仿生鰩魚水下機器人的設計與仿真分析*
2018-09-20 01:12:08
機械制造 2018年9期
寧波大學機械工程與力學學院 浙江寧波 315211
1 設計背景
隨著陸上資源的不斷緊缺和對海洋資源開發的強烈需求,水下推進器迅速發展。然而,目前進行海洋探索的水下推進器大多以螺旋槳為推進裝置[1],存在體積大、能耗高、噪聲大和機動性差等缺點。以胸鰭波動作為推進模式的鰩科魚類,如蝠鲼、牛鼻鲼等,在機動性、推進效率及適應能力等方面具有優越性[2],因此,對鰩魚的研究越來越引起人們的關注。
魚類有多種運動形態,仿生學研究人員依其推進方式的不同,主要分為BCF(身體/尾鰭)和MPF(中央鰭/對鰭)兩類模式[3]。鰩魚是典型的MPF模式魚類,目前國內外對仿生鰩魚的研究已經有了很大進展。
楊少波等[4]以牛鼻鲼為研究對象,胸鰭兩側通過八個舵機進行驅動,模仿胸鰭波動運動模式魚類,已基本達到預期效果。王田苗等[5]也以牛鼻鲼為研究對象,加入了尾鰭,可實現自由轉向,游動性能有了極大提高。王揚威等[6]以蝠鲼為研究對象,以形狀記憶合金為驅動材料,體型小巧,運動無噪聲,但驅動力不足,游動速度較慢。
Low等[7]以蝠鲼為研究對象,通過多舵機驅動,可以實現和鰩魚基本一致的自主游動。Chen等[8]以鰩魚為研究對象,以鋯鈦酸鉛無機材料作為驅動,可以很好地實現模仿鰩魚的游動形態,但游動速度比較慢。Evo Logics公司[9]以人造肌肉技術研制了一款仿鰩魚機器人,采用氣動肌腱的驅動模式,能夠實現較好的運動。
目前,國內外在鰩魚的運動學研究[10]方面已經有了一定成果,筆者設計了一款仿生鰩魚水下機器人,建立其結構與運動學模型,并在此基礎上進行運動仿真。
2 鰩魚結構設計
鰩魚的種類有幾百種,可依據外形大致分為兩類:類三角形和橢圓形[11]。筆者以胸鰭波動模式類三角形鰩魚作為研究對象,其運動簡圖如圖1所示[9]。鰩魚通過寬大的胸鰭產生波形,波形向后傳遞推動水流向后運動,所獲得水流的反作用力即為前進的推力。
鰩魚在游動時,身體部分是不參與運動的,主要是通過胸鰭的波動來獲得推進。因此,結構設計的重點在于傳動構件及胸鰭的設計。
根據鰩魚胸鰭波動推進的運動特點,傳動構件的目的是將動力傳送到魚鰭位置,使魚鰭發生柔性變形,進而產生自前往后的傳遞波,來推動鰩魚的前進。為了使系統具有更好的傳動效率,采用擺動導桿機構作為魚鰭的驅動機構。擺動導桿如圖2所示,以C點作為坐標原點建立直角坐標系,其中為為A、C兩構件之間的距離為A、B兩構件之間的距離為C、B兩構件之間的距離,θ為桿與X軸正方向的夾角,桿與X軸正方向的夾角。
依據lCA+lAB=lCB,可得到:

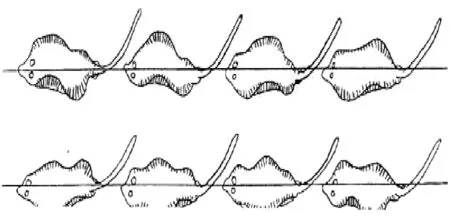
▲圖1 鰩魚運動簡圖
將式(1)展開,并按照等式兩邊實部與虛部分別相等的原則,可得到:

由式(2)、式(3)可得到:

對式(4)進行求導,可得到:

