車門限位器仿真與扭矩試驗研究
2018-09-20 01:11:56羅漢明付王梁
機械制造 2018年9期
□ 周 毅 □ 羅漢明 □ 付王梁
1.同濟大學新能源汽車工程中心 上海 201804
2.同濟大學汽車學院 上海 201804
1 研究背景
車門限位器是車門總成的一個關鍵部件,直接影響開關車門的舒適性、車門開關力的大小、車門壽命,以及噪聲、振動與聲振粗糙度性能等。現在國內針對車門限位器的設計指導資料較少,更多的是通過大量試驗來達到要求。何睿等[1]通過作圖法設計了拉帶式車門限位器,黃明菲[2]、劉遺勛[3]、王延偉等[4]對拉帶式車門限位器拉帶的布置和軌跡進行了說明和研究。而針對限位器的形狀設計,由于技術難度較大,目前僅是理論分析較多。汽車行業競爭激烈,應用計算機輔助工程技術中的多體動力學仿真技術,可以大大降低開發成本和縮短開發周期。因此,合理利用計算機輔助工程軟件如Virtual.Lab Motion等來指導車門限位器的設計,是值得研究的課題。
2 車門限位器建模
多體動力學仿真軟件一般將多體系統定義成四個部分的代數-微分方程,具體為部件、約束、力和自定義[5]。確定限位器各零件尺寸和位置參數,在幾何建模模塊中建立各零件的幾何模型,包括限位臂、限位滑塊、限位盒等。限位臂是限位器中最主要的零件,限位臂的形狀直接決定了車門開關過程中的擋位,以及開關門的力矩大小。由于受到限位盒尺寸的限制,為避免在運動過程中限位臂與限位盒之間出現運動干涉,限位臂的軌跡和形狀會變得較為復雜。限位臂軌跡如圖1所示,圖1中A點為車門鉸鏈的旋轉中心,B點為限位臂的旋轉中心,C點為限位盒內滑塊的中心代表車身代表車門代表限位臂初始段的軌跡,作代表限位盒。車門鉸鏈軸線與限位臂軸線距離車門鉸鏈軸線與限位塊中心距離夾角為138°。限位器的理想軌跡為復雜曲線,難以正常獲取,而按照單元逼近法[6-10],可以將限位臂軌跡劃分為幾段進行擬合。筆者根據車門的開關門角度將限位臂軌跡劃分為若干段來獲得其擬合軌跡。

▲圖1 限位臂軌跡示意圖
在確定好限位臂的軌跡及輪廓后,需要確定限位臂厚度、凹槽位置、凹槽深度等參數,并增加其它附屬結構,最終建立限位臂模型。在建立裝配關系前,需要建立一個固定不動的地面,代表相對不動的車身。地面與限位臂和車門均為旋轉副連接,因此只需要在地面上在對應的位置建立兩個坐標系,限位臂和限位盒通過這兩個坐標系與地面裝配。裝配之后在Virtual.Lab Motion軟件中定義裝配體及各關鍵零件的結構參數,包括運動關系、慣性參數、力單元和接觸單元等。限位器裝配圖如圖2所示。
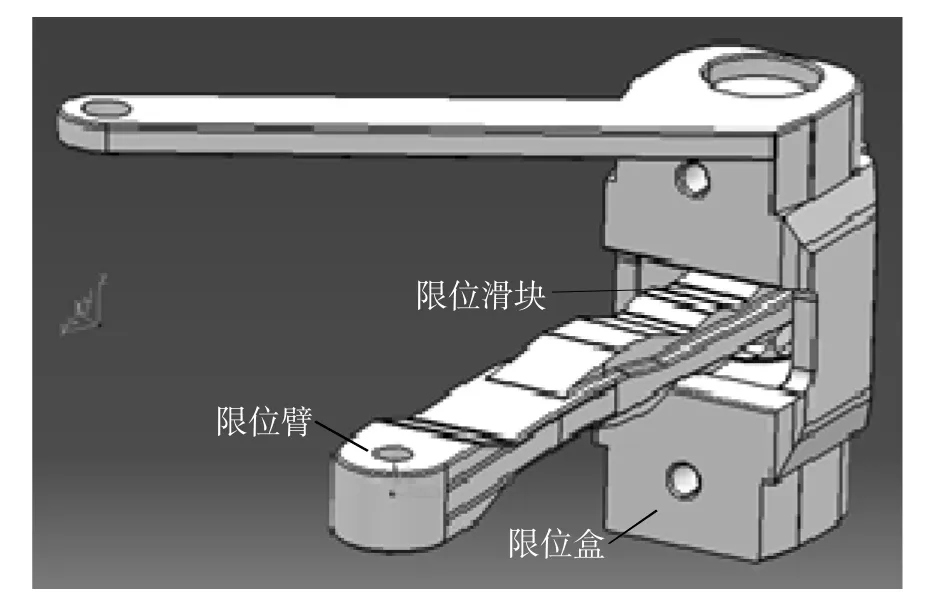
▲圖2 限位器裝配圖
3 限位器多體動力學模型優化
3.1 限位器仿真
在初步建立的限位器模型基礎上,進行限位器整體多體動力學仿真[11]。型號1限位器限位臂各擋位凹槽形狀尺寸見表1。仿真工況為開門和關門兩個工況,初始系統限位盒保持5 s靜止,使限位滑塊和限位臂充分接觸,達到平衡狀態,之后驅動限位盒以1(°)/s的角速度勻速轉動。
關門和開門工況下,限位盒驅動扭矩隨時間變化曲線分別如圖3、圖4所示。由圖3、圖4可知,最初5 s限位盒的靜止狀態已經使限位臂與限位滑塊之間充分接觸,達到了穩定狀態。5 s時限位盒由靜止突然開始勻速轉動,因此該時刻會出現一個較大的驅動力矩,對于這一力矩,筆者不進行分析。

