反無人機射頻前端設計
2018-09-19 03:40:48石伯翔
數(shù)碼設計 2018年3期
石伯翔
(西安電子工程研究所,陜西西安,710010)
引言
無人機技術的日漸成熟,其應用領域也愈發(fā)廣泛,與此同時帶來了嚴重的安防問題。雷達探測由于不受環(huán)境、天氣變化影響等優(yōu)點,是無人機探測的一種主要手段。但由于無人機飛行高度低、速度慢、目標小,對雷達系統(tǒng)構成了與傳統(tǒng)雷達要解決問題的巨大差異[1],同時由于無人機對于探測雷達大多數(shù)情況下處于近距離工作,無人機的任意方向移動能力,形成了目標弧度角的快速變化,對雷達波束的快速跟蹤又構成成了較大的挑戰(zhàn)。對于無人機這種“低、小、慢”的探測,波束要求兼具長的駐留時間和指向快速變化的能力。常見的波束掃描方式有機械掃描和相控掃描,機械掃描成本低,但波束掃描速度慢;相控掃可以實現(xiàn)波束的快速掃描,但是成本高[2]。針對這兩種波束掃描方式的特點,本文提出了一種低成本的全電控陣列前端方案,該方案具備波束快速掃描的能力,同時也具備低成本的特點。
1 射頻前端總體方案
無人機探測系統(tǒng)具有主動探測和被動探測兩種工作模式。在被動接收探測模式下,無人機探測系統(tǒng)主要接收無人機的遙控信號,通過對無人機發(fā)出信號的探測,確定無人的位置。在被動探測狀態(tài),系統(tǒng)需要方位維360°同時接收信號的能力以及俯仰維波束的能力。在主動探測模式下,系統(tǒng)工作原理與常規(guī)雷達相同。主動工作模式主要應對夜間、大霧、以及被動探測失效的狀態(tài)。
該射頻前端為無人機探測雷達系統(tǒng)提供信號輸入。全電控陣列射頻前端系統(tǒng)構成如圖 1所示。該系統(tǒng)天線采用收發(fā)分置方式,整個射頻前端由共形陣列天線、俯仰維模擬多波束網(wǎng)絡、下變頻接收模塊、校準網(wǎng)絡、發(fā)射天線和北斗天線構成。
在被動探接收探測模式下,接收天線陣列在俯仰維形成覆蓋探測空域的波束,在方位維,通過多通道下變頻模塊為方位為實現(xiàn)數(shù)字DBF功能提供多路中頻輸出。俯仰維波束選擇通過射頻開關控制實現(xiàn),方位維波束由數(shù)字波束形成產(chǎn)生,從而形成一個可高速波束切換的全電控射頻前端。在主動探測模式下,系統(tǒng)工作原理與常規(guī)雷達相同,此時需要發(fā)射天線向外發(fā)射信號,通過接收目標的回波信號完成探測定位功能,發(fā)射天線采用了低成本的套筒形式單極子天線,發(fā)射天為全向型天線。全向的發(fā)射天線與方位維的DBF接收體系相結合,實現(xiàn)方位 360°的全覆蓋。同時,該射頻前端還集成了北斗定位天線,為系統(tǒng)提供北斗定位信號。

圖1 系統(tǒng)原理圖
2 天線單元
2.1 發(fā)射天線單元
