執(zhí)行部件設計了氣、液通道,可根據耕作過程完成相應的氣、液傳輸功能。播種、澆水及施肥功能分別通過氣泵與水泵提供動力完成,氣、液通道采用彈性較好的軟質橡膠管道,防止管道堵塞,保障氣、液傳輸的穩(wěn)定性;氣、液管道接口選用錐形活塞接口設計,采用插接式連接方式,插接力由磁鐵間吸合力提供,吸合方式簡便,吸合力可使密封性好,保證氣、液通道傳輸功能的可靠性。
末端執(zhí)行部件通過工具頭組合不同的功能頭實現相應末端執(zhí)行器的功能,工具頭通過螺栓固接在Z軸機械臂上,通過不同功能頭與工具頭磁耦合連接,可形成執(zhí)行相應功能的末端執(zhí)行器,完成土壤水分監(jiān)測、定量播種、液態(tài)物料精量投放等功能。
2.2 土壤水分監(jiān)測
2.2.1土壤水分監(jiān)測功能頭設計
為實現智能耕作系統(tǒng)對作業(yè)區(qū)域土壤水分信息的獲取,輔助Android控制端作出耕作決策,設計了土壤水分監(jiān)測傳感器功能頭,如圖5所示。功能頭由圓形插接端、探針及PCB板載信號調理電路組成,其中探針為2個長條形印刷電路板,構成平行結構,兩探針電極長40 mm,寬6 mm,厚1.6 mm,探針間內側距離為5 mm;探針與圓形插接端構成一個整體,圓形插接端內部包含傳感器電子電路,并預留3根接線,包括電源端、信號端、地線端,通過與末端執(zhí)行器工具頭插接實現線路通信;為便于探針插入土壤,其末端設計為三角形,表面涂敷銅層形成電接觸區(qū),以感知待測區(qū)域土壤水分信息。
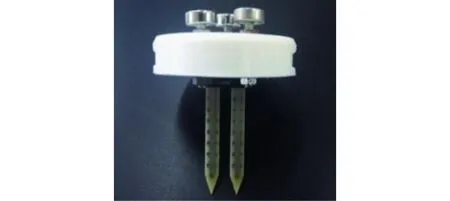
圖5 土壤水分監(jiān)測傳感器功能頭 Fig.5 Soil moisture monitoring sensor functional head
2.2.2土壤水分監(jiān)測原理
土壤是由顆粒固體、空氣和水組成的混合物,土壤的介電常數隨土壤含水率的變化而變化,土壤水分監(jiān)測是基于電容原理[16]。根據土壤水分監(jiān)測末端執(zhí)行器的兩探針插入含水率不同的土壤中,造成探針間電容變化并輸出變化量電信號,經過信號調理電路進行濾波及采樣保持后,通過測量電路檢測探針間電容變化量,以電容變化量并根據測量電路特性通過反演計算間接測得含水率。電容變化原理為
(1)
式中ε——介電常數
S——兩電容極板間正對面積,mm2
k——靜電力常量,N·m2/C2
d——兩電容極板間距離,mm
2.3 定位控制及定量播種