▲圖3 關門工況限位盒驅動扭矩隨時間變化曲線

▲圖4 開門工況限位盒驅動扭矩隨時間變化曲線
圖3、圖4中,正扭矩表示需要推動限位器越過各擋位處凹槽的斜面,負扭矩表示凹槽的斜面會推動限位滑塊自動滑入凹槽內。對于負扭矩,筆者不進行研究。從曲線中可以獲得開關門過程中各擋位所需的最大扭矩,以及所對應的時間,并可推出對應的開關門角度,并設車門關閉時的角度為0°。表2為各擋位仿真結果。
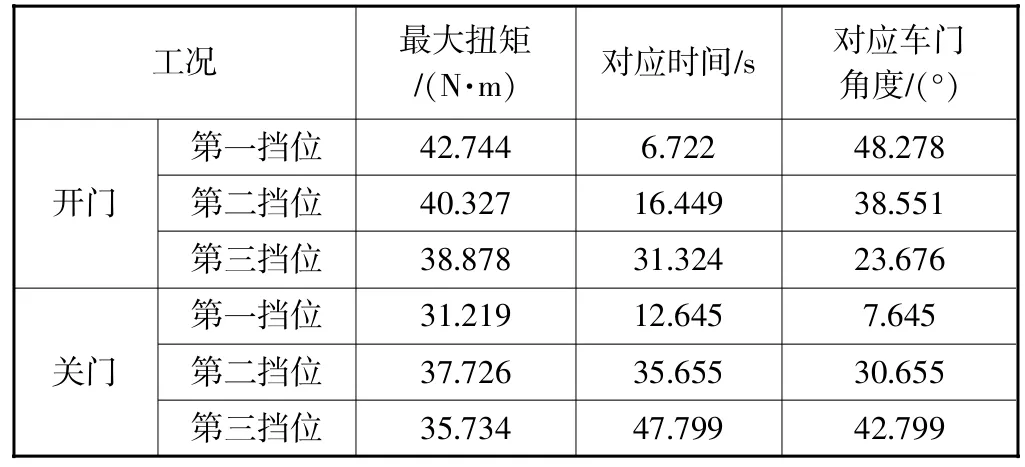
表2 各擋位仿真結果
最大扭矩出現時所對應的限位滑塊和限位臂接觸位置如圖5所示,可見出現最大扭矩的位置均為斜面末端接近限位臂最厚位置處,此時彈簧長度最短,施加的壓力最大,需要最大的扭矩來克服限位滑塊與限位臂之間接觸所產生的阻力。

▲圖5 最大驅動扭矩對應限位滑塊與限位臂位置
3.2 限位器開關門扭矩試驗
選取三款同類型且只有限位臂形狀有一定差異的限位器,分別設為型號 1、 型號 2、型號3,每款限位器各5個,共對15個限位器進行試驗。其中,型號2只有兩個擋位,型號1和型號3均有三個擋位。限位器試件如圖6所示。
測量時,先將限位滑塊置于關門第一擋位的凹槽處,即使夾具初始位置在車門最大開啟狀態。推動限位器運動,推動過程保持緩慢且勻速。推過限位器關門第一擋位后,使滑塊緩慢滑入第二擋位的凹槽中,通過表盤上的指針讀取限位滑塊通過關門第一擋位凹槽所產生的最大扭矩。依次類推,分別對限位器關門三個擋位和開門三個擋位進行測量,獲得各擋位對應的最大扭矩值,并進行記錄。
對每款5個限位器試件測得的各擋位扭矩數據求取平均值,見表3。

