濾波融合算法的管道鋼珠運動檢測系統設計
2018-09-07 02:31:52
單片機與嵌入式系統應用
2018年9期
(重慶城市職業學院 信息工程系,重慶 402160)
引 言
管道運動鋼珠檢測系統屬于球桿系統的一種,它是一個多變量、強耦合、非線性、時變和自然不穩定系統,是近年來研究平衡桿及擺動控制問題的又一研究平臺,是檢驗各種控制理論的典型模型。仿人智能控制(Human-Simulated Intelligent Control)理論從分層遞階智能控制系統的最低層(運行控制級)著手,根據被控對象變化的大小、方向及速率等動態特征,充分運用已有的智能裝備技術和控制技術,模仿人腦的智能識別、智能決策,并將其編制成各種簡單實用、精度高、能實時運行的控制算法即動覺智能圖式[1],直接應用于實際控制系統。本文依據動覺智能圖式的仿人智能控制理論實現管道鋼珠的運行檢測,對管道運行角度和角速度提出了融合算法,得到了較為理想的檢測效果。
1 系統總體設計
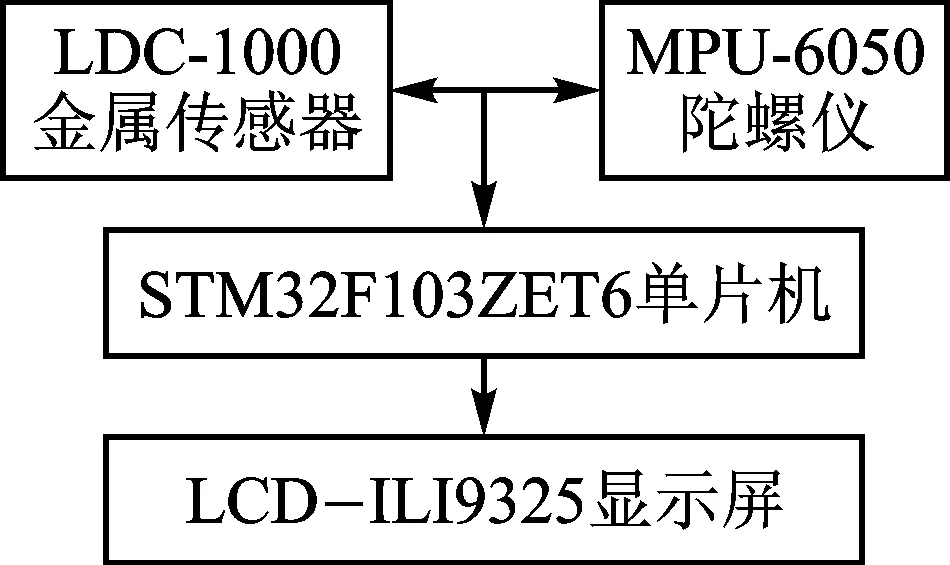
圖1 總體方案框圖
本系統是基于STM32F103單片機為核心的控制器,采用LDC-1000金屬傳感器模塊和MPU-6050陀螺儀作為鋼珠的識別及方向檢測。STM32F103單片機以Arm Cortex-M3內核為核心的編程器, 通過LDC-1000金屬傳感器采集鋼珠的數量信息,并經MPU-6050陀螺儀檢測運行方向,采用卡爾曼濾波(Kalman filtering)融合算法獲取管道角度和角速度,最終由LCD-ILI9325顯示屏顯示數量、角度及鋼珠滾動的方向,總體方案框圖如圖1所示。
2 硬件設計
2.1 主控系統
本系統采用STM32F103ZET6作為核心控制芯片,具有72 MHz時鐘頻率,64 KB的SRAM,2個DMA控制器,支持ADC、定時器、SPI、USB、I2C和UART等外圍設備。系統采用STM32F103單片機控制LDC-1000金屬傳感器模塊、MPU-6050 9軸運動陀螺儀、LCD-ILI9325顯示屏等各部分電路。……
登錄APP查看全文
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