在主動探測模式下,該系統(tǒng)向外發(fā)射信號,通過接收目標的回波信號完成對目標的探測定位。系統(tǒng)采用套筒式單極子天線作為發(fā)射天線[3],其具有以下優(yōu)勢:1、單極子子天線是典型的全向天線,具有良好的輻射特性,結構簡單,重量輕,成本低;2、相比于機械掃描天線和相控陣天線,其在形成全向波束的同時,無需伺服系統(tǒng)和饋電網(wǎng)絡,從而可以達到簡化系統(tǒng)結構、降低成本的目的。
2.2 北斗天線單元
為了完成對無人機的定位,本系統(tǒng)需要對自身進行定位。北斗二代衛(wèi)星導航系統(tǒng)采用“無源工作方式”,用戶只需要接收衛(wèi)星信號便可完成導航定位。該系統(tǒng)工作于L波段并可兼容GPS和Galileo等系統(tǒng)[4]。該方案采用北斗天線作為系統(tǒng)定位天線,北斗天線工作頻段BD2 B1/GPS L1,極化方式右旋圓極化。
3 接收天線陣列
由本系統(tǒng)要求的波束覆蓋范圍較大,傳統(tǒng)平面陣不能滿足需求。共形陣[5]在一定程度上可以克服平面陣的缺點,由于陣列在結構上具有與載體共形這一特點,導致波束掃描角比平面陣大,這是本系統(tǒng)采用共形陣列的一個主要原因。本系統(tǒng)采用錐臺結構,方位維通過控制電路(開關矩陣或者數(shù)字波束形成)可以完成360°波束掃描;由于錐臺陣存在一定的傾角,故俯仰維有更大的掃描范圍。
該系統(tǒng)接收天線單元采用圓極化微帶天線[6]。原因有以下兩點,第一,微帶天線具有低剖面、體積小、重量輕等特點,適合作為共形陣天線單元;第二,無人機探測雷達兼顧主被動探測模式,在被動探測情況下,由于不明確被探測目標發(fā)射電磁波的極化形式,采用圓極化接收天線可以克服極化失配的問題,保證可以接收到被探測目標的信號。
4 下變頻接收模塊
下變頻接收模塊的作用是為數(shù)字處理器提供方位維波束合成的中頻信號[7]。經(jīng)分析,該下變頻模塊包括下變頻接收通道和校準網(wǎng)絡。下變頻通道對陣列俯仰維子陣接收到的信號進行放大、濾波、下變頻得到中頻信號。校準網(wǎng)絡的作用是對各個接收通道進行幅相校準,以確保后端數(shù)字處理器可以準確合成波束。下變頻模塊原理如圖2所示。
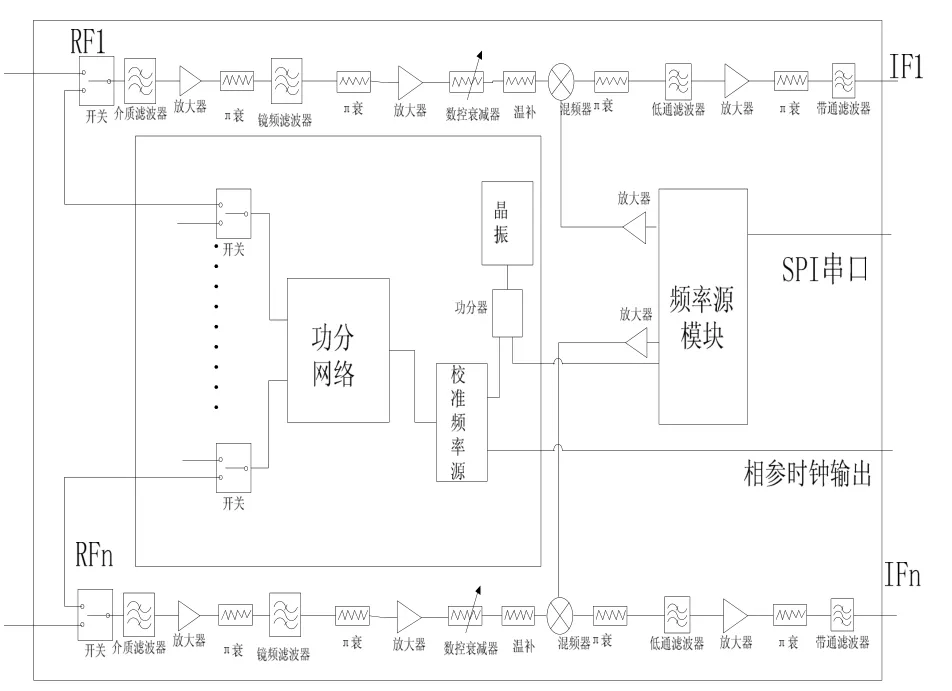
圖2 下變頻模塊原理圖
4.1 下變頻接收通道
接收通道采用一次下變頻結構,通過對信號進行濾波、放大下變頻后得到相應的中頻信號。該下變頻模塊輸入信號頻率為2.4GHz到2.483GHz跳頻信號,跳頻步進為 10MHz,根據(jù)后端 AD采樣要求,輸出中頻信號頻率為70MHz,中頻帶寬14MHz。設計下變頻接收通道時要注意以下幾點。
(1)外界干擾信號。首先輸入頻率在2.4GHz附近,這一頻段外界干擾信號比較多,需要在前端采用預選濾波器對干擾信號進行抑制;其次,一次下變頻結構中存在的一個重要問題是鏡像干擾,鏡像頻率與有用頻率下變頻后得到相同的中頻,鏡像頻率是需要抑制的,針對鏡像干擾問題,選擇采用帶寬盡量窄、帶外抑制較高的鏡像抑制濾波器對其進行抑制。