▲圖6 限位器試件
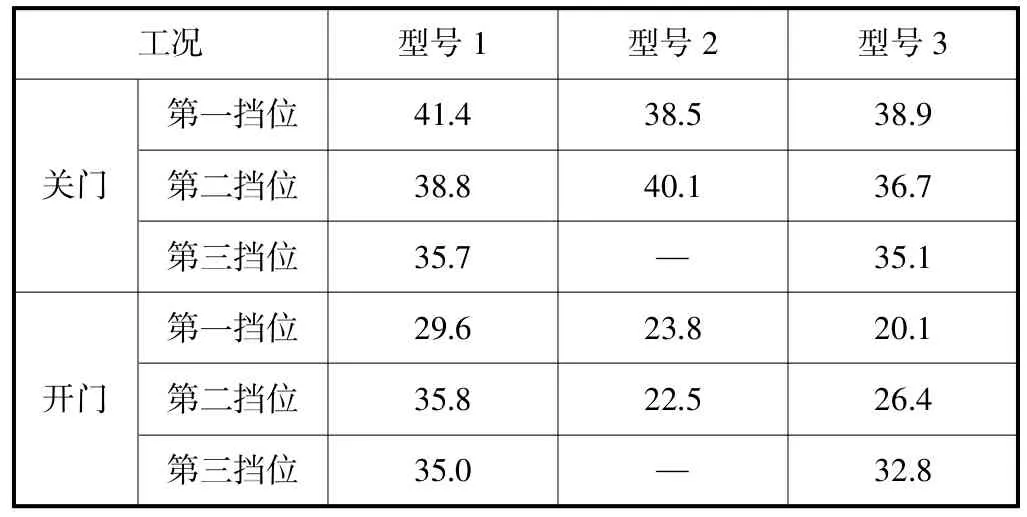
表3 限位器各擋位扭矩測量平均值 N·m
3.3 仿真與試驗對比
對三款限位器各擋位獲得的仿真驅動扭矩,與扭矩試驗測得的扭矩測量平均值進行比較,得到相對偏差,見表4。