針對智能耕作裝置定量播種要求,采用3D打印技術設計了氣吸式播種功能頭,如圖6所示。該播種功能頭與機械臂端工具頭插接形成末端執(zhí)行器,通過龍門架機構移動實現播種區(qū)域定位,配合氣吸壓力監(jiān)控,實現定位定量播種操作。
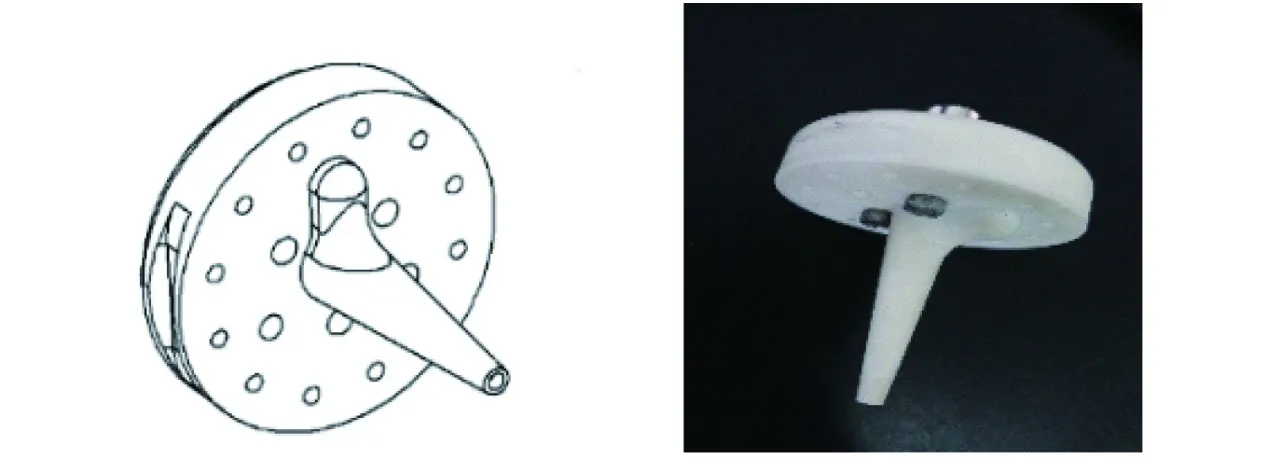
圖6 氣吸式播種功能頭 Fig.6 Air suction sowing functional head
2.3.1龍門架定位控制精度理論分析
龍門架定位移動控制系統(tǒng)采用帶位置反饋的閉環(huán)步進定位控制方式[17],由控制器設定的位置信息驅動步進電動機,并通過編碼器對位置信息進行反饋,指示控制器控制電動機啟停以達到閉環(huán)定位的目的。步進控制系統(tǒng)主要由STM32控制器、電動機驅動器、步進電動機及光電旋轉編碼器組成,控制系統(tǒng)結構框圖如圖7所示。
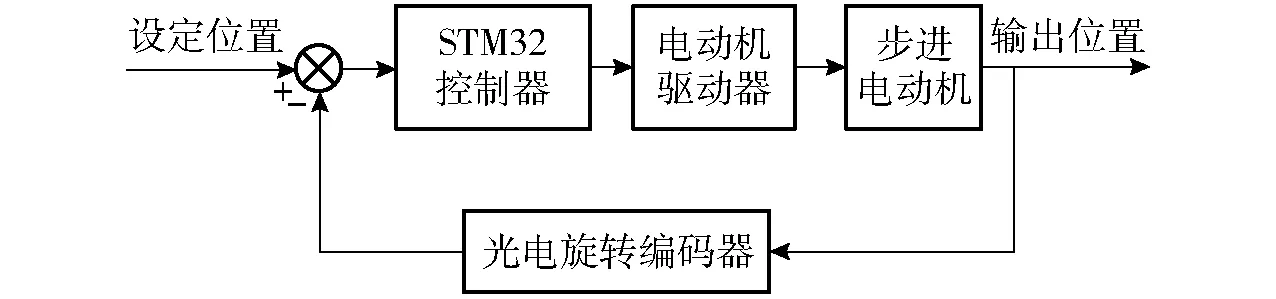
圖7 龍門架閉環(huán)控制系統(tǒng)框圖 Fig.7 Control system diagram
龍門架X、Y、Z軸由步進電動機驅動帶輪帶動傳動帶進行定位移動,通過歐姆龍E6B2-CWZ6C型光電旋轉編碼器(啟動轉矩不大于0.98 mN·m,最大分辨率2 000 P/R)對移動位置進行反饋。龍門架移動時,按照控制端給定的位置坐標,設定電動機驅動移動距離為X,則運轉步距角數量n為
(2)
式中r——帶輪半徑,7 mm
α——電動機步距角,1.8°
根據步進電動機的精度一般為步距角的3%~5%,得到步進電動機運轉的最大角度誤差為
Δβ=(Δn+0.05)α
(3)
式中 Δn——步距角數量計算取整誤差
由Δβ可得最大相對角度誤差E0為
(4)
其中
β=nα
式中β——電動機轉動角度
考慮到步進電動機等電氣元件實際工作情況,在智能耕作裝置設計中,允許龍門架定位移動誤差Δx為±0.05 cm,龍門架定位移動所允許的最大相對位置誤差E1為
(5)
式中Xmax——耕作裝置作業(yè)過程中龍門架移動最大距離,90 cm
代入式(5),得E1為0.055%。
由于龍門架移動距離與步進電動機轉動角度為正比例關系,因此步進電動機轉動所允許的最大相對角度誤差E2與最大相對位置誤差E1相等。
