臭氧發(fā)生器開關(guān)電源移相控制策略研究
2018-09-21 08:49:20王子豪
上海電氣技術(shù) 2018年3期
賀 俊, 王子豪
1.上海矩奉電機(jī)自動化有限公司 上海 200331 2.上海電機(jī)學(xué)院 電氣學(xué)院 上海 201302
1 研究背景
臭氧因其獨特的物理和化學(xué)性質(zhì),被廣泛應(yīng)用于生活的各個領(lǐng)域,被世人喻為綠色消毒產(chǎn)品。現(xiàn)階段,相關(guān)臭氧產(chǎn)品已經(jīng)從飲用水處理系統(tǒng)拓展到污水處理、污染氣體處理、空氣凈化、空間殺菌及工業(yè)漂白等各個領(lǐng)域。
臭氧發(fā)生器電源的性能在很大程度上決定了設(shè)備的工作效率及可靠性。若開關(guān)電源采用傳統(tǒng)的比例積分微分(PID)控制方法,則參數(shù)在整定時以對象特性為基礎(chǔ),較為依賴傳遞函數(shù),而由于臭氧發(fā)生器負(fù)載屬于非線性負(fù)載,因此難以對其準(zhǔn)確進(jìn)行數(shù)學(xué)建模。
相比于其它控制方法,模糊自整定PID控制方法可以根據(jù)控制量的變化誤差及誤差變化率,對控制參數(shù)進(jìn)行自動調(diào)整,使控制系統(tǒng)品質(zhì)保持在最佳范圍內(nèi)[1-3]。
筆者首先通過MATLAB軟件進(jìn)行建模仿真,證明控制算法及電路拓?fù)涞目尚行裕约笆褂媚:哉≒ID移相控制策略的系統(tǒng)控制效果優(yōu)越性,然后使用T MS320F28335型數(shù)字信號處理器(DSP)實現(xiàn)系統(tǒng)的控制算法[4]。
2 開關(guān)電源移相控制原理
在眾多臭氧發(fā)生設(shè)備中,介質(zhì)阻擋放電法是目前制備臭氧的主流方法。筆者設(shè)計的臭氧電源采用介質(zhì)阻擋放電工作方式,以臭氧管作為負(fù)載,工作過程為:開關(guān)電源接入工頻交流電,經(jīng)過不可控整流電路及功率因數(shù)校正電路后,輸出400 V直流電;再經(jīng)過全橋逆變電路及變壓器升壓,輸出峰值電壓為2 k V、開關(guān)頻率為12 k Hz的交流電,作用在臭氧管的負(fù)載上,串聯(lián)諧振電感使負(fù)載工作在恒流諧振狀態(tài)。