表4 限位器各擋位仿真驅動扭矩與試驗扭矩相對偏差
仿真扭矩和試驗扭矩的相對偏差小于10%,表明仿真結果符合要求。由此可見,通過筆者建立的動力學模型及勻速旋轉限位盒工況,可以獲得較準確的限位器實際所需扭矩。
4 驅動扭矩影響因素分析
4.1 影響因素選擇
針對影響驅動扭矩較大的因素,初選限位臂厚度H、凹槽深度D、斜坡角度β、斜坡頂部圓角半徑R1及滑塊上圓角半徑R2這五個影響因素,如圖7所示。
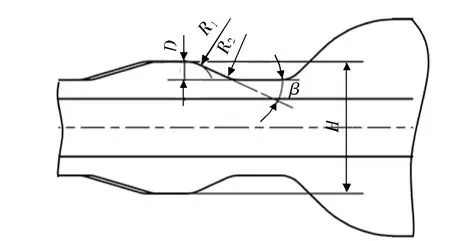
▲圖7 驅動扭矩影響因素
為了判別初選因素是否會對驅動扭矩產生較大影響,采用控制變量法。為了盡量減小限位臂與限位盒之間的接觸對驅動扭矩的影響,選擇該接觸產生的扭矩與限位器驅動扭矩比值最小的關門第二擋位作為仿真工況。
通過控制變量法對初選的影響因素進行仿真對比,最終判斷H、β、R1和R2會對驅動扭矩產生較大的影響,并做進一步分析。由于D不會對驅動扭矩產生較大影響,因此筆者不再進行研究。
4.2 正交設計與分析
確定的影響因素有H、β、R1和R2四個,由于分析的因素較多,如果對各因素的所有水平都進行全排列搭配組合,那么所要進行的仿真數量將非常龐大。而正交設計是針對多因素試驗的一種有效解決辦法,可以在全排列試驗中挑選出有代表性的部分組合,且仍然保持著均勻和整齊的特點,可以有效減少組合數量,但仍能從中分析獲得各個因素的影響規律[7-9]。
確定研究的因素數量為四個,各因素的水平數量和水平范圍則根據限位器對于各參數的限制范圍,以及進行試驗的限位器試件所使用的參數數值確定,以方便后續通過試驗驗證分析結果。最終確定的因素水平表見表5。
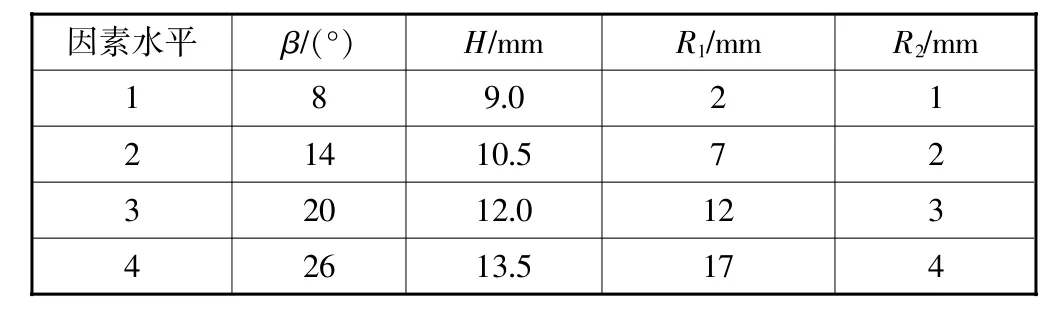
表5 因素水平表
根據正交表的設計規律[10],試驗需要的正交仿真組別數為16組,見表6。
繼續使用前文所述的限位器模型和仿真工況進行仿真,獲得關門第二擋位置處的驅動扭矩。凹槽深度D保持2 mm不變,其余參數數值根據試驗正交表對應的組合逐一調整后進行仿真,基于獲得的驅動扭矩曲線得到驅動扭矩的最大值,并最終得到16次仿真試驗的扭矩,見表7
通過對正交設計獲得的仿真結果進行直觀分析,可以獲得各因素對于仿真結果的影響趨勢。將各個因素每個水平對應的仿真驅動扭矩進行相加,如將所有的β為8°的仿真驅動扭矩進行相加,記作K1,則K1=14.059+15.230+15.162+15.763=60.214 N·m。 同理,β為14°的結果記作K2。依次類推,還可以獲得其它因素對應的K值。將獲得的K值除以各水平出現的次數,得到平均值,記作k。各因素k值見表8。
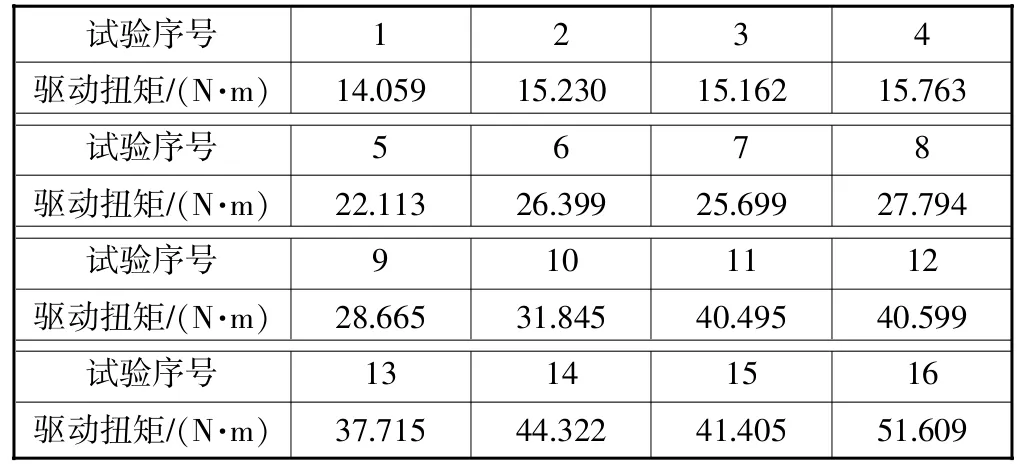
表7 仿真試驗驅動扭矩
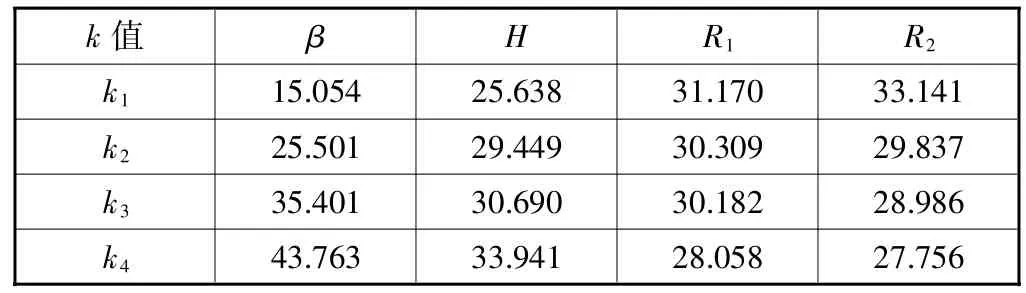
表8 各因素k值 N·m
一個因素k值的變化反映了該因素各水平對于仿真結果的影響情況,可以通過k值獲得各水平的影響趨勢圖。各因素對驅動扭矩的影響如圖8所示。