根據智能耕作裝置土壤箱體尺寸(長×寬×高為120 cm×70 cm×18 cm)及播種農藝行株距要求設定的龍門架移動常用驅動距離,得到電動機控制精度結果如表1所示。由表1可知,在電動機驅動距離為150~900 mm范圍內均滿足E2>E0,即電動機控制中允許的最大相對角度誤差大于最大相對角度誤差,故采用位置反饋的閉環(huán)控制可滿足耕作裝置定位控制要求。
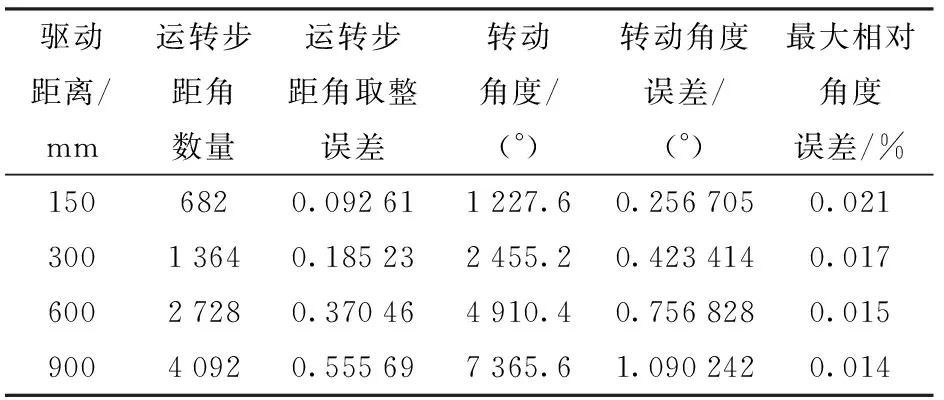
表1 電動機控制精度分析結果 Tab.1 Motor control accuracy analysis result
2.3.2氣吸式定量播種
為了實現單顆小粒種子定量播種,參考黃震宇等[18]對常見蔬菜作物種粒尺寸參數信息的統(tǒng)計研究,設計的播種功能頭吸嘴直徑為2 mm,與配置的H12-85型活塞泵配合使用時,可提供最大吸力為0.68 N,能夠滿足種粒單粒質量在0~50 g范圍內的種粒定量播種操作。
由Android控制端發(fā)送播種指令后,STM32控制器根據接收的坐標位置信息規(guī)劃龍門架機構移動路線,并控制氣泵啟動及電磁閥實現正負氣壓輸出切換,完成吸種及落種操作。將土槽耕作區(qū)域的面積及播種作物類別等參數輸入客戶端,由客戶端確定行株距等作物農藝信息并劃分耕作區(qū)域,生成播種穴坑位置坐標;裝置現場層控制器STM32接收到播種坐標信息后,指示X、Y、Z軸步進電動機聯(lián)合驅動,將末端執(zhí)行器定位到取種箱位置,控制器啟動氣泵輸出負壓進行吸種操作;取種完成后,由龍門架機構將末端執(zhí)行器定位到播種位置,控制器通過指示電磁閥切換氣壓輸出方向,完成落種。
2.4 液態(tài)物料精量投放
為實現澆水、施肥等液態(tài)物料精確投放,設計了液態(tài)物料投放功能頭,如圖8所示。液態(tài)物料投放功能頭通過與機械臂末端工具頭插接,形成液態(tài)物料投放末端執(zhí)行器。系統(tǒng)可根據Android控制端指令,指示STM32控制活塞泵啟動,完成液態(tài)物料輸送。為實現液態(tài)物料精量投放,在末端執(zhí)行器與橡膠管道接口處設置有PVDF貼片式壓力傳感器用于采集水壓及流量信息,并將水壓信息傳輸至控制器,由控制器子程序對水壓信息進行運算并結合水泵運行時間獲取流量信息,實現液態(tài)物料投放監(jiān)測。

圖8 液態(tài)物料投放功能頭 Fig.8 Liquid material delivery functional head
