某制空型無(wú)人機(jī)武器系統(tǒng)數(shù)字仿真軟件設(shè)計(jì)
2018-09-10 02:21:34王培金琳乘
無(wú)人機(jī) 2018年4期
王培 金琳乘

針對(duì)制空型無(wú)人作戰(zhàn)飛機(jī)仿真演示驗(yàn)證預(yù)先研究的需求,提出了一種武器系統(tǒng)數(shù)字仿真軟件設(shè)計(jì)方法,包含懸掛物管理分系統(tǒng)和機(jī)載武器系統(tǒng)兩部分內(nèi)容,并通過(guò)測(cè)試驗(yàn)證了武器控制管理邏輯的正確性,空空導(dǎo)彈彈道輸出數(shù)據(jù)的準(zhǔn)確性。
無(wú)人機(jī)的自主作戰(zhàn)能力是無(wú)人機(jī)的最大特性,隨著科技的發(fā)展,無(wú)人機(jī)在整個(gè)作戰(zhàn)體系中扮演著越來(lái)越重要的角色是必然趨勢(shì)。針對(duì)未來(lái)戰(zhàn)爭(zhēng)需求,各國(guó)正積極探索開(kāi)發(fā)無(wú)人系統(tǒng)之間的協(xié)同作戰(zhàn)能力。從目前的裝備能力和技術(shù)水平來(lái)看,現(xiàn)階段,無(wú)人機(jī)作為協(xié)同空戰(zhàn)系統(tǒng)中的作戰(zhàn)執(zhí)行者,也是整個(gè)指揮控制環(huán)的終端環(huán)節(jié),無(wú)人機(jī)的作戰(zhàn)能力對(duì)整個(gè)協(xié)同系統(tǒng)的作戰(zhàn)效能具有直接影響。在一次制空作戰(zhàn)中,無(wú)人機(jī)的戰(zhàn)術(shù)角色會(huì)根據(jù)戰(zhàn)場(chǎng)環(huán)境的變化,作為武器投放平臺(tái)具備中遠(yuǎn)距武器自動(dòng)投放能力。并且在必要時(shí),可實(shí)現(xiàn)直接投放中距精確制導(dǎo)導(dǎo)彈攻擊敵先進(jìn)戰(zhàn)機(jī)的戰(zhàn)術(shù)需求。因此,機(jī)載武器系統(tǒng)對(duì)提高無(wú)人機(jī)的作戰(zhàn)效能具有重要作用。
武器系統(tǒng)數(shù)字仿真軟件設(shè)計(jì)
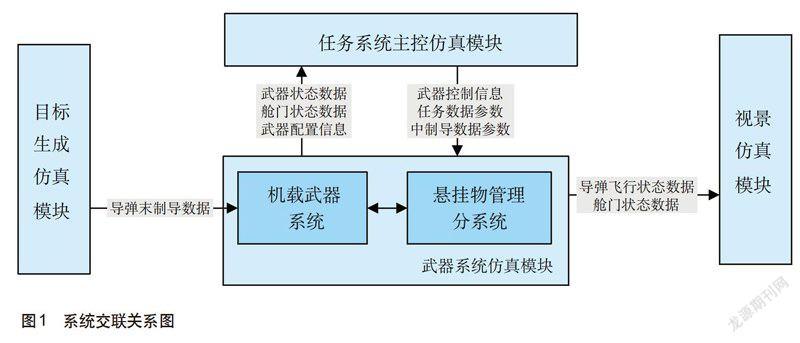
武器系統(tǒng)數(shù)字仿真軟件主要模擬懸掛物管理系統(tǒng)及其所管理的飛機(jī)掛載武器系統(tǒng),由懸掛物管理分系統(tǒng)仿真模塊和機(jī)載武器系統(tǒng)仿真模塊組成,具備多機(jī)控制能力,可控制紅、藍(lán)雙方各四架飛機(jī)(其中控制飛機(jī)數(shù)量通過(guò)輸入來(lái)源于總控臺(tái)的“紅、藍(lán)對(duì)抗數(shù)量”確定),每架飛機(jī)四個(gè)掛點(diǎn),通過(guò)實(shí)時(shí)以太網(wǎng)與任務(wù)系統(tǒng)主控仿真模塊、視景仿真模塊和目