▲圖8 各因素對驅動扭矩的影響
從圖8中可以發現,斜坡角度對于驅動扭矩的影響最大,而限位臂厚度、斜坡頂部圓角半徑和滑塊圓角半徑的影響情況基本相近。
4.3 回歸分析
通過回歸分析,可以確定仿真結果的回歸方程,對不同參數對應的驅動扭矩結果進行預測。
4.3.1 因素水平編碼
因素水平編碼將各因素的水平進行線性變換,如對斜坡角度β進行線性變換,編碼記作Z1,變換式為:

式中:β0為斜坡角度四個水平的平均值;Δβ為斜坡角度變化間距。
由式(1)求得斜坡角度 β 為 8°、14°、20°、26°時對應的 Z1編碼值依次為-1.5、-0.5、0.5、1.5。
與式(1)相類似,其余因素的變換式為:

式中:H0為限位臂厚度四個水平的平均值;ΔH為限位臂厚度變化間距。

式中:R10為斜坡頂部圓角半徑四個水平的平均值;ΔR1為斜坡頂部圓角半徑變化間距。

式中:R20為滑塊圓角半徑四個水平的平均值;ΔR2為滑塊圓角半徑變化間距。
4.3.2 一次回歸正交表
將各因素對應的編碼代入原試驗正交表,獲得一次回歸正交表及仿真扭矩,見表9。

表9 一次回歸正交表及仿真驅動扭矩
一次回歸方程為:

根據式(1)~式(4),計算并代回式(5),得:

4.3.3 一次回歸方程驗證
為了驗證方程的準確性,并判斷方程是否能夠預測限位器實際的驅動扭矩值,筆者將進行驅動扭矩測量試驗的三款限位器各擋位參數代入一次回歸方程,獲取驅動扭矩值,然后同實際測得的驅動扭矩值進行比較,得到回歸方程計算值與試驗測量值的相對誤差,見表10。
從對比結果可以發現,回歸方程計算得到的驅動扭矩值與試驗測量值在某幾個擋位關門動作時存在較大的誤差,且出現誤差較大的擋位其斜坡角度均較大,且不小于20°。而其余擋位的回歸方程計算值與測量值的相對誤差均較小,在8%以下。分析原因,可能是因為在斜坡角度較大時,限位器驅動扭矩的變化隨斜坡角度的變化已經不滿足線性關系。

表10 驅動扭矩回歸方程計算值與試測量值相對誤差
為了修正在斜坡角度較大時引起的誤差,筆者針對斜坡角度β不小于20°的情況,對一次回歸方程進行修正,重新獲得一個適用于斜坡角度β不小于20°的一次回歸方程。為此,重新選取大角度的斜坡角度水平,再次進行正交設計和仿真。選擇的斜坡角度β水平為 20°、22°、24°、26°,其余因素的水平數和水平數值保持不變,重新獲得的一次回歸正交表和仿真獲得的驅動扭矩值見表11。
求得新的一次回歸方程為:

即:

對斜坡角度β不小于20°的幾個擋位重新進行比較,得到新回歸方程計算值與試驗測量值的相對誤差,見表 12。
根據仿真經驗,從對比結果中可以發現,計算值和測試值的相對誤差有了明顯降低,均在10%以內。其中型號3的關門第一擋位驅動扭矩偏差為10.0%,較大,這可能是由于型號3的實際限位臂模型與仿真使用的限位器模型存在一定差異引起的。
最終獲得限位器驅動扭矩的數學模型為:


表11 新一次回歸正交表及仿真驅動扭矩

表12 驅動扭矩新回歸方程計算值與試驗測量值相對誤差
5 結論
根據實際限位器模型和動力學仿真要求,建立了限位器動力學模型。通過限位器驅動扭矩測量試驗與仿真結果相對比,驗證了限位器動力學模型和仿真方法的準確性。
著重討論了限位臂厚度、斜坡角度、斜坡頂部圓角半徑和滑塊圓角半徑對驅動扭矩的影響,通過正交設計和回歸分析,建立了限位器扭矩的數學模型,并初步驗證了回歸方程的準確性。
