線束激光導引式運輸車控制系統的設計*
2018-09-20 01:11:48
機械制造 2018年9期
青島理工大學機械與汽車工程學院 山東青島 266520
1 設計背景
激光導引式運輸車不需要鋪設導引軌道,以技術優勢超越了其它導引運輸設備。傳統的激光導引式運輸車通過行走路徑附近的標志反射板接收激光掃描器發射的激光信號[1],從而確定車輛的所在位置,進而完成行走和校正[2]。但激光導引裝置安裝較為煩瑣,作業距離近,工作效率低。針對這一問題,筆者設計了線束激光導引運輸車控制系統,可遠距離作業,滿足車間與車間之間的物料轉運。運輸車直線輸送運動精度高,室內外運行抗干擾能力強,運行速度可以達到2 m/s。
2 控制系統整體方案
2.1 運輸車總體布局
筆者結合運輸車的運動軌跡和工作模式,并且對比大量常規驅動布置模式[3],將驅動底盤設計方案選定為單動力輪驅動轉向[4]和兩后輪自由支撐式,整體結構如圖1所示。車體由單動力輪牽引行進,兩后輪為隨動輪,不需要像差速驅動控制那樣考慮電機配合的問題[5-8]。整車所實現的動作相對簡單,運行可靠,控制容易,造價低。動力輪是集驅動轉向于一體的模塊,集成了驅動電機、轉向電機、限位接近開關、行走編碼器、轉向電位計、安全制動器、驅動輪等。車體的最前方設置激光位置傳感器,車體前方和兩側配有三個障礙傳感器,中間部位放置鋰電池組,為電機和其它控制器提供直流電源。
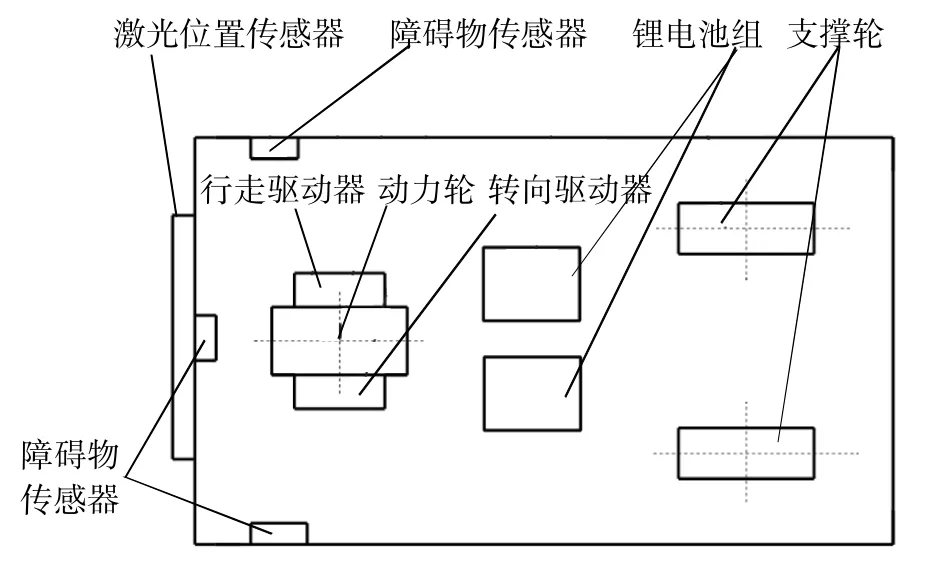
▲圖1 運輸車整體結構
2.2 控制系統結構
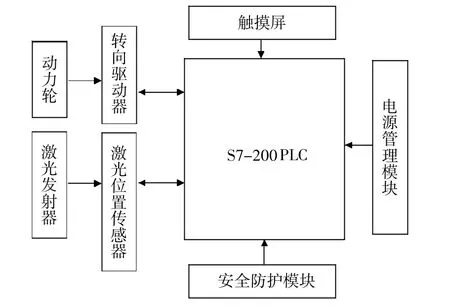
▲圖2 控制系統組成
控制系統由可編程序控制器(PLC)[9]、電源管理模塊、安全防護模塊、動力輪、轉向驅動器、激光發射器、激光位置傳感器等組成,如圖2所示。綜合考慮系統所需的數字量和模擬量輸入輸出點數、擴展能力、電源需求、預留空間、通信功能、編程靈活度等,選定西門子S7-200系列PLC進行控制[10-12]。各種傳感器和檢測裝置的信號傳送給PLC處理后,再通過程序梯形圖來控制執行部件。觸摸屏選擇與PLC高度兼容的西門子SMART 700 IE。安全防護模塊中設置避障傳感器,運輸車的最前端邊緣處設置機械防撞條,起到防護作用。