標(biāo)生成仿真模塊之間交聯(lián),模擬武器與制空型無(wú)人機(jī)之間的接口通訊,對(duì)武器從掛載到上電、準(zhǔn)備、發(fā)射、離機(jī)以及武器飛行彈道的全過(guò)程進(jìn)行仿真,完成武器的發(fā)控管理以及武器投放后的彈道解算,并向視景仿真模塊輸出武器發(fā)射后的飛行彈道及內(nèi)埋彈倉(cāng)的開(kāi)關(guān)狀態(tài)。
武器系統(tǒng)數(shù)字仿真模塊與航電系統(tǒng)在配套仿真驗(yàn)證環(huán)境中的各個(gè)模塊交聯(lián)關(guān)系如圖1所示。
武器系統(tǒng)數(shù)字仿真軟件與任務(wù)系統(tǒng)主控仿真模塊、視景仿真模塊以及目標(biāo)生成仿真模塊交聯(lián),交聯(lián)數(shù)據(jù)如下:
a)與任務(wù)系統(tǒng)主控仿真模塊交聯(lián),傳遞武器狀態(tài)數(shù)據(jù)、艙門狀態(tài)數(shù)據(jù)以及武器配置信息,并且傳遞機(jī)載武器控制信息、任務(wù)數(shù)據(jù)、中制導(dǎo)數(shù)據(jù);
b)接收目標(biāo)生成仿真模塊的真實(shí)目標(biāo)數(shù)據(jù)作為導(dǎo)彈末制導(dǎo)目標(biāo)數(shù)據(jù)參數(shù);
c)向視景仿真模塊輸出導(dǎo)彈飛行狀態(tài)數(shù)據(jù)及艙門狀態(tài)數(shù)據(jù)。
為提高武器系統(tǒng)數(shù)字仿真軟件的復(fù)用性,仿真軟件采用C語(yǔ)言類的封裝形式,生成飛機(jī)懸掛物管理分系統(tǒng)類對(duì)象,通過(guò)接收總控臺(tái)的“紅、藍(lán)對(duì)抗數(shù)量”確定仿真飛機(jī)的數(shù)量,生產(chǎn)相應(yīng)數(shù)量的懸掛物管理分系統(tǒng)類實(shí)例,達(dá)到同時(shí)實(shí)現(xiàn)仿真多架飛機(jī)武器系統(tǒng)的功能。
懸掛物管理分系統(tǒng)軟件仿真設(shè)計(jì)
武器系統(tǒng)中的懸掛物管理分系統(tǒng)接收由任務(wù)系統(tǒng)主控模塊發(fā)送的武器控制信息,控制機(jī)載武器系統(tǒng)選擇具體的武器占位并控制占位武器進(jìn)行從參數(shù)裝訂、準(zhǔn)備到正常發(fā)射的工作流程和狀態(tài),并下發(fā)機(jī)載武器雷達(dá)彈、紅外彈所需裝訂的任務(wù)參數(shù)信息;向任務(wù)系統(tǒng)主控模塊傳遞武器系統(tǒng)的狀態(tài)數(shù)據(jù)以及艙門狀態(tài)數(shù)據(jù)。懸掛物管理分系統(tǒng)在得到懸掛物清單后通過(guò)任務(wù)系統(tǒng)主控模塊傳輸給地面站進(jìn)行顯示;在導(dǎo)彈發(fā)射后向視景仿真模塊輸出導(dǎo)彈飛行狀態(tài)數(shù)據(jù)及艙門狀態(tài)數(shù)據(jù);在導(dǎo)彈中末制導(dǎo)交班后,向彈道仿真程序轉(zhuǎn)發(fā)由目標(biāo)生成仿真模塊生成的真實(shí)目標(biāo)信息。