筆者主要研究開關(guān)電源的移相控制,其原理如圖1所示。假設(shè)輸入為經(jīng)過功率因數(shù)校正的400 V直流電,負(fù)載部分為臭氧管負(fù)載的等效電路,具體理論數(shù)值可參考文獻(xiàn)[5-6]。移相控制的原理為:通過控制對角開關(guān)(QA和QD、QB和QC)同時開通的時間,來調(diào)整負(fù)載電流的大小。控制對角開關(guān)同時開通時間的方法有很多,考慮到軟開關(guān)的實現(xiàn)條件[7],筆者選擇固定占空比、錯開移相角的方法,即QA和QD的開關(guān)占空比都為50%,但是開通的時間不一樣,QD延時打開,最大延時量為QA波形的半個周期。
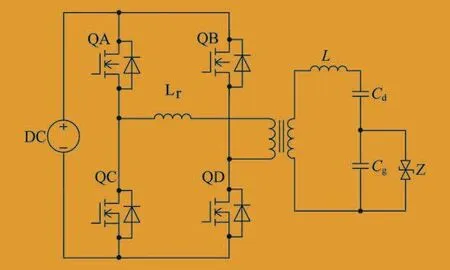
圖1 電源移相控制原理
3 MATLAB仿真
筆者采用模糊自整定PID移相控制方法,即在PID控制的基礎(chǔ)上進(jìn)行實時參數(shù)優(yōu)化。反饋控制系統(tǒng)原理如圖2所示。
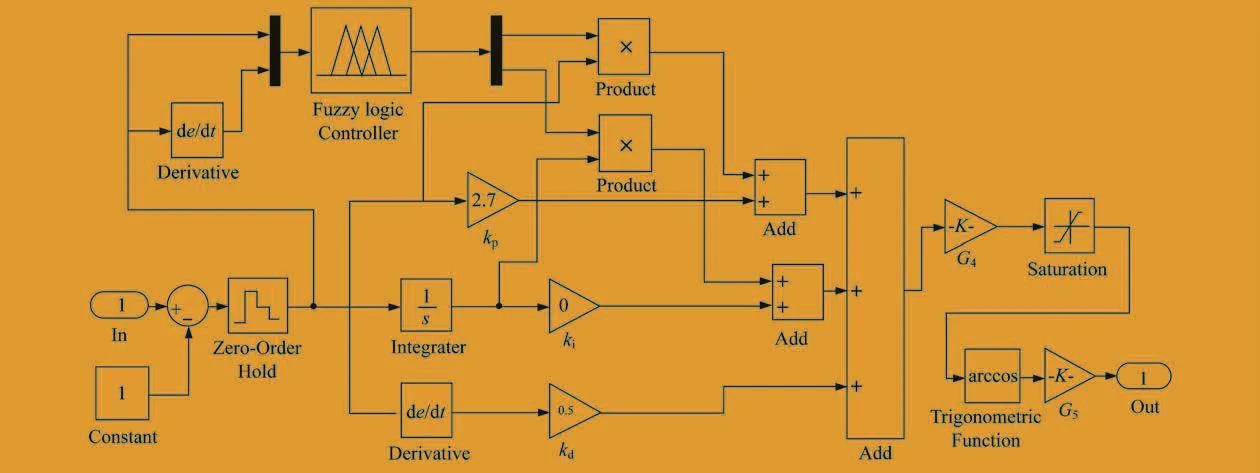
圖2 反饋控制系統(tǒng)原理
傳統(tǒng)的控制步驟為:測算出電流的有效值,輸入反饋控制模塊,與給定目標(biāo)值比較,計算出誤差e。為了模擬實際控制器控制效果,Zero-Order Hold模塊使連續(xù)信號轉(zhuǎn)換為離散數(shù)值,送入PID計算環(huán)節(jié)。一個閉環(huán)仿真周期設(shè)為0.1 ms,即電流的有效值每0.1 ms更新一次。kp、ki、kd為PID控制初始因數(shù)。誤差e與移相角θ之間的傳遞函數(shù)為:

移相角θ與移相時間,也即開關(guān)延時t之間的關(guān)系為:

式中:T為一個開關(guān)周期。
傳遞函數(shù)arccos的自變量取值為[-1,1],所以要對計算輸出值進(jìn)行線性縮小,限幅Saturation為[-1,1],最終輸出Out為超前橋臂與滯后橋臂之間的延時。
在實際臭氧發(fā)生器的工作過程中,臭氧管的負(fù)載會因工作時間的增加及溫度的變化而受到干擾因素的影響,對象參數(shù)特性會發(fā)生改變。加入?yún)?shù)模糊自整定的方法,可以使控制系統(tǒng)品質(zhì)指標(biāo)保持在最佳范圍內(nèi)。通過對不同工作狀態(tài)時誤差e與誤差變化率ec進(jìn)行模糊推理,得出PID三個參數(shù)的校正。筆者仿真采用比例積分(PI)參數(shù)自整定,僅調(diào)整比例因數(shù)kp和積分因數(shù)ki,減小計算量,加快系統(tǒng)的響應(yīng)速度,使系統(tǒng)更適合用于工業(yè)生產(chǎn)的實現(xiàn)和推廣。