液態(tài)物料流量監(jiān)測選用美國精量公司(MEMS)生產的LDTM-028K型 PVDF壓力傳感器,精確度為1.4~16 V/g,輸出模擬量。為實現物料投放監(jiān)測,分別測試了液態(tài)物料正常投放時的壓力傳感器檢測輸出信號,投放堵塞時壓力傳感器檢測輸出信號,確定了信號調理電路中的壓力閾值;液態(tài)物料正常投放監(jiān)測時,PVDF傳感器輸出電壓閾值為4.7 V,液態(tài)物料投放堵塞時,輸出電壓閾值為7.2 V;利用AD模塊將電壓信號轉換為數字量并傳輸至水泵控制子程序,控制子程序對檢測信號進行解算,判斷堵塞信息,并控制水泵調節(jié)水壓,排除堵塞物(液態(tài)物料中混合堵塞物通常為未完全溶解的固態(tài)小顆粒物料,通過加壓噴出即可解除堵塞);通過對功能頭噴灑水壓監(jiān)測,水泵啟動采用定時器延時設計,通過對水壓及水泵運行時間控制進行液態(tài)物料流量監(jiān)測,實現液態(tài)物料精量投放。
2.5 圖像識別算法設計
基于BP人工神經網絡開發(fā)了雜草圖像識別算法,耕作裝置中種植圖像信息經CCD相機采集后,通過Raspberry Pi處理器進行圖像信息處理,判別雜草目標,并通過網絡服務器將雜草目標位置信息傳輸給Android控制終端,便于控制端選擇性投放除草劑,實現遠程管理。
為開發(fā)基于BP神經網絡的雜草識別算法,本文采集了23幅耕作裝置中生長的蔬菜與雜草圖像,圖像中包含的蔬菜品種為紫葉白菜,雜草品種為苣荬菜。采集的圖像中存在雜草與作物葉片殘缺、交叉遮擋等情況,對圖像特征進行人工分割,生成訓練集和測試集樣本。人工神經網絡的輸入特征共有5個,分別為每個像素點的R、G、B、G-R、G-B值,隱含層包含10個神經元,輸出層為2個神經元,輸出模式[0 1]表示非雜草,模式[1 0]表示為雜草。采用尺度共軛梯度反向傳播模式訓練神經網絡,能夠有效地降低訓練過程中的內存占用。訓練目標下降梯度為10-6,最大訓練步長為1 000次,驗證次數為6次。分別采用不同的訓練集、驗證集和測試集對模型進行訓練和測試。模型訓練完成后,將未知圖像的每一個像素點輸入模型,以得到雜草像素點識別結果,并對得到的十值圖像進行形態(tài)學處理,去除噪聲以及作物上的相似點,保留面積最大的連通區(qū)域,即為雜草識別與分割的最終結果,并將識別結果通過網絡服務器反饋至Android控制端,實現雜草的定位識別。
3 Android客戶端設計