機(jī)載武器雷達(dá)彈、紅外彈的機(jī)上工作邏輯及飛行導(dǎo)彈解算等仿真功能,通過(guò)動(dòng)態(tài)鏈接庫(kù)的方式提供給懸掛物管理分系統(tǒng)仿真軟件,仿真軟件根據(jù)工作模式,調(diào)用相應(yīng)的API函數(shù),完成參數(shù)的輸入,獲取武器工作狀態(tài)、導(dǎo)彈飛行數(shù)據(jù)。
對(duì)懸掛物管理分系統(tǒng)的核心功能需求進(jìn)行分析:
(1)作為武器系統(tǒng)的主控計(jì)算機(jī),能夠具備調(diào)用局域網(wǎng)內(nèi)(實(shí)時(shí)網(wǎng)/以太網(wǎng)環(huán)境下)其它計(jì)算機(jī)中的彈道解算軟件的功能;
(2)可實(shí)現(xiàn)紅、藍(lán)對(duì)抗雙方各四架飛機(jī)、每架飛機(jī)4個(gè)掛點(diǎn)的武器仿真管理,武器類型為中遠(yuǎn)距雷達(dá)制導(dǎo)導(dǎo)彈、近距紅外格斗導(dǎo)彈,其中左右彈倉(cāng)可各內(nèi)埋懸掛2枚空空導(dǎo)彈,具備混掛能力;
(3)負(fù)責(zé)艙門狀態(tài)管理,控制管理彈艙艙門開(kāi)/閉,協(xié)調(diào)艙門開(kāi)/閉和武器投放時(shí)機(jī);
(4)負(fù)責(zé)武器清單管理、武器狀態(tài)管理、武器占位管理及武器故障管理;
(5)實(shí)現(xiàn)機(jī)載武器的發(fā)控管理功能,包含:供電控制、參數(shù)裝訂、地面自檢、空中準(zhǔn)備、投放控制及安全性管理;具備導(dǎo)彈自動(dòng)準(zhǔn)備功能,能夠進(jìn)行多枚導(dǎo)彈的同時(shí)準(zhǔn)備;
(6)具備導(dǎo)彈發(fā)射后模擬數(shù)據(jù)鏈向空空導(dǎo)彈傳遞中制導(dǎo)信息,并接收其回傳的彈道數(shù)據(jù)以及武器狀態(tài)數(shù)據(jù)信息,并保證能夠?qū)崟r(shí)的向視景系統(tǒng)進(jìn)行傳輸;
(7)具備與任務(wù)系統(tǒng)主控仿真模塊、視景仿真模塊以及目標(biāo)生成仿真模塊的交聯(lián)功能;
(8)具有可擴(kuò)展接口,具備調(diào)用其它武器控制模塊功能以及預(yù)留武器相應(yīng)計(jì)算模塊嵌入功能。
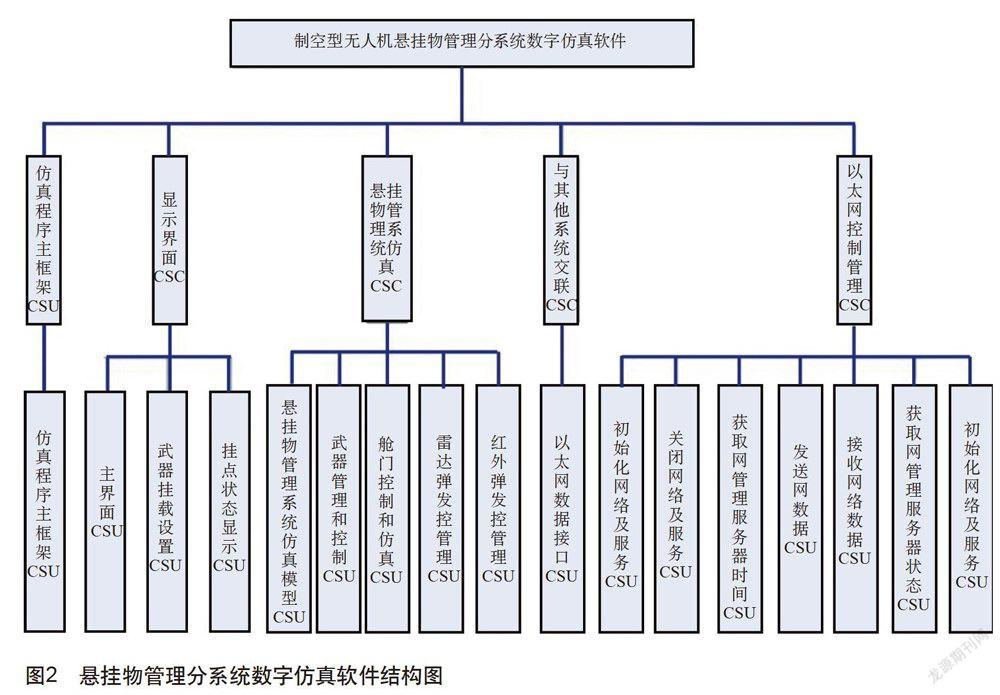