4 比例與積分因數(shù)整定原則
4.1 比例因數(shù)
由于定義誤差為實際的電流值減去參考值,因此當(dāng)誤差e為負(fù)值時,系統(tǒng)的電流低于目標(biāo)值。當(dāng)e為正值時,系統(tǒng)處于超調(diào)狀態(tài)。誤差變化率ec為正值時,表示電流處于上升階段。ec為負(fù)值時,電流處于下降階段。將誤差e和誤差變化率ec的值分為7檔——NB、NM、NS、Z、PS、PM、PB,依次代表負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大。
在閉環(huán)控制過程中,先設(shè)定一個初始比例因數(shù)kp0。當(dāng)響應(yīng)在上升過程中誤差較大,即e為NB、NM時,比例因數(shù)的變化量Δkp取正值,增大比例因數(shù)以盡快消除誤差,根據(jù)ec的大小調(diào)整不同大小的Δkp。與此相對應(yīng),當(dāng)系統(tǒng)超調(diào)較大,即e為PB、PM時,Δkp取負(fù)值,減小比例因數(shù)使目標(biāo)值盡快回落[8-9]。
當(dāng)誤差在零附近,即e為Z時,分三種情況:①ec為P時,電流仍然處于上升狀態(tài),此時Δkp取負(fù)值;②ec為N時,電流處在下降狀態(tài),Δkp取正值;③ec為Z時,說明實際的電流值和目標(biāo)值很接近,并且較為穩(wěn)定,所以要保持此時的比例因數(shù)不變,Δkp取Z。
還有四個狀態(tài),選擇保持比例因數(shù)不變,分別是:①e為NS,ec為PS;②e為 NS,ec為PM;③e為PS,ec為NS;④e為PS,ec為NM。舉例說明,當(dāng)e為NS、ec為PS時,電流實際值小于目標(biāo)值,但是電流仍然保持小步伐上升的狀態(tài),此時不用改變比例因數(shù)電流也可以較快達(dá)到穩(wěn)態(tài)。這樣設(shè)計可以減小控制系統(tǒng)的工作量,提高控制系統(tǒng)的穩(wěn)定性。比例因數(shù)模糊規(guī)則表見表1。