為了實現智能耕作裝置遠程操作,通過ESP8266 WiFi模塊將智能耕作裝置接入互聯(lián)網,WiFi模塊與現場控制器STM32單片機串口連接,實現現場控制器與WiFi模塊通信,采用Smart Config模式配置智能耕作裝置硬件的網絡連接,由上位機設置路由SSID和密碼,并持續(xù)發(fā)送UDP廣播包,WiFi模塊在monitor模式下,接收并解析數據,獲取SSID及密碼并連接上無線路由器,實現智能耕作裝置與網絡交互。
基于Android平臺開發(fā)了移動客戶端軟件,軟件功能包括用戶登陸、種植參數選擇、耕作功能選擇,軟件界面如圖9所示。客戶端應用TCP/P協(xié)議連接網絡服務器,并通過服務器實現與智能耕作裝置硬件之間交互,實現遠程播種、澆水操作及耕作狀態(tài)圖像監(jiān)測[19-20],軟件流程圖如圖10所示。
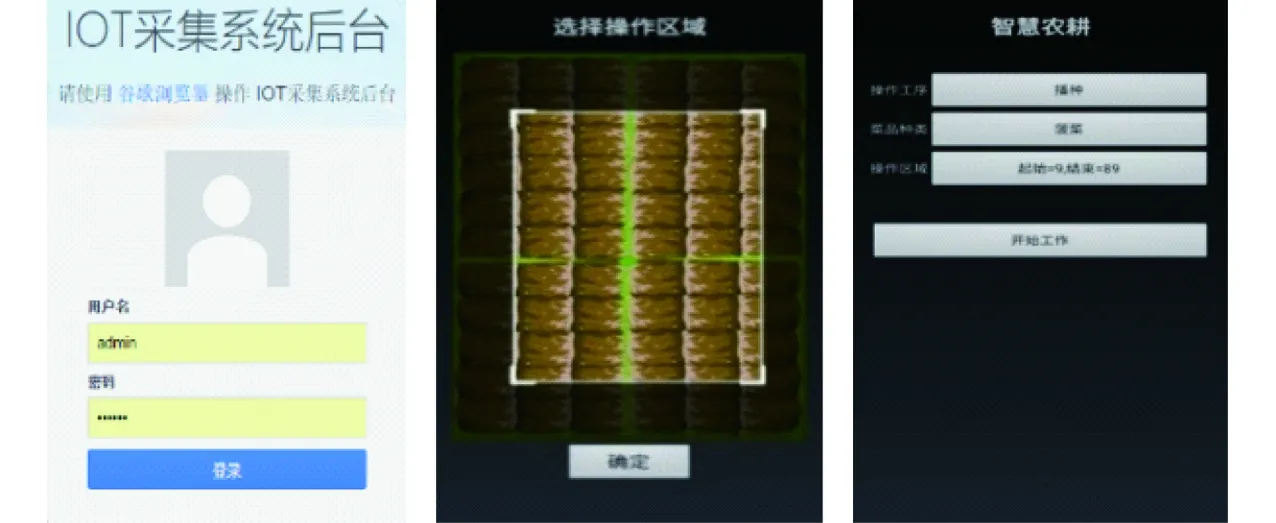
圖9 軟件界面 Fig.9 Software interface
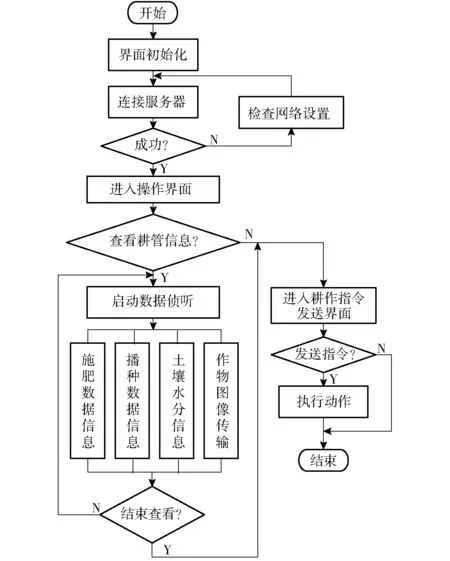
圖10 軟件流程圖 Fig.10 Software flow chart
4 試驗與結果分析
為驗證所設計的蔬菜智能耕作裝置功能是否可靠,進行了室內播種試驗及液態(tài)物料投放試驗,室內試驗場景如圖11所示。
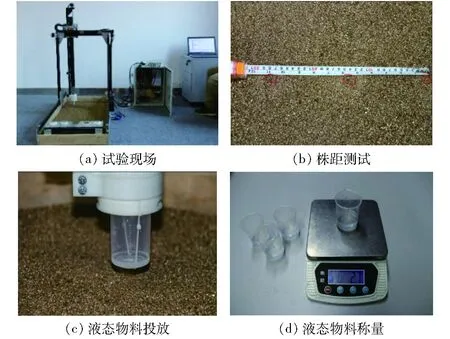
圖11 室內試驗場景 Fig.11 Scene of indoor test site
4.1 播種試驗
播種試驗旨在考察所設計的蔬菜智能耕作裝置播種功能及龍門架定位控制系統(tǒng)的穩(wěn)定性,驗證裝置播種定量與定位控制功能,以及播種末端執(zhí)行器內氣路通道傳輸的穩(wěn)定性。
4.1.1試驗材料及方法
播種試驗材料選用矮稈黃秋葵種子,外部形態(tài)呈顆粒狀,具體參數為:顆粒平均直徑4.23 mm,單粒平均質量0.01 g。播種株距為14~18 cm,行距為27~30 cm。
登陸Android客戶端后,選擇作物品種,由軟件程序確定播種坐標信息,確定矮稈黃秋葵種子播種行距為15 cm,株距為30 cm,通過客戶端選擇播種指令后,記錄軟件端顯示的標準播種行株距信息,播種動作執(zhí)行完成后,人工測量并記錄實際行株距以及穴坑中種粒數量。考慮實際播種過程存在偶然誤差情況,株距評判以標準株距誤差在±5 mm范圍內為合格,設計6組試驗,每組試驗重復進行2次。
4.1.2試驗指標
以株距合格率為指標考察智能耕作裝置定位播種的精確性,定義株距合格率為
(6)
式中H——合格株距種粒數
H0——總種粒數