從圖2及式(5)可以得到:當BC桿運動到上下極限位時,速度最小,機構的傳動效率最高;當BC桿運動到中間位置時,速度最大,傳動效率最低。
根據擺動導桿機構的運動原理,設計出如圖3所示仿生鰩魚內部結構。傳動構件采用曲軸形式,位置按固定方向以60°相位差依次發生偏轉,構成一個旋轉周期。鰩魚的胸鰭通過鰭條構成骨架,模仿真實鰩魚的胸鰭形狀,采用對稱的設計模式,每側胸鰭各包含六根鰭條,并且鰭條的長度自前往后依次遞減。結構中,前面的底板主要起固定舵機的作用,后面的底板主要起固定各軸的作用。曲軸與底座焊接在一起,同時底座固定在舵機上,實現舵機的轉動,并帶動曲軸轉動,進而實現鰭條的上下擺動,六根鰭條的端點連線近似為一個周期的正弦曲線。

▲圖2 擺動導桿示意圖
為了與真實鰩魚的運動相符,達到軟體機器人的效果,魚鰭之間采用硅膠薄膜相互連接,使鰭條的擺動帶動軟體硅膠薄膜起伏波動,從而實現魚鰭整體波動。仿生鰩魚整體結構如圖4所示。
3 鰩魚機構運動學仿真
為了驗證所設計仿生鰩魚機構的可行性,對機構進行運動學仿真。整個仿生鰩魚的機械傳動原理是依據擺動導桿機構,因此針對圖3所示模塊進行仿真即可。簡化模型,利用ADAMS仿真軟件取一根鰭條進行機構的仿真分析,如圖5所示。
設置舵機的轉速為5 rad/s,鰭條上下擺動方向為Y方向,取鰭條端部中間位置任意一點,初始位置y=40 mm,得到該點隨曲軸轉動時的位移變化情況,如圖6所示。由圖6可知,該點位置沿直線y=40 mm上下波動,上下位移變化量基本相同,呈周期性分布,說明鰭條可以實現上下對稱的往復擺動。
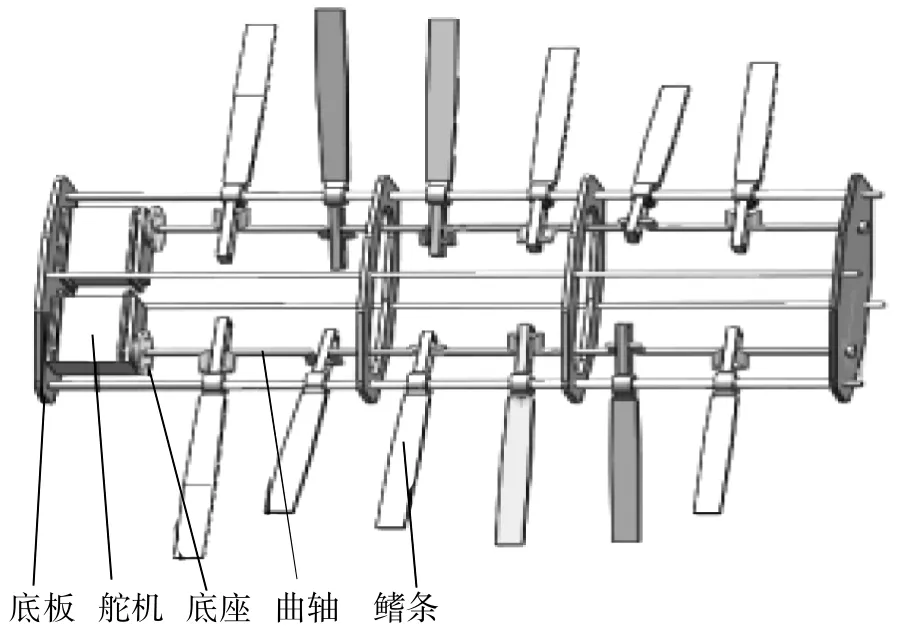
▲圖3 仿生鰩魚內部結構
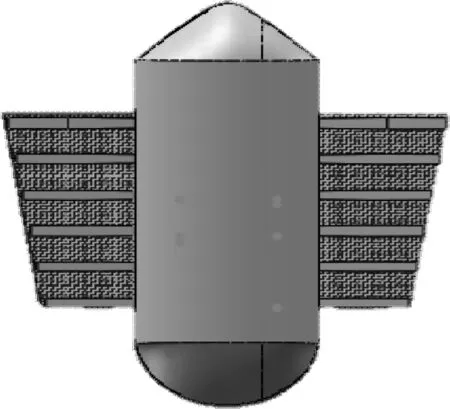
▲圖4 仿生鰩魚整體結構

