智能調節產品間距的系統的開發
2018-09-22 04:15:52高浩杰陸光銘東莞理工學院機械工程學院黎梓恒曾志彬吳國洪東莞市橫瀝模具科技產業發展有限公司
數碼世界 2018年8期
高浩杰 陸光銘 東莞理工學院機械工程學院 黎梓恒 曾志彬 吳國洪 東莞市橫瀝模具科技產業發展有限公司
1 前言
包裝作為生產的最后一道大工序,面臨著多種加工的技術要求,包括把產品整齊地裝箱,從而在企業中往往需要安排較多的員工在該環節。為了提高生產效率,有些產品會呈陣列形式放置從而被加工,但是,由于加工的技術要求,需要讓這些產品相隔一定的距離,加工完成之后這些產品將要裝箱,然而為了減小包裝的空間,在裝箱的過程中需要對相鄰產品間的間距進行調整。現有的方法通常是采用人工的方式進行裝箱,這嚴重影響了裝箱的效率,同時也會增加企業的用工成本;也有些企業采用鉸鏈機構實現調整產品間距可有效代替人工,但是相關鉸鏈機構的復雜性讓該設計與加工增加了難度,同時也增加了加工成本。若利用一種自動包裝生產線來替代人工,預測不僅可以降低人力成本,而且可以提高作業效率,保證作業精準度。自動化包裝生產線是將自動包裝機、輔助設備以及輸送裝置根據產品包裝工藝,按一定的排序組合,再配以相應的檢測、控制、自動調整補償裝置等組成。包裝物品由一端不斷送入,包裝材料在相應的工位加入,物品按工藝流程順序經過各工序,產品從另一端輸出,使物品在無需人工直接參與操作的情況下自動完成輸送、包裝的全過程。自動化包裝生產線的輔助設備扮演著重要角色。
針對以上問題,本文提出了智能調節產品間距的系統的開發的方案,大致為利用無桿氣缸帶動機械手在水平方向移動,雙桿氣缸帶動機械手在豎直方向移動,再利用四個行程分別相差10mm的雙桿氣缸的配合動作實現調節機械手的抓取間距。可調抓取間距機械手將作為自動化包裝生產線的輔助設備,下文將具體從機構設計方面與軟件系統搭建方面進行闡述。
2 硬件平臺設計
本文所設計的機械手結構如圖1所示,包括有連接組件、驅動件、傳動件、執行件和限位件。機械手的連接組件包括有底板、立板、肋板、橫梁、X軸載板、Z軸載板Ⅰ、Z軸載板Ⅱ、氣嘴固定件。機械手的驅動件包括有無桿氣缸、氣缸Ⅰ、氣缸Ⅱ、氣缸Ⅲ、氣缸Ⅳ、氣缸Ⅴ。機械手的傳動件包括有導軌、滑塊、帶滑塊的光軸。機械手的執行件包括有氣嘴Ⅰ、氣嘴Ⅱ、氣嘴Ⅲ、氣嘴Ⅳ、氣嘴Ⅴ。機械手的限位件包括有限位件、緩沖器。
如圖1左右兩端所示,底板、立板和肋板兩兩垂直設置,底板、立板和肋板組成的結構體左右對稱設置,中間設置了橫梁形成龍門式結構。無桿氣缸設置在龍門式結構的上方,特指橫梁的上方,利用無桿氣缸驅動機械手的X軸移動,穩定性比較高。導軌和與之配套的滑塊設置在橫梁的前表面,并且導軌是水平設置,X軸載板設置在無桿氣缸的桿體的前表面,并連接于導軌滑塊的前表面,即為X軸載板在豎直面上同時連接了無桿氣缸的桿體和導軌滑塊。氣缸Ⅰ設置在X軸載板的前表面,用于驅動機械手的上下移。Z軸載板Ⅰ設置在無桿氣缸的桿體的上表面,Z軸載板Ⅰ呈凸字型。