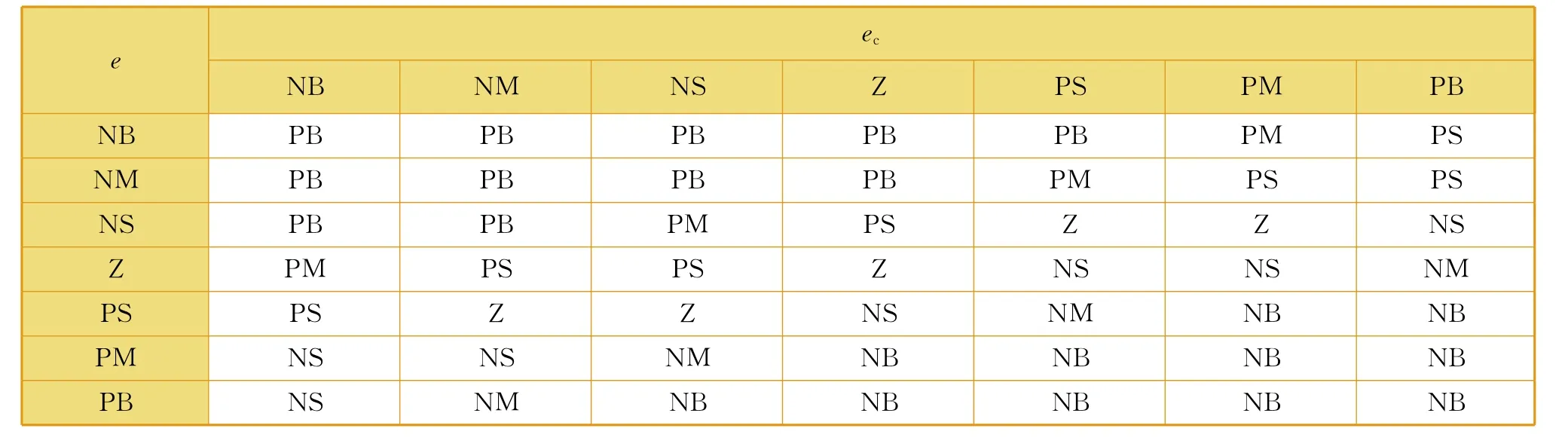
表1 比例因數(shù)模糊規(guī)則表
4.2 積分因數(shù)
積分因數(shù)的設(shè)定采用積分分離策略,在普通PID控制過程中引入積分環(huán)節(jié)的目的,主要是為了消除靜差、提高控制精度。但是在系統(tǒng)啟動和停止的過程中,短時間內(nèi)會產(chǎn)生很大的偏差,造成PID運(yùn)算的積分積累,導(dǎo)致控制量超過執(zhí)行機(jī)構(gòu)所允許的極限控制量,引起系統(tǒng)產(chǎn)生較大的超調(diào),甚至引發(fā)系統(tǒng)較大的振蕩。
積分分離策略是當(dāng)電流值與目標(biāo)值的誤差較大時,取消積分作用,以免因為積分作用使系統(tǒng)穩(wěn)定性降低。當(dāng)被控電流值接近目標(biāo)值時,引入積分控制。設(shè)置積分因數(shù)的初始值ki0=0,誤差e為Z、NS、PS時,積分因數(shù)取正值;否則,積分因數(shù)取零[9-10]。積分因數(shù)模糊規(guī)則表見表2。
在線性運(yùn)算過程中,控制系統(tǒng)通過對模糊邏輯規(guī)則的處理、查表和運(yùn)算,完成PID參數(shù)的在線校正。定義誤差e、誤差變化率ec的模糊集合均為{N,Z,P},N、Z、P依次代表負(fù)、零、正,e的基本論域為[-1,1],ec的基本論域為[-1,1.5],kp、ki的模糊集合也是{N,Z,P},kp的論域為[-3,3],ki的論域為[-1,1]。
圖3所示為電路啟動到達(dá)穩(wěn)態(tài)的過程中負(fù)載電流的有效值,虛線表示傳統(tǒng)PID控制,kp、ki的初始值分別設(shè)為2.7和1。實線表示模糊自整定PID移相控制,kp、ki的初始值分別設(shè)為2.7和0,在工作過程中伴隨模糊規(guī)則而變化。在傳統(tǒng)PID控制時,啟動過程中電流出現(xiàn)較大超調(diào),在1 ms過后達(dá)到穩(wěn)定,但是存在0.1 A左右的穩(wěn)態(tài)誤差。使用模糊自整定PID移相控制方法很好地解決了問題,啟動時超調(diào)量小,電流很快接近目標(biāo)值,達(dá)到穩(wěn)態(tài)。
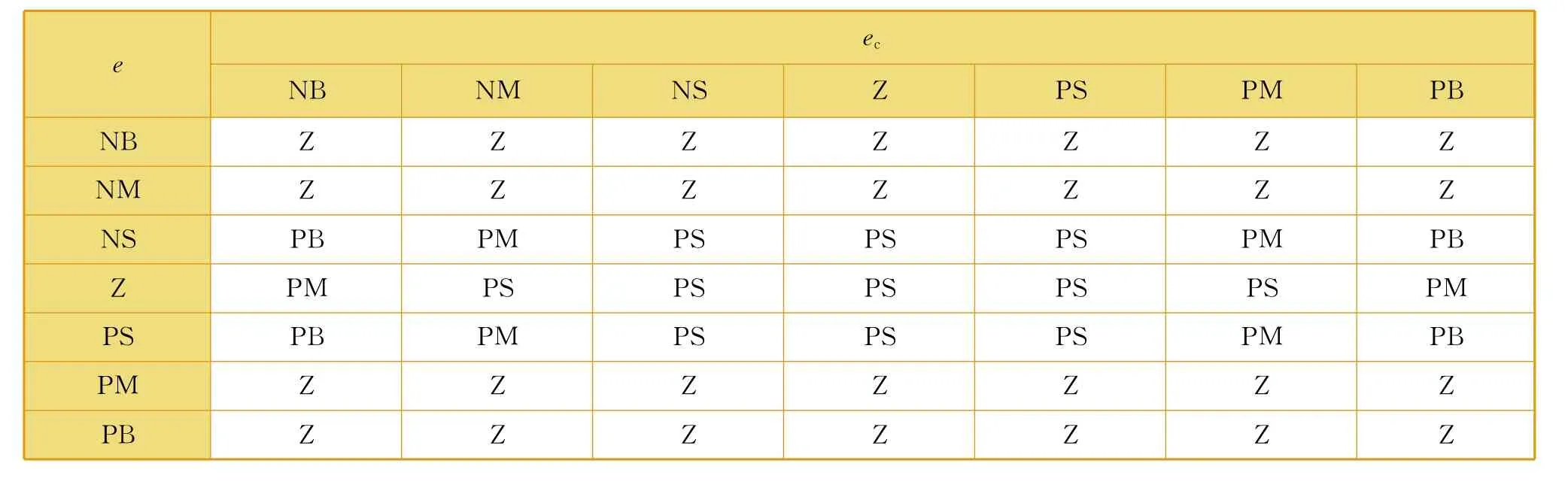
表2 積分因數(shù)模糊規(guī)則表
