智能裝備產(chǎn)品的系統(tǒng)的開發(fā)
2018-09-22 04:15:52梁勇東葉文斌鐘鍵東莞理工學(xué)院機(jī)械工程學(xué)院曾志彬吳國洪東莞市橫瀝模具科技產(chǎn)業(yè)發(fā)展有限公司陳學(xué)忠廣東石東實(shí)業(yè)集團(tuán)公司
數(shù)碼世界 2018年8期
關(guān)鍵詞:設(shè)置
梁勇東 葉文斌 鐘鍵 東莞理工學(xué)院機(jī)械工程學(xué)院 曾志彬 吳國洪 東莞市橫瀝模具科技產(chǎn)業(yè)發(fā)展有限公司 陳學(xué)忠 廣東石東實(shí)業(yè)(集團(tuán))公司
1 前言
在工業(yè)自動化生產(chǎn)中,無論是單機(jī)還是組合機(jī)床,以及自動生產(chǎn)流水線,都要用到機(jī)械手來完成物體的取放。機(jī)械手在自動化生產(chǎn)中的優(yōu)勢是十分明顯的,可以部分代替人工操作,從而減少人工成本,提高生產(chǎn)效率;其次可以按照設(shè)定好的程序,實(shí)現(xiàn)對于部件的傳輸和裝卸,持續(xù)工作,而且精度高,一般不容易出現(xiàn)誤差,相比于人工操作更加精確;還有,其安全性好,對于一些危險(xiǎn)性較大的工序,進(jìn)行施工時(shí),由于不需要進(jìn)行人工操作,因此可以有效保證,人員安全,減少意外事故的發(fā)生。
其中就有利用機(jī)械手搬運(yùn)大件貨物,目前,搬運(yùn)大件貨物(如大型紙箱)的機(jī)械手大多數(shù)采用吸盤把貨物提起從而進(jìn)行搬運(yùn)的方式,然而,容易發(fā)生吸不住,提不起來的現(xiàn)象,并且在吸放的重復(fù)性動作中,真空吸盤容易老化,需要時(shí)常更換真空吸盤,對于大規(guī)模使用吸盤機(jī)械手搬運(yùn)貨物的環(huán)境,時(shí)常更換真空吸盤極大影響了工作效率。然而,企業(yè)往往需要運(yùn)行更可靠,效率更好的貨物夾持器。
在自動生產(chǎn)線中,各種型式的機(jī)械手應(yīng)用越來越廣泛。現(xiàn)代的機(jī)械手采用各種電氣、機(jī)械、液壓、氣動傳動機(jī)構(gòu),并用電子系統(tǒng)進(jìn)行控制,以實(shí)現(xiàn)模仿人的手臂和手指動作,而其手爪的結(jié)構(gòu)也是各式各樣。根據(jù)上述情況,手爪方式更適合大件貨物的夾持,手爪的設(shè)計(jì)是各型式的機(jī)械手重點(diǎn),通常的夾持手爪是通過直接使用氣動推動,但該方法在大件貨物中較為不穩(wěn)定,偶爾出現(xiàn)卡物的情況,違背了公司對夾持器運(yùn)行可靠,效率好的要求。因此有必要設(shè)計(jì)一款適合大件貨物搬運(yùn)的機(jī)械手。
針對以上問題,本文提出了一種基于PLC在智能裝備領(lǐng)域的應(yīng)用示范的設(shè)計(jì)方案,大致為將氣缸的末端與手爪的一側(cè)連接,利用一個(gè)氣缸驅(qū)動,并通過光軸與滑塊、一個(gè)齒輪兩平行齒條的傳動方式,實(shí)現(xiàn)手爪的兩側(cè)同步動作,夾持貨物。下文將具體從機(jī)構(gòu)設(shè)計(jì)方面與控制方面進(jìn)行闡述。
2 設(shè)計(jì)
根據(jù)目標(biāo)功能,本文所設(shè)計(jì)的應(yīng)用于夾持大件貨物的手爪,在機(jī)構(gòu)上分別從驅(qū)動部分、傳動部分和執(zhí)行部分三方面進(jìn)行設(shè)計(jì)。驅(qū)動部分包括有氣缸,該氣缸是一種直線推桿氣缸,氣缸水平設(shè)置在手爪基體的上側(cè)方,通過氣缸固定件連接手爪基體,手爪基體是機(jī)械手的最基本結(jié)構(gòu),氣缸固定件由一塊角鋁連接水平設(shè)置的鋁板組成,角鋁固定連接直線推桿氣缸,鋁板與手爪基體連接,進(jìn)一步與角鋁連接,從而固定直線推桿氣缸。