對(duì)懸掛物管理分系統(tǒng)仿真軟件核心功能需求分析的基礎(chǔ)上,按照軟件的內(nèi)在邏輯關(guān)系及模塊化程序設(shè)計(jì)思想,把仿真軟件劃分為5個(gè)相對(duì)獨(dú)立又相互依存的計(jì)算機(jī)軟件部件(簡(jiǎn)稱CSC),每個(gè)計(jì)算機(jī)軟件部件下又細(xì)化為多個(gè)計(jì)算機(jī)軟件單元(簡(jiǎn)稱CSU)。在程序設(shè)計(jì)過(guò)程中,力求把計(jì)算機(jī)軟件部件之間的耦合關(guān)系降到最低,保證各個(gè)計(jì)算機(jī)軟件部件之間接口明確、簡(jiǎn)練。各計(jì)算機(jī)軟件部件功能說(shuō)明:
(1)仿真程序管理(SysProcess_Manage):仿真程序管理,實(shí)現(xiàn)仿真軟件的運(yùn)行,包括界面顯示、接口數(shù)據(jù)管理、懸掛物管理系統(tǒng)管理:
(2)顯示界面(SysProcess_Display):提供仿真軟件所需要的操作顯示界面,調(diào)用仿真程序主框架,根據(jù)仿真結(jié)果和界面操作在仿真器上實(shí)時(shí)顯示軟件運(yùn)行狀態(tài)、武器系統(tǒng)狀態(tài)、關(guān)鍵數(shù)據(jù)監(jiān)控:
(3)以太網(wǎng)控制管理(SysProcess_Net):獲取網(wǎng)絡(luò)服務(wù),包括啟動(dòng)、關(guān)閉網(wǎng)絡(luò),接收、發(fā)送數(shù)據(jù),獲取網(wǎng)管服務(wù)器狀態(tài),執(zhí)行仿真程序主框架等:
(4)懸掛物管理系統(tǒng)仿真(SysProcess_SMSSim):仿真懸掛物管理系統(tǒng)功能,實(shí)現(xiàn)懸掛物管理系統(tǒng)仿真模型、武器管理和控制、艙門控制和仿真、雷達(dá)彈發(fā)控管理、紅外彈發(fā)控管理:
(5)與其他系統(tǒng)交聯(lián)(SysProcess_Systems):從任務(wù)系統(tǒng)主控臺(tái)獲取命令和數(shù)據(jù)供轉(zhuǎn)換為仿真軟件各計(jì)算機(jī)軟件部件使用的數(shù)據(jù)和命令,獲取武器飛行數(shù)據(jù)和艙門狀態(tài)后向視景仿真系統(tǒng)發(fā)送。
懸掛物管理分系統(tǒng)仿真軟件的頂層結(jié)構(gòu)見(jiàn)圖2。
懸掛物管理分系統(tǒng)仿真模型流程見(jiàn)圖3,軟件接口關(guān)系見(jiàn)圖4。
機(jī)載武器系統(tǒng)仿真軟件設(shè)計(jì)
機(jī)載武器系統(tǒng)仿真軟件作為武器系統(tǒng)仿真軟件的一個(gè)模塊,由懸掛物管理分系統(tǒng)仿真軟件進(jìn)行調(diào)用,制空型無(wú)人機(jī)掛載的武器為兩型空空導(dǎo)彈,分別為中遠(yuǎn)距雷達(dá)制導(dǎo)導(dǎo)彈、近距紅外格斗導(dǎo)彈。機(jī)載武器系統(tǒng)仿真軟件所需的任務(wù)數(shù)據(jù)與中制導(dǎo)、末制導(dǎo)數(shù)據(jù)均由懸掛物管理分系統(tǒng)負(fù)責(zé)轉(zhuǎn)發(fā),接收懸掛物管理分系統(tǒng)的控制信息并按照控制邏輯回傳相應(yīng)的狀態(tài)數(shù)據(jù)。