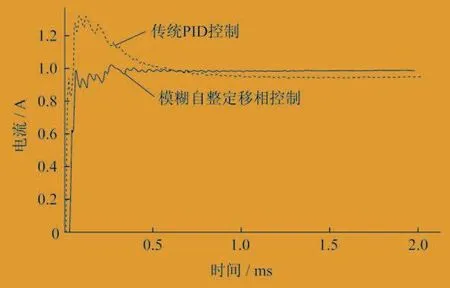
圖3 啟動過程電流有效值
5 基于DSP的控制策略軟件編程
5.1 模糊控制查表法
智能控制的硬件實現(xiàn)一直是工業(yè)生產(chǎn)中棘手的問題,在很多情況下由于編程復(fù)雜、計算時間較長,控制效果達(dá)不到預(yù)期,使工業(yè)生產(chǎn)中簡單的PI控制依然占據(jù)著主流。DSP和現(xiàn)場可編程門陣列等新一代控制器的迅速發(fā)展,大大提升了處理器的運(yùn)算速度和指令處理速度,使智能控制可以更加廣泛地應(yīng)用于工業(yè)生產(chǎn)中。采用T MS320F28335型DSP芯片,作為本次試驗的控制器,其系統(tǒng)時鐘為150 MHz,采用哈佛結(jié)構(gòu),能夠在一個周期內(nèi)完成32×32位的乘法累加運(yùn)算,優(yōu)異的性能滿足本次試驗的需求。
模糊控制也是一種經(jīng)典的智能控制方式,目前主流的實現(xiàn)方法為在線計算法和查表法。在線計算法的優(yōu)點是程序所占的內(nèi)存空間小,缺點是計算周期長。查表法恰好相反,不需要實時運(yùn)算,但是需要較大的儲存空間。DSP芯片上有256 KB×16位嵌入式閃存儲存器,有充足的空間儲存數(shù)據(jù),適合使用查表法來實現(xiàn)控制。具體應(yīng)用時,在MATLAB Si mulink中有系統(tǒng)測試界面,可以計算出模糊控制器一一對應(yīng)的輸入和輸出關(guān)系,制作出表格。
模糊控制規(guī)則為:輸入量為誤差e和誤差變化率ec,根據(jù)需求選擇取值精度,對應(yīng)輸出值為kp、ki。使用if嵌套的方法對f uzzy()函數(shù)編程:
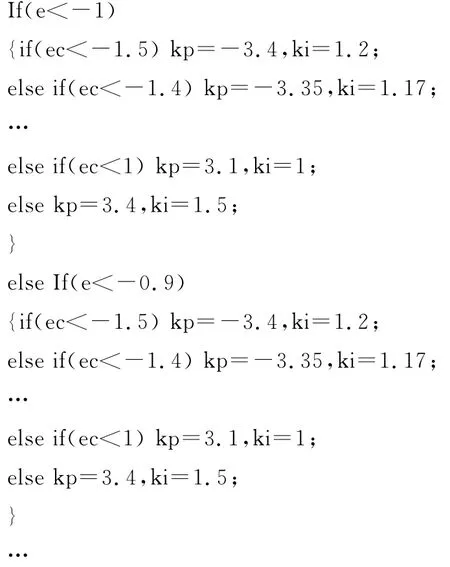
首先對e進(jìn)行判斷,然后再對ec進(jìn)行判斷。函數(shù)返回值為kp、ki,為PID()函數(shù)提供參數(shù)。本程序設(shè)計精度為0.1,有些工作環(huán)境中需要提高模糊精度,勢必要增加程序的存儲地址,在DSP的隨機(jī)存儲器中可能會無法運(yùn)行,建議直接在閃存存儲器中調(diào)試。
5.2 數(shù)模轉(zhuǎn)換采樣與中斷函數(shù)