▲圖5 仿生鰩魚機構仿真
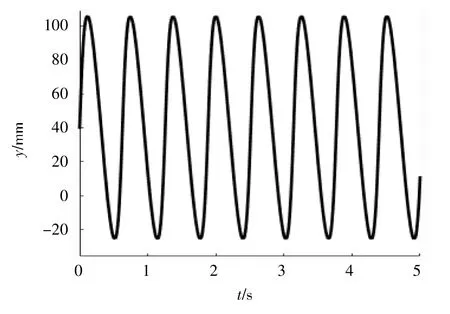
▲圖6 鰭條位移變化
圖7所示為舵機不同轉速時鰭條角速度ω的變化情況。通過試驗可知,鰭條的角速度隨時間呈周期性變化,隨著舵機轉速的增大,鰭條運動速度也在逐漸增大。而且當曲軸的軸頸運動到與鰭條滑槽垂直的位置時,鰭條正好運動到上下兩個極限位,即擺動角度θ最大,此時角速度為0。當運動到平行位置時,此時擺動角度為0,鰭條角速度最大。這與前文公式推導出的結論相符合,驗證了機構的合理性。
軸頸在滑槽中作圓周運動,其對滑槽的作用位置也在變化,因此導致鰭條的角速度變化并不是上下均勻對稱分布的。如圖8(a)所示,軸頸從上極限位運動到B位置的過程中,作用位置離鰭條轉動中心A距離越來越近,直至最近,使鰭條角速度較快地從0逐漸增大到最大。如圖8(b)所示,當軸頸從下極限位運動到B位置時,作用位置與轉動中心A的距離越來越遠,直至最遠,此時鰭條角速度也從0逐漸增大,但增大速度較慢。這是由于此過程中軸頸對滑槽的作用位置到轉動中心的距離大于上極限位到B位置過程中的距離,在舵機轉速恒定時,作用位置離轉動中心距離越近,鰭條運動速度越快,因此曲軸從下極限位運動到平行位置時的角速度要小于從上極限位運動到平行位置時對應的角速度。

▲圖7 舵機不同轉速下鰭條角速度
4 鰩魚魚鰭運動學建模與仿真
4.1 鰩魚魚鰭運動學建模
對魚鰭部分創建運動學模型,鰩魚的魚鰭運動以正弦波動形式傳遞[12],其運動學方程為:

式中:k=2π/λ;ω=2πf;x,y 為空間坐標系中魚鰭上任意一點坐標;t為運動時間;λ為行波波長;f為行波頻率;A為魚鰭波動的振幅。
仿生鰩魚運動時,通過擺動導桿機構將動力傳遞到鰭條上,鰭條上下擺動帶動魚鰭波動。因此,按照鰩魚的運動模式,對魚鰭進行運動仿真。由于魚鰭兩側對稱分布,因此只需要對一側魚鰭進行研究。
對魚體部分進行簡化,依據鰭條的排列形式及魚鰭的波動模式,按照與所設計的魚鰭結構1∶1的比例,將各鰭條之間以平滑的曲面相連,使六根鰭條構成一個波動周期的正弦曲面。魚鰭運動初始狀態的仿真模型如圖9所示。