機(jī)載武器系統(tǒng)仿真軟件能夠?qū)?dǎo)彈的加溫、準(zhǔn)備、發(fā)射、中制導(dǎo)(含中末制導(dǎo)交接)、末制導(dǎo)的整個(gè)工作過(guò)程進(jìn)行模擬,完成彈道仿真計(jì)算,并輸出導(dǎo)彈彈道參數(shù)和截獲等信息。
對(duì)機(jī)載武器系統(tǒng)仿真軟件的核心功能需求進(jìn)行分析:
(1)具備武器離梁后的彈道解算功能,周期性實(shí)時(shí)解算并輸出空空導(dǎo)彈的三自由度彈道和姿態(tài)等數(shù)據(jù),并通過(guò)實(shí)時(shí)網(wǎng)傳輸;
(2)具備模擬空空導(dǎo)彈中制導(dǎo)數(shù)據(jù)鏈制導(dǎo)數(shù)據(jù)接收與導(dǎo)彈位置回傳功能;
(3)具有同時(shí)輸出多枚空空導(dǎo)彈彈道仿真能力;
(4)具備攻擊雙目標(biāo)的仿真功能;
(5)能夠模擬導(dǎo)彈準(zhǔn)備、發(fā)射、離機(jī)、空間運(yùn)動(dòng)、制導(dǎo)飛行、導(dǎo)引頭截獲目標(biāo)、命中或偏離目標(biāo)等狀態(tài);
(6)具備武器掛機(jī)工作流程仿真功能;
(7)紅外制導(dǎo)導(dǎo)彈要求在現(xiàn)有產(chǎn)品基礎(chǔ)上達(dá)到數(shù)據(jù)鏈支持下的發(fā)射后截獲目標(biāo)的能力。
對(duì)機(jī)載武器系統(tǒng)仿真軟件核心功能需求分析的基礎(chǔ)上,按照功能劃分,機(jī)載武器系統(tǒng)仿真軟件主要分為操作使用模塊、彈道仿真模塊兩部分:
(1)操作使用模塊:能夠完成導(dǎo)彈掛機(jī)時(shí)接收飛行任務(wù)信息,完成導(dǎo)彈加溫、準(zhǔn)備、發(fā)射過(guò)程的模擬,在系統(tǒng)給出激勵(lì)時(shí),能夠按照導(dǎo)彈的真實(shí)工作過(guò)程,延遲相應(yīng)時(shí)間后給出響應(yīng)。
(2)彈道仿真模塊:主要用于導(dǎo)彈整個(gè)自主飛行過(guò)程的模擬,能夠根據(jù)飛行任務(wù)信息,實(shí)現(xiàn)導(dǎo)彈不同工作模式下的飛行彈道計(jì)算。雷達(dá)制導(dǎo)型導(dǎo)彈仿真軟件在收到“發(fā)射”指令時(shí),能夠根據(jù)輸入的發(fā)射條件,對(duì)雷達(dá)制導(dǎo)型導(dǎo)彈攻擊目標(biāo)時(shí)的飛行特性進(jìn)行彈道仿真和模擬,同時(shí)輸出特定的彈道參數(shù)和仿真結(jié)果。
機(jī)載武器系統(tǒng)仿真軟件結(jié)構(gòu)見(jiàn)圖5。
空導(dǎo)彈仿真軟件根據(jù)外部提供的控制時(shí)序進(jìn)行工作,并根據(jù)載機(jī)、目標(biāo)信息進(jìn)行彈道的仿真計(jì)算。