Z軸載板Ⅱ設置在氣缸Ⅰ的桿體的下表面,Z軸載板Ⅰ與Z軸載板Ⅱ之間設置了左右對稱的帶滑塊的光軸,當氣缸Ⅰ動作時,Z軸載板Ⅱ和光軸一起相對于Z軸載板Ⅰ發生上下運動。氣缸Ⅱ設置在Z軸載板Ⅱ的左半部分的右上角;氣缸Ⅲ設置在Z軸載板Ⅱ的左半部分的左下角;氣缸Ⅳ設置在Z軸載板Ⅱ的右半部分的左上角;氣缸Ⅴ設置在Z軸載板Ⅱ的右半部分的右下角,氣缸Ⅲ、氣缸Ⅱ、氣缸Ⅳ、氣缸Ⅴ的形成依次減少10mm。氣嘴固定件四個分別設置在Z軸載板Ⅱ的上方,分別與氣缸Ⅱ、氣缸Ⅲ、氣缸Ⅳ、氣缸Ⅴ的桿體連接,氣嘴固定件的樣式為長方體;氣嘴Ⅰ、氣嘴Ⅱ、氣嘴Ⅲ、氣嘴Ⅳ、氣嘴Ⅴ從左到右分別設置在五個氣嘴固定件的末端,即Z軸載板Ⅱ的正前方,特別說明,當氣缸Ⅱ、氣缸Ⅲ處于伸展的狀態,同時氣缸Ⅳ、氣缸Ⅴ處于不伸展的狀態時,五個氣嘴固定件剛好依次接觸;當氣缸Ⅱ、氣缸Ⅲ處于不伸展的狀態,同時氣缸Ⅳ、氣缸Ⅴ處于伸展的狀態時,五個氣嘴固定件的間隔均增大10mm。限位件設置在五個氣嘴固定件的上方,用于輔助導向五個氣嘴固定件在水平方向移動;緩沖器有兩個,分設置在兩塊立板的內表面,用于限定機械手在水平方向的運動范圍。
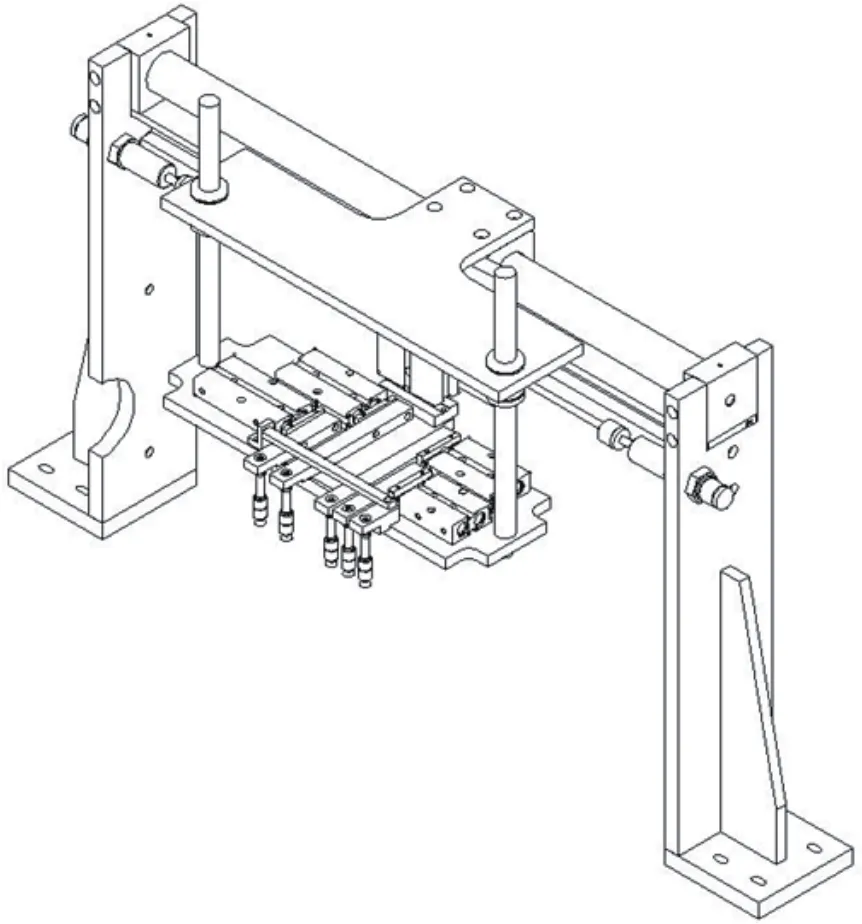
圖1 硬件結構設計圖
本文所設計的機械手的運動方式為,在水平方向設置的無桿氣缸帶動執行件(氣嘴)在水平方向來回移動,其中左右的極限即為兩個緩沖器的位置。在豎直方向上設置的氣缸Ⅰ帶動執行件(氣嘴)在豎直方向來回移動;氣缸Ⅱ、氣缸Ⅲ、氣缸Ⅳ與氣缸Ⅴ之間的動作配合能調節五個氣嘴之間的距離,即調節抓取的距離。當氣缸Ⅱ、氣缸Ⅲ處于不伸展的狀態,同時氣缸Ⅳ、氣缸Ⅴ處于伸展的狀態,此時五個氣嘴的間距處于較大的狀態;當氣缸Ⅱ、氣缸Ⅲ處于伸展的狀態,同時氣缸Ⅳ、氣缸Ⅴ處于不伸展的狀態,此時五個氣嘴的間距處于較小的狀態,如此通過改變氣缸Ⅱ、氣缸Ⅲ、氣缸Ⅳ、氣缸Ⅴ的通氣方式即可調節機械手的抓取間距。
3 結語
本文所做的工作總結如下,根據功能的要求對機械手進行了結構設計,本文所設計的機械手利用一個無桿氣缸實現在X軸上水平移動、利用一個雙軸氣缸實現在Z軸上豎直移動,利用四個行程形成等差數列的直線氣缸,即可實現機械手在抓取產品的過程中自動調整產品間距的功能,控制方式簡單,有利于工人快速上手操作。可調抓取間距機械手能作為自動化包裝生產線的輔助設備,有助于提高作業效率,保證作業精準度,自動調整產品間距并完成裝箱,具有良好的效益。
猜你喜歡
現代裝飾(2022年4期)2022-08-31 01:39:32
現代裝飾(2022年3期)2022-07-05 05:55:06
少先隊活動(2021年4期)2021-07-23 01:46:22
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
Coco薇(2015年1期)2015-08-13 02:23:50
中國艦船研究(2014年5期)2014-05-14 06:43:09
都市快軌交通(2014年4期)2014-02-27 08:35:05
玩具(2009年10期)2009-11-04 02:33:14