以誤播率為指標考察播種末端執(zhí)行器工作的穩(wěn)定性及可靠性,定義誤播率為
(7)
式中N——誤播穴坑數,包括漏播及多播穴坑
N0——總播種穴坑數
4.1.3試驗結果
播種試驗結果如表2所示,株距合格數為滿足標準株距的種粒個數,誤播穴坑數包括穴坑漏播及穴坑內種粒數目大于1的穴坑數。
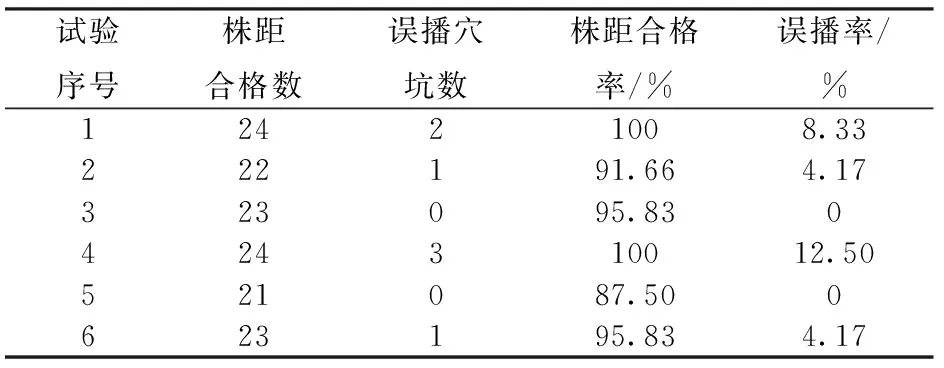
表2 播種試驗結果 Tab.2 Sowing test data
4.1.4結果分析與討論
由表2可知,該智能耕作裝置可實現播種功能,且播種作業(yè)效果較好,株距平均合格率可達95.13%,平均誤播率為4.86%,播種末端執(zhí)行器氣路通道插接密封性較好,提供的氣吸力可完成取種,試驗中觀察發(fā)現未出現穴坑漏播現象,試驗中誤播均為單個穴坑種粒多播。
根據對試驗過程觀察分析發(fā)現,造成播種效果不好的原因主要有:在播種過程中,末端執(zhí)行器吸嘴孔徑與種粒大小不匹配會導致單次取種過多,造成穴坑多播現象。在取種完成后,末端執(zhí)行器移動至穴坑定位位置過程中,機械臂出現輕微抖動,尤其是移動距離較遠時,龍門架驅動為先加速后減速驅動方式,整個移動過程平均速度增大,造成機械臂抖動加劇,導致投種時出現株距誤差。
針對上述問題,可考慮結合種粒尺寸對播種功能頭進行改進設計,根據農藝參數信息,定制播種功能頭以適應相應的種粒,減少穴坑多播現象,避免后期間苗,造成種粒浪費;改進步進電動機驅動算法,采用“加速-勻速-減速”驅動方式,減少機械臂定位移動過程中末端執(zhí)行器抖動,提高株距合格率。
4.2 液態(tài)物料投放試驗
4.2.1試驗方法與結果
液態(tài)物料投放試驗旨在考察耕作裝置定量澆水、施肥功能的可靠性,試驗材料選用貝靈牌高鉀型滴灌水溶肥(溶解前為固態(tài)顆粒狀,水不溶物含量不大于0.1%),試驗時室內溫度為25℃,設定試驗標準投放量為30 g,進行6組試驗,每組試驗重復12次進行,試驗投放位置隨機選擇。
以投放量準確率為指標考察物料投放功能的準確性,為了便于試驗測量,采用扎帶將大口徑量杯固定在投放功能頭的出料口,收集單次投放的液態(tài)物料并進行稱量統(tǒng)計,試驗結果如圖12所示。
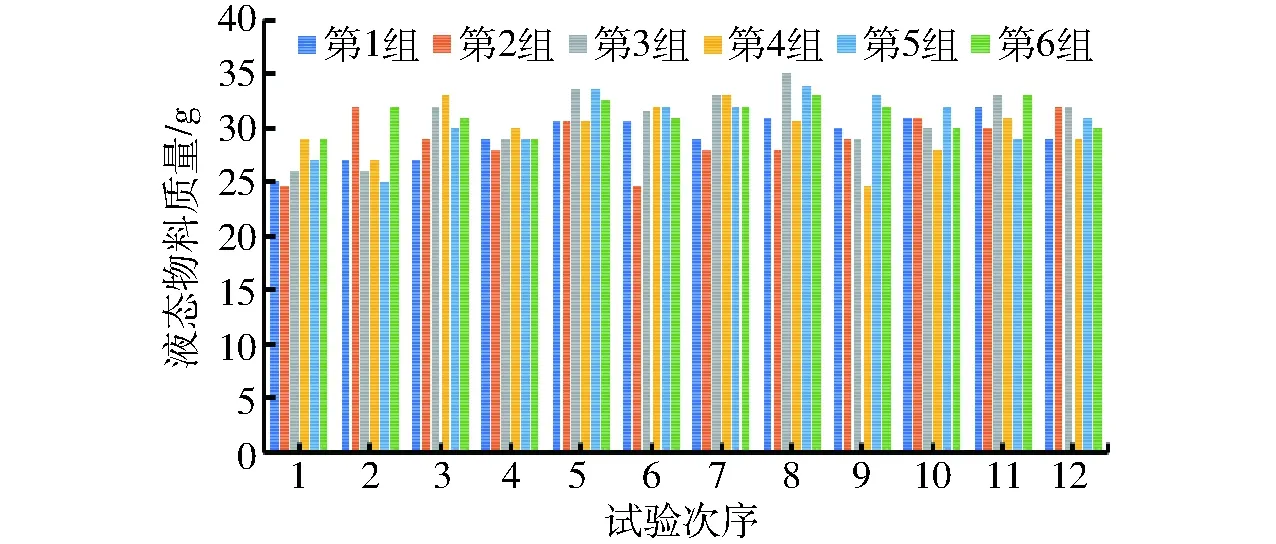
圖12 液態(tài)物料投放試驗結果 Fig.12 Liquid material delivery test result
4.2.2結果分析與討論