武器系統(tǒng)數(shù)字仿真軟件設(shè)計(jì)測(cè)試驗(yàn)證
制空型無(wú)人作戰(zhàn)飛機(jī)武器系統(tǒng)數(shù)字仿真軟件開(kāi)始運(yùn)行后,在總控制臺(tái)的控制下,通過(guò)實(shí)時(shí)網(wǎng),接收任務(wù)系統(tǒng)綜合管理仿真模塊的命令控制進(jìn)行彈艙內(nèi)武器數(shù)據(jù)加載,加載完成后上報(bào)武器配置清單,并對(duì)加載的武器進(jìn)行參數(shù)裝訂。武器發(fā)射后調(diào)用彈道解算函數(shù)實(shí)時(shí)解算武器彈道,模擬中制導(dǎo)過(guò)程向空空導(dǎo)彈傳遞中制導(dǎo)數(shù)據(jù)信息,并將飛行數(shù)據(jù)與內(nèi)埋彈倉(cāng)艙門的開(kāi)關(guān)狀態(tài)發(fā)送給視景仿真模塊,進(jìn)行顯示。分別對(duì)單機(jī)測(cè)試狀態(tài)、單機(jī)對(duì)抗?fàn)顟B(tài)、多機(jī)對(duì)抗?fàn)顟B(tài)進(jìn)行測(cè)試驗(yàn)證。
單機(jī)測(cè)試狀態(tài)試驗(yàn)
在紅方或藍(lán)方單機(jī)狀態(tài)下由試驗(yàn)總控臺(tái)模擬目標(biāo),載機(jī)掛載兩枚空空導(dǎo)彈進(jìn)行攔截模式試驗(yàn)。導(dǎo)彈掛機(jī)狀態(tài)由火控系統(tǒng)傳輸任務(wù)數(shù)據(jù)參數(shù),導(dǎo)彈離機(jī)后由本機(jī)發(fā)送中制導(dǎo)數(shù)據(jù),在末制導(dǎo)導(dǎo)引頭開(kāi)機(jī)后,懸掛物管理分系統(tǒng)將目標(biāo)(目標(biāo)仿真器中目標(biāo)位置信息)真實(shí)坐標(biāo)發(fā)送給武器仿真系統(tǒng)。主要驗(yàn)證武器管理邏輯、空空導(dǎo)彈彈道輸出數(shù)據(jù)和命中狀態(tài)。
試驗(yàn)中設(shè)置了多種目標(biāo)位置和航線攻擊,均能有效完成攻擊任務(wù),驗(yàn)證了武器管理邏輯正確,空空導(dǎo)彈彈道輸出數(shù)據(jù)正確。具體試驗(yàn)結(jié)果見(jiàn)圖6。
單機(jī)對(duì)抗?fàn)顟B(tài)試驗(yàn)
在紅方、藍(lán)方各一架機(jī)狀態(tài)下進(jìn)行對(duì)抗測(cè)試,雙方載機(jī)各掛載兩枚空空導(dǎo)彈進(jìn)行攔截模式試驗(yàn)。導(dǎo)彈掛機(jī)狀態(tài)由火控系統(tǒng)傳輸任務(wù)數(shù)據(jù)參數(shù),導(dǎo)彈離機(jī)后由本機(jī)發(fā)送中制導(dǎo)數(shù)據(jù),在末制導(dǎo)導(dǎo)引頭開(kāi)機(jī)后,懸掛物管理分系統(tǒng)將目標(biāo)(紅、藍(lán)方目標(biāo)機(jī)位置信息)真實(shí)坐標(biāo)發(fā)送給武器仿真系統(tǒng)。主要驗(yàn)證紅藍(lán)雙方單機(jī)狀態(tài)下武器管理邏輯、空空導(dǎo)彈彈道輸出數(shù)據(jù)和命中狀態(tài)。