2.3 線束激光導引與循跡
實際作業時,運輸車前方遠距離處預先設置激光發射器并整平,所發出的線束激光沿直線傳輸,并標記在運輸車前端的激光位置傳感器上。傳感器上橫向堆疊布置感光元器件,增大激光響應面積。傳感器上的感光點均勻布置,線束激光打到不同的感光點,表示運輸車距離預定線路的偏離程度不同。專用電路對傳感器檢測到的偏離信號進行處理并輸入至PLC,經比例積分微分(PID)模塊運算處理,結果用來實時判別運輸車的當前位置和偏離程度,為控制系統下一步的行走、轉向與校正提供決策依據。行走校正如圖3所示,圖中實線為運輸車發生瞬時偏離的狀態,虛線為經過控制系統校正完成的狀態,此時線束激光標記在位置傳感器的中間感光點,說明此階段運輸車行走校正完成。

▲圖3 行走校正示意圖
3 控制系統硬件
3.1 行走驅動電機參數計算
運輸車的行進主要靠行走驅動電機,根據實際作業中運輸車的質量、最大載質量及最大行駛速度確定行走驅動電機的設計參數[13],見表1。

表1 行走驅動電機設計參數
具體參數運算如下。
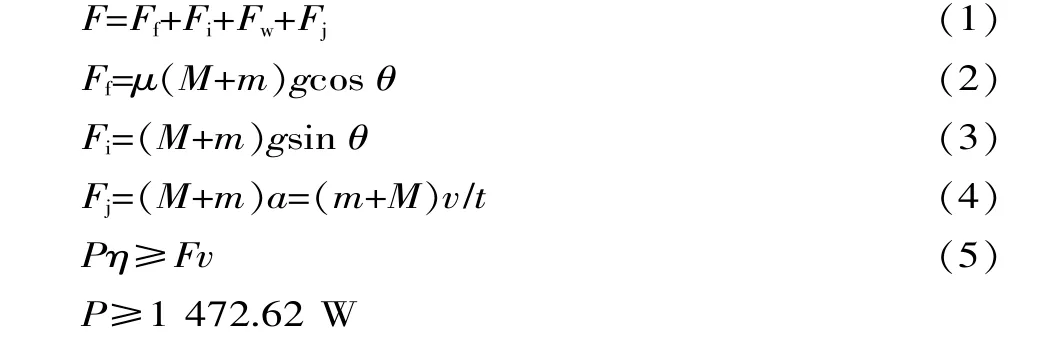
式中:F為運輸車總牽引力;Ff為滾動阻力,由輪胎與路面變形引起;Fi為坡度阻力,上坡時與整車前進方向相反,阻礙行駛;Fw為空氣阻力,數值較小,可忽略;Fj為慣性阻力,運輸車由靜止加速到勻速狀態時需要克服車重和負載的慣性力;μ為滾動阻力因數,受車速影響較大,資料表明v<50 km/h時變化較小,綜合不同路面阻力因數,μ選定為0.02;θ為爬坡角度,取5°;a為運輸車加速度;Pη為運輸車實際額定牽引功率;P為運輸車功率。
結合以上計算和實際工況,選取行走驅動電機為功率1 500 W,轉矩為4.8 N·m。動力輪減速精度高,運行平穩,噪聲低,各部件安全防護嚴格,搭配直流無刷驅動器,整體滿足設計要求。
3.2 轉向電路