傳動部分包括有缸爪連接件(連接直線氣缸與手爪的零件)、手爪固定板、光軸滑塊、齒條、齒輪。其中缸爪連接件設(shè)置于氣缸輸出軸的末端,同時(shí)在手爪基體的左側(cè),進(jìn)一步連接手爪固定板,氣缸動作時(shí)缸爪連接件隨著氣缸產(chǎn)生相對于手爪基體的移動,手爪固定板設(shè)置于兩個(gè)光軸滑塊的下表面,從而手爪固定板可隨氣缸移動。光軸與光軸滑塊配套使用,總設(shè)計(jì)樣式為四根光軸、四個(gè)光軸滑塊,并且為兩行兩列分布式,其中一根光軸通過兩個(gè)光軸支座固定在手爪固定板的下表面,光軸與滑塊輔助于手爪產(chǎn)生相對運(yùn)動。手爪固定板設(shè)置在手爪基體的下表面,進(jìn)一步的齒條設(shè)置在手爪固定板的下表面,左右兩根齒條圍繞齒輪平行設(shè)置,實(shí)現(xiàn)兩齒條相對運(yùn)動。齒輪是一種帶軸承的齒輪,與齒條一同設(shè)置在定位板的上表面,定位板起著支撐兩條齒條的作用。定位板設(shè)置與齒輪軸連接,并設(shè)置于齒輪的下表面,齒輪與齒輪軸套合使用,齒輪軸設(shè)置在固定板的下方,兩者通過齒輪固定件固定連接;齒輪軸固定不旋轉(zhuǎn),齒輪自帶軸承可旋轉(zhuǎn)。手爪基體的上表面設(shè)置了通孔,用于與機(jī)械手主體連接。執(zhí)行部分包括手爪,手爪設(shè)置在手爪固定板的下方,手爪呈L型,用于夾持貨物。
本文所設(shè)計(jì)的手爪可跟生產(chǎn)線的其他自動化設(shè)備一起使用,通過手爪基體的通孔連接至機(jī)械手末端,該手爪的氣缸通過進(jìn)出氣口與氣動電磁閥連接,進(jìn)一步的,氣動電磁閥的com端與PLC的輸出端電連接,氣動電磁閥的常開端與+24V電連接。PLC控制器按順序指令執(zhí)行,當(dāng)PLC向氣動電磁閥的com端的輸出狀態(tài)改變時(shí),氣體進(jìn)入氣缸的方式改變,氣缸動作,通過缸爪連接件帶動左邊的手爪固定板運(yùn)動,進(jìn)而帶動與左邊的手爪固定板連接的齒條運(yùn)動,配合齒輪的傳動,實(shí)現(xiàn)左右兩平行設(shè)置的齒條相對運(yùn)動,結(jié)合光軸的導(dǎo)向作用,實(shí)現(xiàn)手爪的相對運(yùn)動,從而可夾持貨物。具體運(yùn)動方式為,氣缸縮短時(shí),通過缸爪連接件帶動左側(cè)手爪向右移,進(jìn)一步帶動左齒條向右移動,在嚙合的作用下,齒輪產(chǎn)生順時(shí)針轉(zhuǎn)動,并且?guī)佑引X條往左移動,右側(cè)手爪也同步地向左移動,機(jī)械手處于夾取狀態(tài)。由于左齒條與右齒條的齒距相同,因此左齒條與右齒條是同步動作的,并且保持著兩個(gè)齒條的中心與被夾取的物體的中心重合,有利于物體的定位。氣缸伸長時(shí),通過缸爪連接件帶動左側(cè)手爪向左移,進(jìn)一步帶動左齒條向左移動,在嚙合的作用下,齒輪產(chǎn)生逆時(shí)針轉(zhuǎn)動,并且?guī)佑引X條往右移動,右側(cè)手爪也同步地向右移動,機(jī)械手處于張開狀態(tài)。
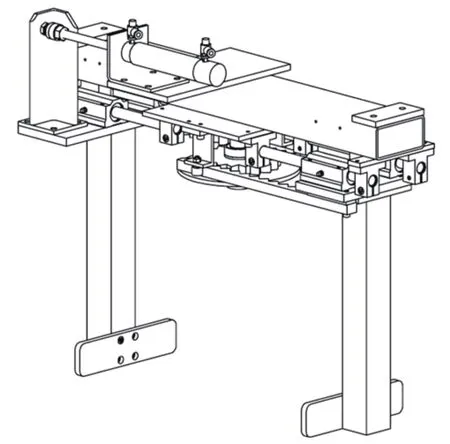
圖1 機(jī)構(gòu)設(shè)計(jì)圖
3 結(jié)語
本文所做的工作為:根據(jù)功能的要求對移動機(jī)器人進(jìn)行了結(jié)構(gòu)設(shè)計(jì)和控制系統(tǒng)設(shè)計(jì)。本文所設(shè)計(jì)的應(yīng)用于夾持大件貨物的手爪只用一個(gè)氣缸進(jìn)行驅(qū)動,控制方式簡單,使用齒輪齒條傳動方式,安裝方便,并且,一個(gè)齒輪兩平行齒條的傳動方式,直接使得機(jī)械手末端的中心與貨物的中心在同一垂直面上,容易定位,為機(jī)械手的運(yùn)動定位提供了便捷,符合企業(yè)所需要的安裝方便,控制簡單等特點(diǎn)。
猜你喜歡
少先隊(duì)活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業(yè)后醫(yī)學(xué)教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點(diǎn)報(bào)·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫(yī)學(xué)院學(xué)報(bào)(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16