(2)噪聲系數(shù)與靈敏度。噪聲系數(shù)大小反映接收通道內部噪聲的大小,靈敏度反映接收通道對小信號接收能力的強弱,它們之間的關系[8]可由(1)表示。

為通道噪聲系數(shù),BW為信號帶寬,為識別系數(shù),從(1)式中,可以中看出噪聲系數(shù)越小,接收通道的靈敏度越高。所以在設計接收通道的過程中應盡可能減小噪聲系數(shù),系統(tǒng)級聯(lián)噪聲系數(shù)可由(2)表示。

從(2)式中可以看出前級噪聲系數(shù)大小對整體噪聲系數(shù)大小起決定作用,所以在前級采用低噪聲放大器可以有效保證接收通道整體噪聲系數(shù)。
(3)線性動態(tài)范圍。動態(tài)范圍反應接收通道可接收信號的范圍,動態(tài)范圍的上限取決于接收通道的1dB功率壓縮點,下限取決于接收通道的靈敏度,其關系如(3)式所示。

下變頻通道的設計過程中,在兼顧對小信號的探測能力的同時,考慮到滿足接收通道在輸入信號較強的情況下可以正常使用,加入了一個最大衰減量為 31dB 的數(shù)控衰減器。通過調整數(shù)控衰減器的衰減量可以擴展接收機的動態(tài)范圍,提高大信號處理能力。
(4)幅相一致性。多通道下變頻模塊為后端數(shù)字波束形成提供多路中頻信號,良好的幅相一致性可以保證數(shù)字波束正確合成,在通道中適當采用 π型衰減器和調相線可以對通道的幅度相位進行調整,從而確保通道的幅相一致性。
4.2 校準網(wǎng)絡
為了保證接收通道性能,確保后端數(shù)字波束正確形成,有必要對接收通道幅相進行監(jiān)測與校準。接收通道校正分為外場校正和內場校正,外場校正又可分為遠場校正和近場校正[9]。遠場需要一個大范圍的測試場和輔助天線,近場常采用近場探針,同時需要一個使探針精確掃描的復雜裝置;內場校正則是依靠接收通道內的設備進行檢測與校正,具體方法是通過通道內頻率源模塊產(chǎn)生測試信號,經(jīng)行波饋源或者開關矩陣將測試信號送入接收通道的輸入端。通常對于有源器件來說,每次開機環(huán)境參數(shù)及電壓波動都會對信號的幅度和相位產(chǎn)生影響,為保證工作條件一致性,每次都必須進行內場校正;而對于無源器件,每次開機對信號幅度相位影響是一致的,所以只需進行一次外場校正即可。
本方案采用內場校正法對下變頻接收通道進行校準,原理圖如2.14所示,校準時,跳頻源模塊產(chǎn)生內場測試信號,以一路通道作為基準,利用開關矩陣選擇相應的通道,比較通道之間的幅相值,通過通道內的衰減器和調相線對幅相值進行校準以達到指標要求。
5 仿真、測試結果
5.1 發(fā)射天線單元仿真結果
根據(jù)該射頻前端需求,設計套筒式單極子天線,天線內芯高度l=30.24mm,套筒長度L=29.34mm,套筒直徑A=11.97mm。仿真結果如下圖所示。
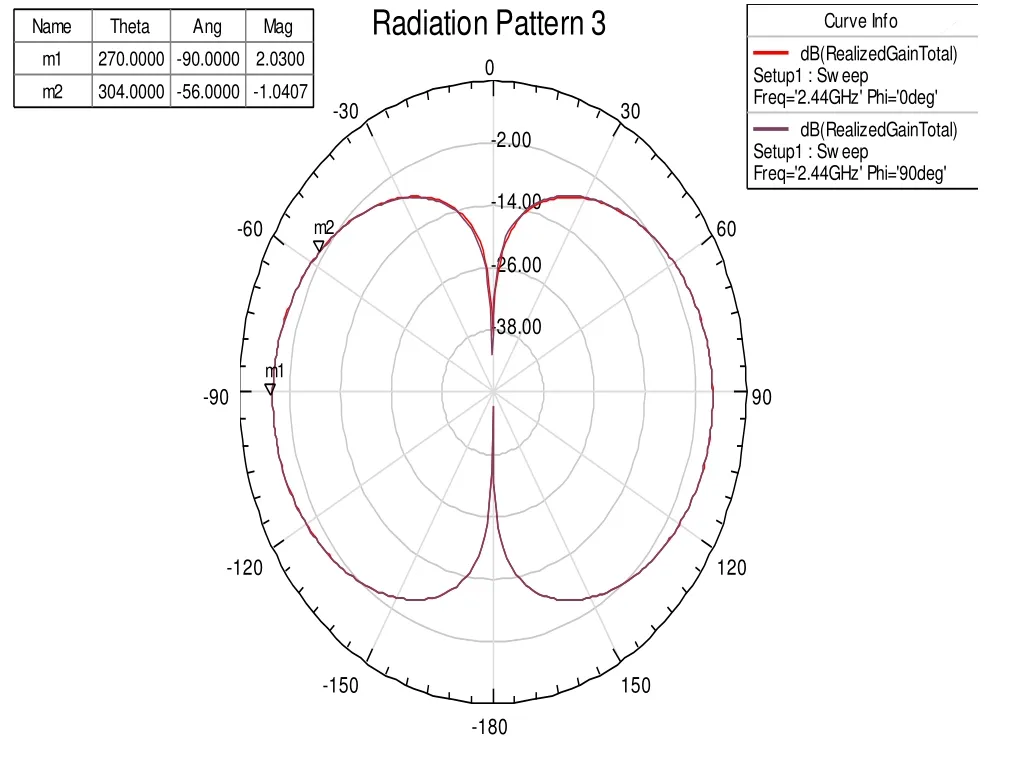
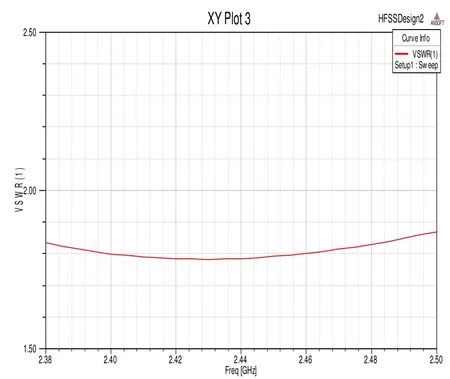