由圖12可看出,該裝置可實現液態(tài)物料精量投放功能,液態(tài)物料投放量數據波動較小,投放量波動范圍為24.6~35.1 g,最大誤差為5.4 g。
在試驗過程中發(fā)現,造成投放不均的原因主要為裝置在每組試驗的初次投放液態(tài)物料時,液路管道中混有空氣造成實際投放量偏小。液態(tài)物料投放口堵塞造成液態(tài)物料投放不均,第2組試驗中第6次投放和第4組試驗中第9次投放出現堵塞現象,水壓增加使液態(tài)物料投放功能頭噴出堵塞物時造成流量監(jiān)測誤差,導致投放量偏少。
對于上述問題,可考慮改進控制水泵啟動的定時器延時設計,并增加流量傳感器對液態(tài)物料噴灑過程及流量進行監(jiān)測,PVDF壓力傳感器檢測堵塞狀態(tài),根據堵塞傳感信號及流量傳感信號的融合設計水泵啟動決策控制算法,提高液態(tài)物料投放量精度。
5 結論
(1)集機械設計、壓力傳感、無線傳輸、互聯(lián)網通信及Android終端等技術,設計了蔬菜智能耕作裝置。設計了公母頭式耕作末端執(zhí)行部件,可通過磁耦合方式快速更換功能頭,進行氣、液傳輸及土壤水分監(jiān)測等的操作,基于Android平臺開發(fā)了移動客戶端軟件,可實現作物圖像監(jiān)測及遠程操控定量播種、液態(tài)物料精量投放等功能。
(2)試驗結果表明:該智能耕作裝置可實現定量播種功能,且播種作業(yè)效果較好,株距平均合格率可達95.13%,平均誤播率為4.86%;液態(tài)物料投放功能較為穩(wěn)定,且均勻性較好,液態(tài)物料投放量數據波動較小,投放量波動范圍為24.6~35.1 g,最大誤差為5.4 g;可為蔬菜智能化種植裝備設計提供參考。
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩詞(2022年6期)2022-12-31 06:41:24
當代陜西(2021年21期)2022-01-19 02:00:26
中學生數理化(高中版.高考數學)(2020年1期)2020-02-20 13:23:44
經濟技術協(xié)作信息(2018年11期)2019-01-14 03:07:20
中國科技論壇(2017年7期)2017-07-25 08:49:53
制造技術與機床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫(yī)藥現代遠程教育(2014年22期)2014-03-01 04:32:55