數(shù)模轉(zhuǎn)換采樣和中斷實際是控制閉環(huán)周期,如前文所述,閉環(huán)周期為0.1 ms,即每0.1 ms進(jìn)行一次電壓采樣,與參考值比較,得出e、ec,通過fuzzy()函數(shù)更新kp、ki,代入PID()函數(shù),更新被控量移相角。
數(shù)模轉(zhuǎn)換采用定時器觸發(fā),在CPU ti mer0中斷里使能數(shù)模轉(zhuǎn)換的軟件觸發(fā)位,觸發(fā)位具體為Adc Regs.ADCTRL2.bit.SOC_SEQ1=1。在數(shù)模轉(zhuǎn)換初始化函數(shù)void ADC_config(void)中,配置數(shù)模轉(zhuǎn)換的采樣頻率、采樣通道數(shù)、中斷入口、結(jié)果排序等。DSP芯片的采樣模塊有16個采樣通道,為了提高采樣精度,選擇六通道順序采樣后累加求平均策略。
數(shù)模轉(zhuǎn)換的原理是DSP可以測量出固定幾個引腳上的輸入電壓,范圍是0~3 V,所以負(fù)載的電流大小不可以直接測量,需要使用電流互感器將電流按比例縮小,經(jīng)過二極管整流電路后接在電阻上,電阻兩端的電壓才可以直接輸入數(shù)模轉(zhuǎn)換引腳,如圖4所示。
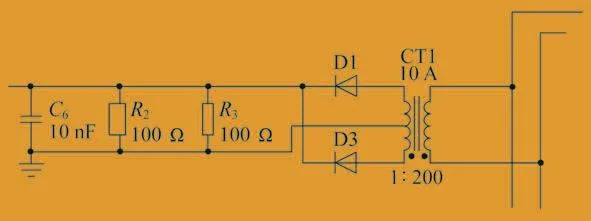
圖4 數(shù)模轉(zhuǎn)換采樣原理
5.3 雙橋臂脈寬調(diào)制波
本次試驗需要用到4路脈寬調(diào)制波,即DSP芯片中兩個EPWM模塊。EPWM1模塊輸出超前橋臂的波形控制開關(guān)管A、C,EPWM2模塊輸出滯后橋臂的波形控制開關(guān)管B、D。系統(tǒng)時鐘頻率為150 MHz,脈寬調(diào)制波控制頻率為12 k Hz,等于12 500個系統(tǒng)時鐘。模塊統(tǒng)一采用Up-Down計數(shù)模式,寄存器TBPRD的數(shù)值為6 250,移相角θ可通過6 250θ/π轉(zhuǎn)換為時鐘周期個數(shù)。
EPWM1和EPWM2模塊波形分別如圖5、圖6所示。
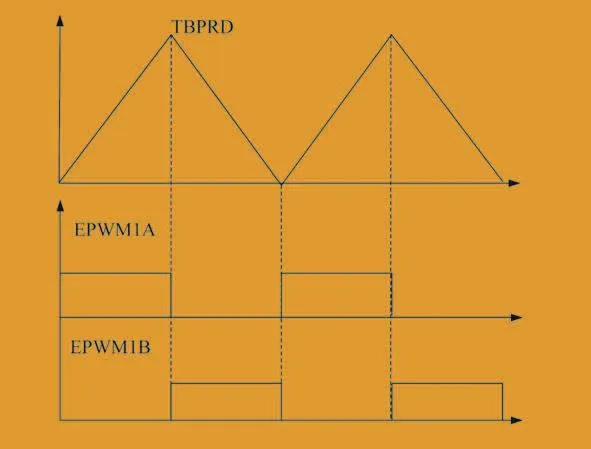
圖5 EPWM1模塊波形
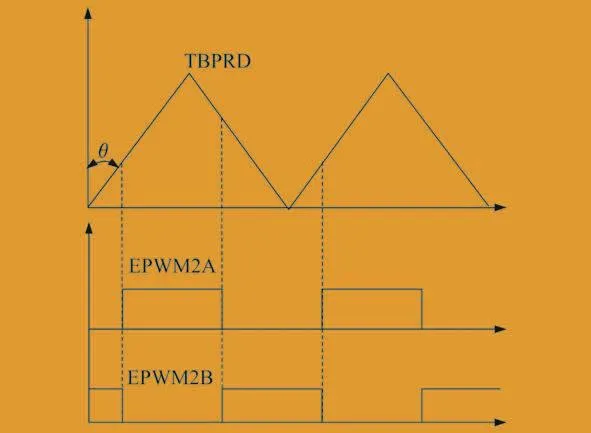
圖6 EPWM2模塊波形
具體編程如下:
EPwm1 Regs.AQCTLA.bit.PRD=AQ_SET;
EPwm1 Regs.AQCTLA.bit.ZRO=AQ_CLEAR;