圖3 發(fā)射天線仿真結果
由仿真結果知,在工作頻帶內,天線駐波<2,具有良好的匹配,天線增益達到2dB。
5.2 接收天線單元仿真結果
根據(jù)該射頻前端需求,設計單饋圓極化微帶天線,微帶貼片尺寸為L×W=17.6mm×17.6mm,切角尺寸 a=1.5mm,饋電點距離中心的尺寸為,介質基板厚度,介電常數(shù),仿真結果如下圖所示。
由仿真結果知,在工作頻帶內天線駐波<2,具有良好的匹配,天線法向增益3.58dB。
5.3 下變頻模塊測試結果
下變頻模塊實物如圖5所示。采用頻譜儀、示波器、信號源、直流電源、噪聲系數(shù)分析儀等對下變頻模塊進行測試。其主要指標測試結果為:下變頻模塊工作頻率為S波段;下變頻通道噪聲系數(shù)<3,幅度一致性≤±1dB,相位一致性≤±5°,通道隔離度<-40dB,1dB壓縮點≥8.8dB,通道增益如表所示;校準網(wǎng)絡輸出功率,校準網(wǎng)絡幅度一致性≤±1dB,相位一致性≤±10°;頻率源相位噪聲:<-95dBc/Hz@1KHz、<-95dBc/Hz@10KHz。由測試結果和(1)、(2)、(3)式,該下變頻模塊的線性動態(tài)范圍優(yōu)于70.4dB。
圖5 下變頻模塊加工實物

表1 下變頻模塊增益測試結果
6 結束語
本文提出了低成本全電控陣列前端的設計方案,其為無人機探測雷達提供信號。該前端采用錐臺陣列可實現(xiàn)了較大空域的波束覆蓋,采用全電控的方法可實現(xiàn)了波束快速掃描。針對主動探測模式設計了全向發(fā)射天線,考慮到被動探測目標信號極化方式的未知性設計了圓極化接收天線。設計了為數(shù)字波束合成提供中頻信號的下變頻模塊,經(jīng)測試該模塊工作頻帶內具有良好的性能。
[1]許道明, 張宏偉.雷達低小慢目標檢測技術綜述[J].現(xiàn)代防御技術,2018, 4(1): 149-153.
[2]張光義, 趙玉潔.相控陣雷達技術[M].北京: 電子工業(yè)出版社, 2004.
[3]李陽.套筒天線寬帶化小型化研究[D].西安電子科技大學, 2014.
[4]周巍.北斗衛(wèi)星導航系統(tǒng)精密定位理論方法研究與實現(xiàn)[D].解放軍信息工程, 2013.
[5]約瑟夫松.共形陣列天線理論與應用[M].電子工業(yè)出版社, 2012.
[6]梁志明.雙頻圓極化微帶天線的研究[D].西安電子科技大學, 2012.
[7]郭崇賢.相控陣雷達接收技術: Receive techniques for phased array radar[M].國防工業(yè)出版社, 2009.
[8]Merrill I.Skolnik, 左群聲.雷達系統(tǒng)導論[M].電子工業(yè)出版社, 2014.
[9]邱文杰, 楊超.DBF系統(tǒng)的通道校正技術[J].電子科技大學學報, 1992,(6): 593-601.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25