基于慧魚模具的菠蘿采集車設計
2018-09-21 07:52:08蔣冰瑤李毅舟
現代工業經濟和信息化 2018年11期
蔣冰瑤, 李毅舟
(武漢商學院, 湖北 武漢 430056)
引言
菠蘿因采摘難度大、種植地的地形地貌復雜,多采用人工采摘方式,且存在果實扎手、果實質量較大的問題,采摘費事費力,浪費大量人工。現有的菠蘿采集機械設計多分為兩種方式:一種為車型結構,使用農機進行菠蘿采摘;另一種為采摘機械手,能夠通過機械手上安裝的裝置切斷菠蘿莖部。兩種方式都能夠一定程度上降低人力需求,加大采摘效率,但也各有缺陷,如車型結構易損害菠蘿田地,采摘手仍需要人背負菠蘿果實。因此將兩種結構結合,選取其優點,最終設計出菠蘿采集車。該設計在完成采摘的同時,還能夠承載一定數量的菠蘿,同時搭載了轉向機構,更加靈活,能夠更好地適應地形地貌。
1 項目背景
水果采摘作業的耗時量、勞動強度、困難系數增加了產品的額外附加成本,因此保障水果采收產量的基礎上,降低收獲作業過程中的勞動力成本是產業增收的重要途徑。目前,國內菠蘿采摘作業基本為人工進行,自動化程度較低,采集時間較為集中。菠蘿果實長在菠蘿植株的中心上部,莖部較長,傳統采摘方式為人工掰斷菠蘿莖部,對勞動者要求較高,且大量耗費體力,果實表面的尖銳部分還可能傷害勞動者手部。
對于地上作物的收割,我國已有比較成熟的技術,因此綜合運用其理論和結構制成菠蘿采集車是可行的。
2 機械結構原理
2.1 特殊結構
2.1.1 采集車車身框架結構
菠蘿原產美洲熱帶和亞熱帶,是多年生草本植物,一般來說,采摘需保護其莖部,以便第二年菠蘿的生長。現在已有的幾種機械化菠蘿采摘設計如圖1所示。

圖1 采摘機械手
傳統菠蘿采摘,受果實質量較重、表面帶刺、植株生長較密集、枝條堅硬等因素限制,而現有的菠蘿采摘機械并不能較好地解決這幾個問題。采摘機械手仍需人工操作,消耗一定的人工,采摘車則會對地表進行一定的破壞,同時難以適應地形地貌[1]。
面對這一問題,結合農機發展現況,選用采集車車身框架結構,如下頁圖2所示。采集車利用車輪作為前行設備,能較好適應大面積菠蘿種植地的情況,適應連續性工作工況;同時,菠蘿采集場所為采集車下方,是依據菠蘿果實生長情況和種植分布情況而確定,既節約空間,也能保護地表植株二次生長。
尺寸的確定除考慮菠蘿植株的大小外,還需要考慮慧魚教具的特有性質,如不穩定性。框架結構不能過大,否則菠蘿的比例也要相應增大,車體零件數目增加,車輪所受壓力也大幅度增加,影響采集車功能的實現。
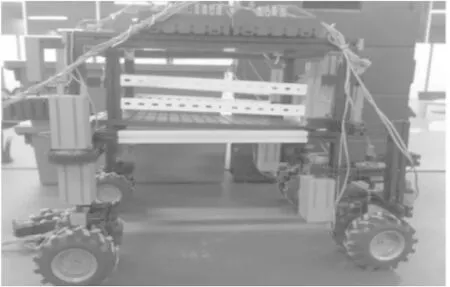
圖2 采集車車身框架結構實物圖
菠蘿的主要參數見表1。

