動(dòng)態(tài)偏最小二乘在軟測量建模方法中的應(yīng)用
2018-09-15 04:35:10高世偉王忠民洪梓榕
自動(dòng)化儀表 2018年9期
高世偉,王忠民,洪梓榕
(1.蘭州石化職業(yè)技術(shù)學(xué)院電子電氣工程學(xué)院,甘肅 蘭州 730060;2.中國石油蘭州石化公司自動(dòng)化研究院,甘肅 蘭州 730060)
0 引言
軟測量技術(shù)依據(jù)可測特別是易測的變量,通過構(gòu)建數(shù)學(xué)模型,對難以直接測量的變量進(jìn)行預(yù)估。由于工業(yè)生產(chǎn)過程一般來說比較復(fù)雜,并且具有明顯、固有的非線性特征,所以采用嚴(yán)格的理論建模方法往往不切實(shí)際[1]。因此,基于數(shù)據(jù)驅(qū)動(dòng)的軟測量技術(shù)得到了廣泛的研究和發(fā)展。其中,多元線性回歸(multiple linear regression,MLR)是基本的軟測量模型[2-3]。主成分分析法(principal component analysis,PCA)和偏最小二乘法(partial least square method,PLS)是應(yīng)用廣泛的多元回歸技術(shù),也被用于軟測量建模[4-6]。為適應(yīng)過程的動(dòng)態(tài)特性,還開發(fā)了動(dòng)態(tài)主成分分析法(dynamic principal component analysis,DPCA)和動(dòng)態(tài)偏最小二乘法(dynamic partial least squares,DPLS)等方法[7-9]。基于DPLS的軟測量在不同類型的工業(yè)生產(chǎn)過程中得到了廣泛應(yīng)用[10-11]。但在執(zhí)行DPLS時(shí),如輸入數(shù)據(jù)矩陣中增加較多的滯后測量值會(huì)增加矩陣的維數(shù),實(shí)施多元回歸需要較大的計(jì)算量。
本文采用一種改進(jìn)的DPLS方法。該方法不僅減小了模型尺寸,而且能改善預(yù)測效果。
1 偏最小二乘回歸
PLS算法是由Wold等人發(fā)明的多元統(tǒng)計(jì)數(shù)據(jù)分析方法[12]。它利用某些輔助變量來預(yù)測主要變量,當(dāng)各變量內(nèi)部高度線性相關(guān)時(shí),這種方法非常有效。設(shè)X∈Rm×n、Y∈Rn×q分別表示輸入數(shù)據(jù)矩陣和輸出數(shù)據(jù)矩陣,n是樣本數(shù),m是樣本中的變量數(shù),q是因變量數(shù)量。假設(shè)X和Y線性相關(guān):
Y=XC+V
(1)
式中:C為系數(shù)矩陣;V為噪聲矩陣。
PLS首先將數(shù)據(jù)矩陣X和Y分解成雙線性項(xiàng),得到線性模型:
X=TPT+E
(2)
Y=UQT+F
(3)
式中:T∈Rn×a和U∈Rn×a分別為X和Y的得分矩陣;a為保留的PLS成分?jǐn)?shù)量;P∈Rm×a和Q∈Rp×a為載荷矩陣;E和F為殘差矩陣,是運(yùn)用偏最小二乘法擬合矩陣X和Y時(shí)引入的誤差。PLS的目的是盡可能多地描述Y的變化,可以通過內(nèi)部線性模型將X和Y相關(guān)聯(lián):
U=TB+R
(4)

(5)
2 降維DPLS軟測量方法
基于DPLS的軟測量可以為開環(huán)和閉環(huán)數(shù)據(jù)提供主要變量的無偏估計(jì)[13-14],是一個(gè)動(dòng)態(tài)的估計(jì)器,可充分捕獲過程動(dòng)態(tài)特性。它的基本思想是利用增量測量(滯后數(shù)據(jù))來捕獲過程動(dòng)態(tài)特性。通常使用子空間辨識(shí)框架推導(dǎo)出DPLS軟測量公式。在子空間辨識(shí)中,一個(gè)隨機(jī)線性系統(tǒng)可以用以下形式表示:
(6)

為了獲得動(dòng)態(tài)軟測量公式,將系統(tǒng)方程轉(zhuǎn)化為預(yù)測形式[13]:
(7)


(8)
同樣,依據(jù)式(7)中的狀態(tài)空間描述,可以得到擴(kuò)展的輸出方程:
(9)
(10)