在運輸車運行過程中,若動力輪偏離預定直線路徑,則通過直流無刷轉向電機實時調整控制,由此設計了如圖4所示轉向電路。運輸車采用電池作為能源,電池的電壓通常不穩定,在使用時電壓會波動,因此設計了直流穩壓模塊,將電池的電壓穩定后再供給 PLC。PLC的Q0.0和 Q0.1接口具有雙重輸出功能,轉向電路使用PLC的Q0.1接口,通過固態繼電器連接轉向電動機驅動器的FR方向控制信號,從而控制電機的轉動方向,PLC與驅動器之間通過固態繼電器控制,工作更加可靠,控制功能更容易實現。
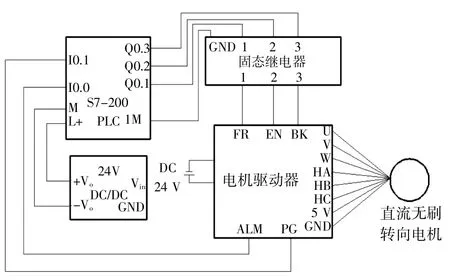
▲圖4 轉向電路
4 控制系統軟件
4.1 PLC控制流程圖
綜合運輸車的實際作業功能和PLC的控制特點,采用模塊化設計理念,繪制PLC控制流程圖,如圖5所示。流程圖系統初始化主要是對行走驅動執行部件、激光信號、前方障礙物和整機電源進行檢測,一旦檢測異常,則報警停車重檢。運輸車主要用于直線運輸作業,在轉彎時采用其它輔助導引完成,不再贅述。
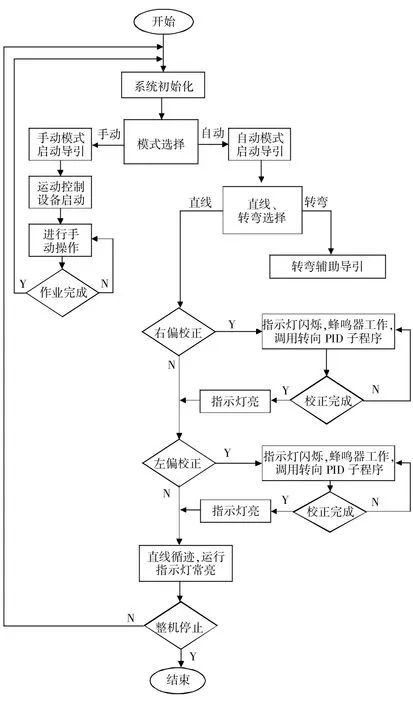
▲圖5 PLC控制流程圖
4.2 人機交互界面
人機交互界面設計采用WinCC flexible編程軟件,具有前瞻性好、專用性強、透明性高、靈活性好的特點。在實際編程時,遵循人機交互界面的友好性原則,統籌兼顧PLC和觸摸屏變量地址的一致性,同時保證運行參數的安全性,設置賬戶級別和參數修改權限[14]。以自動模式為例,最終設計的人機交互界面如圖6所示。

▲圖6 人機交互界面設計圖
5 試驗結果
經過前期控制系統設計,所研制的線束激光導引式運輸車試驗樣機如圖7所示。經過試驗證明,運輸車直線運行平穩,循跡能力良好,精度較高,抗干擾能力強,滿足實際作業要求。

▲圖7 運輸車試驗樣機
6 結束語
線束激光導引式運輸車控制系統通過對動力輪驅動轉向一體化單元的合理運用和布置,采用了新型激光導引模式。通過可靠性更高的核心控制器配合觸摸屏,實現了運行參數的實時監控和設置,作業模式的轉換柔性高,彌補了傳統激光導引模式的不足,為高精度遠距離工業運輸提供了參考。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
現代裝飾(2020年7期)2020-07-27 01:27:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