表1 菠蘿實際參數 mm
選擇4:1的比例對菠蘿植株整體進行縮放,縮放之后的尺寸見表2。

表2 菠蘿縮放參數 mm
車體高度要大于菠蘿整體高度,為防止部分尺寸較大的菠蘿被鋸片切割模塊破壞,留有50 mm左右的空間,故采集車高度為250+50=300 mm。
采集車的寬度要能夠容納菠蘿及部分采摘、收集零件;為保證菠蘿采集車作業的連續性,需要將菠蘿采摘后暫時收納至車中采集籃內,故車體需要一定的長度,同時盡可能小,以保證不影響轉彎半徑。
最終確定的車體尺寸:高度為300 mm;寬度為210 mm;長度為300 mm。
2.1.2 前輪驅動結構
菠蘿采集車選用前輪驅動結構,通過一對嚙合的齒輪,將電機的旋轉運動從水平方向轉為豎直方向,同時,在前輪驅動部分設置有固定塊,確保齒輪間的嚙合,如圖3所示。
采用前輪作為驅動輪,選用慧魚教具中的編譯馬達帶動,其尺寸為60 mm×30 mm×30 mm。
選用編譯馬達的第八擋對前輪進行驅動,其轉速為1 800 r/min,前輪選用慧魚教具中的大輪胎,可以承受較大壓力,其直徑為80 mm,周長為s=πd=3.14×80≈251.33 mm。

圖3 前輪驅動結構實物圖
可進一步得出,前輪速度為:v=1 800×251.33≈452 984 mm。
由于馬達轉速較大,需要進行一定的降速,也為了更好地在采集車框架上安置馬達,不干涉其他部分的零件運作,選用兩個齒輪進行動力的傳遞,如圖4所示。

圖4 兩個互相垂直且嚙合的齒輪
兩個齒輪的齒數比為32:10,其中小齒輪與馬達相連,傳遞水平方向上的轉動。小齒輪與大齒輪互相垂直并嚙合,將水平方向上的轉動轉化為豎直方向上的轉動,而大齒輪與后輪同軸,即可帶動前輪轉動,實現采集車的驅動,由此可計算出采集車的理想速度。
采集車前輪的理想轉速為:

則在理想情況下,采集車一分鐘的行進距離為:l=v理想×c=562.5×251.33=141 373.132 mm,即141 m。
但因存在地表摩擦力、軸向位移、形變等情況,故必然無法達到既定的理想行進距離,為得到實際的行進距離數據進行了實驗,以測量實際的行進速度,采用慧魚編程軟件Fischertechnik ROBOTICs Terminal進行編程,程序如下頁圖5所示。
程序中,M2為驅動兩個前輪進行運動的編譯馬達,程序開始后,M2開始轉動,帶動前輪轉動,采集車開始運轉,運動30 s后,M2停止運動,采集車即停止運動。
經過測量,采集車在編譯馬達8擋的情況下,30 s的運行距離為6.5 m,則一分鐘的運行距離為13 m,較之計算得出的理想距離縮小了約10倍。
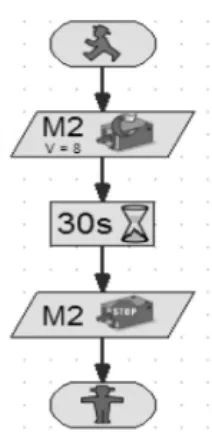
圖5 控制采集車直行程序
根據數據顯示與菠蘿果實實際尺寸的比較,得出菠蘿植株的大致分布圖,如圖6所示。以每列三顆菠蘿植株,共兩列進行設計。

圖6 菠蘿植株分布
為確保完整采摘每列菠蘿,設計車在第一顆菠蘿前開始運動,前輪距離菠蘿果實700 mm,在后輪距離第三顆菠蘿果實700 mm處開始轉向,采摘下一列菠蘿。經過計算,可得出采集車直行距離:
l=700+50+300+50+300+50+700+300=2 050 mm.根據采集車速度,可計算出直行時間為:

即約9.46 s,此處取10 s。
2.1.3 后輪轉向結構
菠蘿采集車需在種植地進行連續性工作,考慮到種植地地形特征,設計轉向模塊,滿足工作需要。
采集車通過后輪進行轉向,如圖7所示,通過XM電機進行驅動,其尺寸為60 mm×30 mm×30 mm。

圖7 后輪轉向結構實物圖
可調整1-8級速度,此處使用8級速度,電機上連接小齒輪,并與鏈條相連接,同另一大齒輪連接,完成運動傳遞,大齒輪下放置轉向模塊,帶動后輪進行轉向,如圖8所示[2]。