▲圖8 軸頸與滑槽平行時位置示意圖
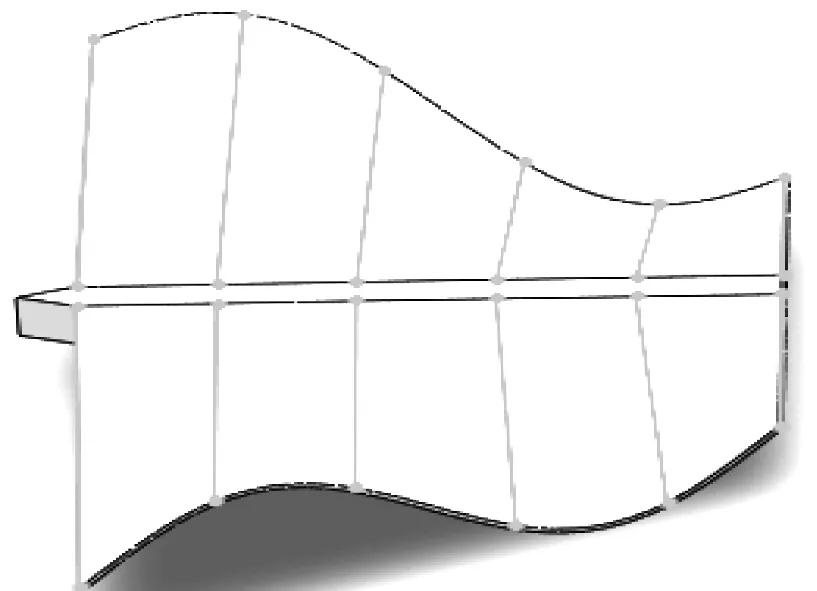
▲圖9 魚鰭初始狀態仿真模型
4.2 魚鰭運動過程中表面壓力分析
采用Fluent流體動力學仿真軟件進行鰩魚魚鰭的運動仿真,由于魚鰭在流體中以波動模式進行運動,根據運動學模型編寫自定義程序,在Fluent中通過接口進行編譯,使魚鰭按照正弦函數的形式進行運動。在Fluent中建立流場環境,并設置邊界條件,導入程序,對各參量值初始化,設定步數進行計算,直至步數完成,計算結束。完成后取一個周期的結果進行分析,可得到魚鰭運動過程中表面壓力變化分布云圖,如圖10所示,其中T為魚鰭的運動周期。
由圖10可看出,在魚鰭以最大振幅運動的一個周期中,運動波也隨之自前往后傳遞,以此按照正弦波動形式呈周期性運動。魚鰭上表面的高壓區域同樣隨波傳遞而變化,分布在魚鰭波動峰值附近,并且靠近魚鰭邊緣,說明此處流體對魚鰭的反作用力較大。魚鰭邊緣是鰩魚運動的主要動力來源,高壓區域隨魚鰭周期性波動也會周期性變化,從而實現魚鰭在流體中的有效運動。
4.3 魚鰭運動過程中附近流體壓力分析