EPwm1 Regs.AQCTLB.bit.PRD=AQ_CLEAR;
EPwm1 Regs.AQCTLB.bit.ZRO=AQ_SET;
EPwm2 Regs.CMPA.half.CMPA=Y(jié)IXIANG;
EPwm2 Regs.CMPB=6250-YIXIANG;
EPwm2 Regs.AQCTLA.bit.CAU=AQ_SET;
EPwm2 Regs.AQCTLA.bit.CBD=AQ_CLEAR;
EPwm2 Regs.AQCTLB.bit.CAU=AQ_CLEAR;
EPwm2 Regs.AQCTLB.bit.CBD=AQ_SET;
EPWM1模塊不需要設(shè)置比較寄存器數(shù)值,在數(shù)值寄存器值等于TBPRD和0時,動作模塊觸發(fā)。EPWM2模塊CMPA數(shù)值為Uint16 YIXIANG,CMPB數(shù)值為6250-YIXIANG。
6 試驗波形
根據(jù)前文的理論分析,筆者設(shè)計試制了一臺功率為10 k W的臭氧發(fā)生器電源樣機(jī)。
當(dāng)臭氧發(fā)生器電源設(shè)備工作達(dá)到穩(wěn)態(tài)時,負(fù)載兩端的電流和電壓波形如圖7、圖8所示。圖7中橫坐標(biāo)每格代表30μs,圖8中橫坐標(biāo)每格代表40μs。藍(lán)色的電壓波形基本呈正弦波形狀,臭氧管負(fù)載與串聯(lián)電感經(jīng)過諧振后負(fù)載電壓峰峰值穩(wěn)定在8 k V左右。黃色的電流波形則因為臭氧管本身工作特性有非線性的放電過程,產(chǎn)生了一些形變,不過總體而言還是呈正弦波形周期變化,電流有效值接近0.78 A的目標(biāo)值。
7 結(jié)束語
筆者基于臭氧發(fā)生器的開關(guān)電源控制策略,對傳統(tǒng)PID控制進(jìn)行優(yōu)化,通過MATLAB軟件仿真確認(rèn),模糊自整定PID移相控制更適合臭氧發(fā)生器開關(guān)電源工作。搭建試驗樣機(jī)實現(xiàn)了整個控制過程,證明筆者提出的控制策略可以在實際生產(chǎn)過程中應(yīng)用。
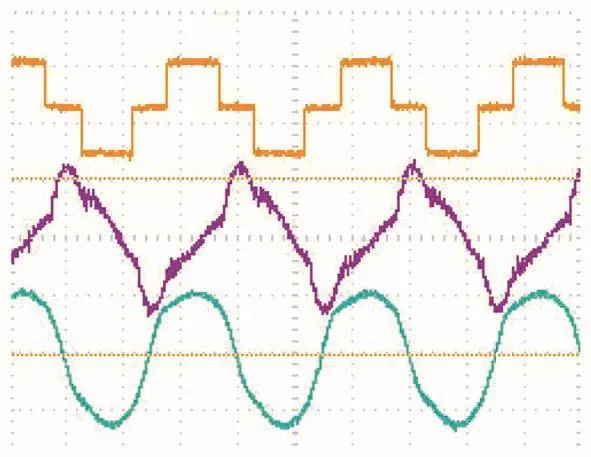
圖7 移相角90°時負(fù)載波形
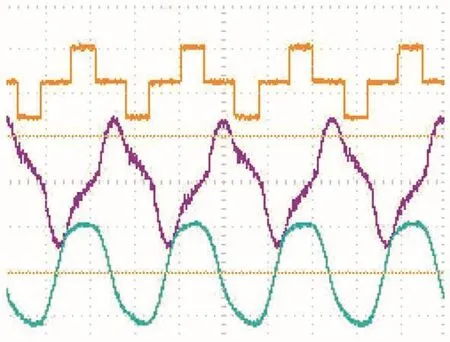
圖8 移相角50°時負(fù)載波形