試驗(yàn)中設(shè)置了多種目標(biāo)位置和航線對(duì)抗攻擊,均能有效完成攻擊任務(wù),驗(yàn)證了紅藍(lán)雙方武器管理邏輯正確,空空導(dǎo)彈彈道輸出數(shù)據(jù)正確。具體試驗(yàn)結(jié)果見(jiàn)圖7。
多機(jī)對(duì)抗?fàn)顟B(tài)試驗(yàn)
在紅方、藍(lán)方各兩架機(jī)狀態(tài)下進(jìn)行對(duì)抗測(cè)試,雙方載機(jī)各掛載兩枚空空導(dǎo)彈進(jìn)行攔截模式試驗(yàn)。導(dǎo)彈掛機(jī)狀態(tài)由火控系統(tǒng)傳輸任務(wù)數(shù)據(jù)參數(shù),導(dǎo)彈離機(jī)后由本機(jī)發(fā)送中制導(dǎo)數(shù)據(jù),在末制導(dǎo)導(dǎo)引頭開(kāi)機(jī)后,懸掛物管理分系統(tǒng)將目標(biāo)(紅、藍(lán)方目標(biāo)機(jī)位置信息)真實(shí)坐標(biāo)發(fā)送給武器仿真系統(tǒng)。主要驗(yàn)證紅藍(lán)雙方多機(jī)狀態(tài)下武器管理邏輯、空空導(dǎo)彈彈道輸出數(shù)據(jù)和命中狀態(tài)。
試驗(yàn)中設(shè)置了多種目標(biāo)位置和航線多機(jī)對(duì)抗攻擊,均能有效完成攻擊任務(wù),驗(yàn)證了紅藍(lán)雙方多機(jī)狀態(tài)武器管理邏輯正確,空空導(dǎo)彈彈道輸出數(shù)據(jù)正確。具體試驗(yàn)結(jié)果見(jiàn)圖8。
結(jié)論
制空型無(wú)人機(jī)武器系統(tǒng)數(shù)字仿真軟件是在深入分析課題功能需求的基礎(chǔ)上進(jìn)行設(shè)計(jì)和開(kāi)發(fā),并在試驗(yàn)驗(yàn)證中采用多種目標(biāo)生成方法和載機(jī)飛行狀態(tài),均能有效完成攻擊任務(wù),驗(yàn)證了武器控制管理邏輯的正確性,空空導(dǎo)彈彈道輸出數(shù)據(jù)的正確性。能夠滿足制空型無(wú)人機(jī)課題使用需求。
猜你喜歡
今日農(nóng)業(yè)(2022年15期)2022-09-20 06:56:20
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:26:30
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:26:20
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
雜文月刊(2016年1期)2016-02-11 10:35:51