由于鰩魚的運動主要靠兩側魚鰭的波動,而兩側魚鰭對稱分布,因此對一側胸鰭波動時周圍流體的情況進行分析。以z=0.1 m平面對流場進行截取,胸鰭周圍流體壓力變化云圖如圖11所示。由圖11可看出,胸鰭周圍的壓力分布與魚鰭表面壓力分布基本一致,當魚鰭部位壓力較高時,對應的周圍流體壓力也較高。另外,胸鰭上下方流體的壓力呈周期性變化,并且胸鰭背水面周圍流體壓力的變化始終大于迎水面周圍流體壓力的變化,符合鰩魚的運動規律。
5 結論
通過對波動推進式鰩魚特性進行分析,設計了一款仿生鰩魚水下機器人,并對所設計的機構進行運動學分析。依據鰩魚在水中的游動模式,建立了仿生鰩魚的運動學模型。又根據所設計的鰩魚結構,在Fluent軟件中創建鰩魚的仿真模型,通過編程仿真了魚鰭的運動,分析了魚鰭表面壓力分布及胸鰭附近流體壓力分布情況,驗證了波動魚鰭推進模式的可行性,為后續仿生鰩魚水下機器人樣機的建立提供了理論依據。
后續工作將依照已建立的數學模型,完成仿生鰩魚機器人的試驗裝置,通過試驗和仿真進行比較,同時增加動力學性能研究,得到影響鰩魚游動性能的更加全面的結論,對研究進行完善。
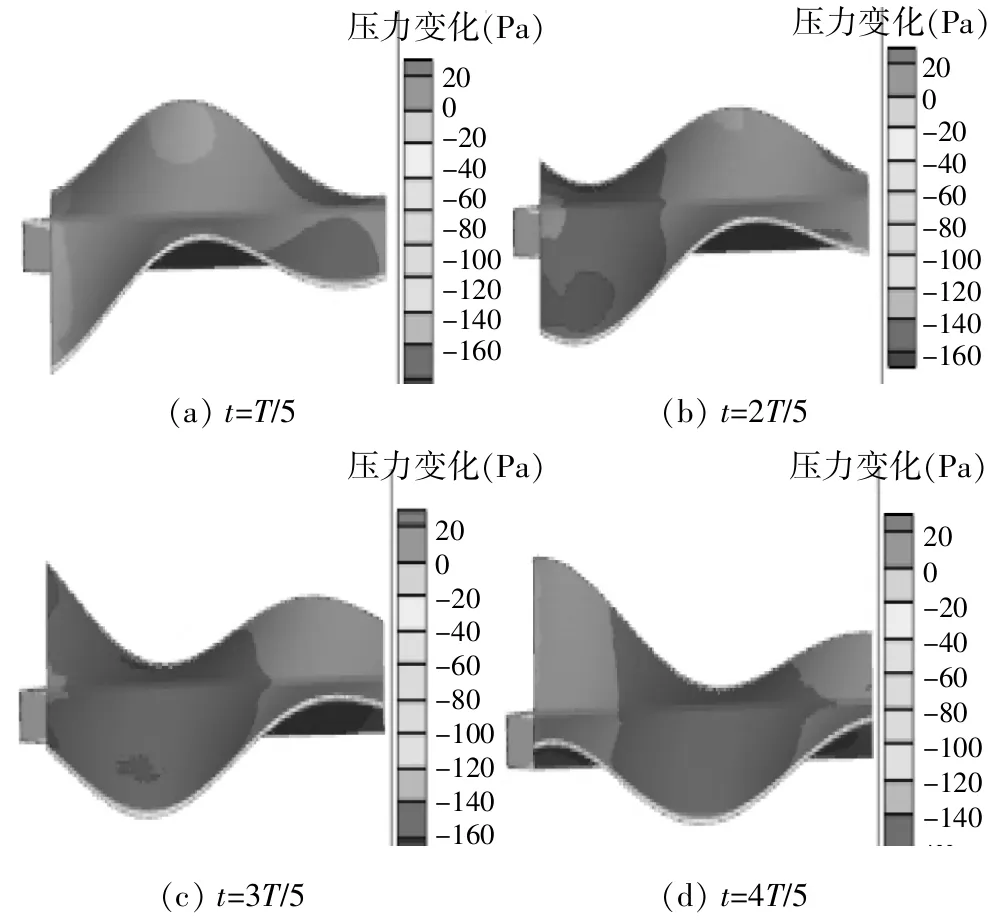
▲圖10 魚鰭運動過程中表面壓力變化分布云圖
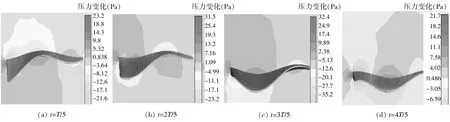
▲圖11 胸鰭周圍流體壓力變化云圖