圖8 齒輪傳動
后輪同樣采用大輪胎進行傳動,其直徑為80 mm,周長為 s=πd=3.14×80≈251.33 mm。
連接后輪的電機選用8級速度,轉速為340 rpm,電機上連接了齒輪,與另一個齒輪通過鏈條進行運動傳遞,兩齒輪齒數比為30:10。其中小齒輪與電機連接,而大齒輪與轉向模塊相連,因此可算出后輪理想的轉動速度,即為:

即可算出轉一圈所需要的時間為:

因存在地表摩擦力、軸向位移、形變等情況,必然無法達到既定的理想轉速,為得到實際的轉速數據進行實驗,設計程序使采集車后輪不斷轉向5 s,以測量實際的旋轉速度,采用慧魚編程軟件Fischertechnik ROBOTICs Terminal進行編程,程序如圖9所示[3]。

圖9 控制采集車轉向程序
程序中,M1為驅動兩個后輪進行轉向運動的編譯馬達,程序開始后,M1開始轉動,帶動后輪轉動,采集車開始運轉,運動5 s后,M1停止運動,采集車即停止運動。

由于菠蘿的種植情況存在多樣性,故在轉彎處采集車的轉角調控也存在不同的情況,這是固定程序所無法調控的,為解決這一問題,設計了靈活性與可調性較高的遙控程序,如圖10所示。

圖10 可調節轉向程序
程序中設置了多個選擇命令,通過慧魚控制器進行操作,若操作者點選左轉鍵,則左轉命令被激活,右轉命令被關閉,編譯馬達控制采集車前輪左轉,從而實現左轉運動,反之則右轉。Play子程序中是控制采集車直行的程序,使采集車筆直走過一列菠蘿植株,采摘菠蘿。
2.1.4 雙圓盤采集結構
菠蘿采集過程中,設計雙圓盤結構,作為菠蘿收集輔助工具,利用皮帶輪將高速切割下的菠蘿通過雙圓盤完成果實傳送,減少對菠蘿的損傷,同時防止已采摘的菠蘿果實逃逸,如圖11、12所示[4]。

圖11 雙圓盤采集結構實物圖

圖12 雙圓盤結構
雙圓盤結構由圓盤及皮帶結構構成,圓盤結構帶動菠蘿向后傳輸,而皮帶結構起到防護作用,防止對菠蘿果實產生損壞。兩個圓盤的圓心距即為其半徑的二倍與菠蘿直徑之和,即d=50+50×2=150 mm。
以確保菠蘿可以順利進入后部采集籃[5]。
2.2 運動流程
菠蘿采集車的運作流程圖如圖13所示。

圖13 菠蘿采集流程圖
3 應用前景
隨著農業機械化發展程度、專業化水平的不斷提高,機械自動化設備應用于菠蘿等特殊水果種植、采摘領域越來越廣泛,特別是菠蘿等類型大規模承包種植地區,對菠蘿等水果的采摘、收割尤為重要。雖然市場上已經有各種菠蘿收割儀器,但由于菠蘿采摘難度系數較大,且植株分布較為不均,造成機械自動化水平較低,目前國內對菠蘿的收割方式仍普遍采用人工采摘的方式。
本產品具有結構簡單、便于操作等特點;它不僅可以較快地切割果實,更能通過雙圓盤模塊進行簡單的水果收集,為水果預裝袋做好準備工作;利用鋸片切割技術,相比于人工采摘更為便利,節約勞動成本;構建小車模型,采用后輪轉向,能更好地適用于菠蘿種植分布,使收割更為便利,機械自動化程度高[6]。
綜上所述,本產品在多個方面符合市場需求,體積較小,且易于拆裝維修,其物美價廉的特性將使得本產品易于大量推廣,因此,本產品具有較大的潛在市場及價值,將給果農工作帶來更多便利,促進果蔬產業發展。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
人大建設(2019年12期)2019-05-21 02:55:44
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國衛生(2015年3期)2015-11-19 02:53:32
現代企業(2015年9期)2015-02-28 18:56:50