(11)
(12)
(13)
(14)
當(dāng)p較大時(shí),式(9)、式(10)可以簡化為:
(15)
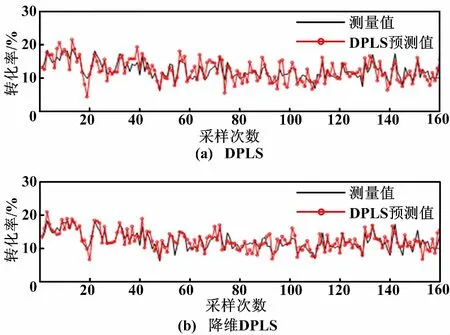
為便于系統(tǒng)矩陣的估計(jì),通常需要n (16) (17) 式中:dui為第i個(gè)輸入和所求關(guān)鍵參數(shù)之間的延時(shí);dyj為第j個(gè)輔助輸出與關(guān)鍵參數(shù)之間的延時(shí)。 通過引入過程延遲信息,有效減小了回歸器的維數(shù)。改進(jìn)后的DPLS軟測量方法存在輔助變量選擇的問題。選擇不適當(dāng)?shù)妮o助變量作為軟測量的輸入,會(huì)降低預(yù)測精度。只有選用那些對主變量最敏感的輔助變量,才有可能獲得滿意的效果。 下一個(gè)關(guān)鍵步驟是估計(jì)與不同變量相關(guān)的延遲。對于工業(yè)生產(chǎn)過程中不同位置收集的測量值,相關(guān)的傳輸延遲是不同的。通過識(shí)別每個(gè)相關(guān)聯(lián)的延遲時(shí)間,可以有效地減少系統(tǒng)階數(shù)。為了提取主要輸出和輔助輸出之間的動(dòng)態(tài)關(guān)系,必須確定所需的過去時(shí)間范圍。對于線性系統(tǒng),可根據(jù)動(dòng)態(tài)系統(tǒng)的階數(shù)來確定過去時(shí)間范圍。對于非線性系統(tǒng),選取的過去時(shí)間范圍可以更大,以獲得與實(shí)際非線性關(guān)系更好的線性近似[17]。 接下來驗(yàn)證引入降維方法后的DPLS性能。DPLS與降維DPLS的預(yù)測對比如圖1所示。 圖1 DPLS與降維DPLS預(yù)測對比圖 在丁苯橡膠生產(chǎn)過程中,轉(zhuǎn)化率是表征聚合反應(yīng)進(jìn)程的一項(xiàng)重要質(zhì)量指標(biāo)參數(shù),數(shù)值越高,說明轉(zhuǎn)化率越高。生產(chǎn)廠家多采用人工間歇化驗(yàn)的方法取得,但是通常人工化驗(yàn)周期長,裝置操作人員無法及時(shí)獲得轉(zhuǎn)化率數(shù)據(jù),就無法對裝置產(chǎn)生的波動(dòng)及時(shí)跟蹤并進(jìn)行處理。因此,實(shí)現(xiàn)轉(zhuǎn)化率數(shù)據(jù)的在線測量,對于提高裝置生產(chǎn)效率具有非常重要的作用。目前,國內(nèi)外沒有能夠在線測量橡膠轉(zhuǎn)化率的儀表,但是軟測量技術(shù)在橡膠轉(zhuǎn)化率的測量已有一些研究[17]。基于前期的研究成果[18-19],在研究中選取垂直差壓、水平差壓、反應(yīng)釜周圍環(huán)境溫度、反應(yīng)釜攪拌功率、裝置管道壓力、膠漿溫度、乙烯混合總流量等信號(hào)為關(guān)鍵參數(shù)。收集160組生產(chǎn)歷史數(shù)據(jù),在經(jīng)過濾波等預(yù)處理后進(jìn)行模型仿真。對于DPLS和降維后的DPLS,選擇相同的歷史數(shù)據(jù)建立軟測量,并將兩種模型預(yù)測數(shù)據(jù)分別與人工化驗(yàn)測量數(shù)據(jù)進(jìn)行對比。 兩種在線檢測方法預(yù)測數(shù)據(jù)的變化趨勢與試驗(yàn)室分析得到的轉(zhuǎn)化率變化趨勢基本吻合,都能較好地滿足工藝控制的實(shí)際需要。為了從數(shù)據(jù)上評估兩種軟測量技術(shù)的性能,采用兩種預(yù)測值與化驗(yàn)分析值的均方根誤差進(jìn)行對比。均方根誤差能夠很好地反映測量的精密度。通過計(jì)算可知,DPLS與降維后DPLS的均方根誤差分別為1.964 1和1.705 6。由此可以看出,新的方法提高了模型預(yù)測能力。新方法有效地減小了回歸器的維數(shù),特別是當(dāng)處理的數(shù)據(jù)較多,且變量數(shù)較大時(shí)計(jì)算量也會(huì)較DPLS低。 本文采用一種降維的DPLS方法進(jìn)行軟測量模型建立。通過估計(jì)過程中涉及的傳輸延遲,將時(shí)移變量作為回歸變量來減少系統(tǒng)的階數(shù),從而減少了預(yù)測所需的過去時(shí)間。這樣不僅可以獲得提供優(yōu)良性能的降維后模型,而且可以實(shí)現(xiàn)多步預(yù)測。通過對丁苯橡膠生產(chǎn)過程的仿真,證明了該方法的有效性。該方法為今后軟測量模型的研究提供了一種思路。
3 仿真試驗(yàn)
4 結(jié)束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
