智能調節產品角度的系統的開發
2018-09-22 04:15:52羅鴻彬羅男生東莞理工學院機械工程學院黃市生曾志彬吳國洪東莞市橫瀝模具科技產業發展有限公司
數碼世界 2018年8期
關鍵詞:設置
羅鴻彬 羅男生 東莞理工學院機械工程學院 黃市生 曾志彬 吳國洪 東莞市橫瀝模具科技產業發展有限公司
1 前言
機械手是在機械化,自動化生產過程中發展起來的一種新型裝置。機械手可以代替人工進行繁重或者重復的勞動,不僅可以提高生產效率,實現生產的自動化和機械化,還可以有效保護工作人員的人身安全。在現代生產過程中,機械手被廣泛的運用于自動生產線中,機械人的研制和生產已成為高技術領域內,迅速發展起來的一門新興的技術,它更加促進了機械手的發展,使得機械手能更好地實現與機械化和自動化的有機結合。機械手雖然還不如人手那樣靈活,但它具有能不斷重復工作和勞動,不知疲勞,不怕危險,抓舉重物的力量比人手力大的特點,因此,機械手已受到許多部門的重視,并越來越廣泛地得到了應用[1]。
現有的旋轉機械手一般都是以旋轉氣缸或電機為驅動件[2],然而使用旋轉氣缸驅動的旋轉機械手不具有任意調角度的功能,不適合應用在旋轉角小于90°的多種場合[3];使用電機驅動的旋轉機械手固然能任意調角度,但電機的使用增加了成本,并且需要控制器控制,使用起來較復雜[4]。
針對以上問題,本文探討加工角度在智能制造行業的重要性及應用示范,大致為通過一個直線推桿氣缸帶動傳動件在指定導軌上運動,從而帶動氣爪最大產生90°的旋轉,通過調節螺釘控制直線推桿氣缸的行程進而實現在0-90°范圍內任意調節氣爪所需要的旋轉角度,從而實現到達目標位置夾放物體,滿足0-90°旋轉范圍內任意角度抓取物體。下文將具體從機構設計方面與軟件系統搭建方面進行闡述。
2 硬件平臺設計
本文所設計的機械手結構如圖1所示,包括有連接組件、驅動件、傳動件和執行件,其中連接組件包括有底板、支撐板、缸塊連接件、限位螺釘、螺釘固定件、連桿、帶軸承的軸座、方塊、氣爪連接板;驅動件包括有氣缸、氣爪;傳動件包括有導軌、導軌滑塊、U型槽板、限位塊、導向螺釘、帶法蘭的轉軸;執行件為手指。
底板的兩側設置了支撐板,兩者通過螺釘連接固定,支撐板共有兩塊,右側的支撐板設置了氣缸和帶軸承的軸座,左側的支撐板只設置了帶軸承的軸座。氣缸的正表面設置了導軌和導軌滑塊,氣缸的桿體通過缸塊連接件與導軌滑塊連接,氣缸的側面設置了螺釘固定件,進一步的,限位螺釘與螺釘固定件螺紋連接。限位塊設置在導軌滑塊的側面,U型槽板設置在導軌滑塊的正表面。導向螺釘設置在U型槽板的U型槽里,導向螺釘與連桿螺紋連接,連桿與帶法蘭的轉軸連接,通過連桿側面的緊定螺釘鎖緊。帶法蘭的轉軸通過帶軸承的軸座固定在支撐板的正表面,帶法蘭的轉軸、帶軸承的軸座呈左右對稱設置,方塊設置在兩個帶法蘭的轉軸的中間,方塊與轉軸的法蘭通過螺釘連接。氣爪設置在方塊的上方,兩者通過氣爪連接板進行連接,手指設置在氣爪的末端。此外,通過如下設計來實現限位螺釘在氣缸上的豎直上下移動:限位螺釘通過螺釘固定件與氣缸固定連接,限位螺釘與螺釘固定件通過螺紋結構固定連接。通過螺紋對限位螺釘的位置高度進行調節,從而調控限位螺釘和限位塊之間的高度差,控制氣缸的行程,進而控制旋轉的角度。工作情況具體為,當氣缸的桿體上移(下移)時,帶動導軌滑塊上移(下移)進而帶動U型槽板也上移(下移),U型槽板的上移(下移)帶動導向螺釘向槽內(槽外)移動,帶動連桿擺動,從而機械手旋轉,其中,當氣缸的桿體處于收縮情況,氣爪處于豎直方向,當氣缸的桿體伸長時,氣爪順時針擺動,當氣缸的桿體縮短時,氣爪逆時針擺動;導軌滑塊上移同時帶動限位塊上移,限位塊的上移將會碰到限位螺釘,通過調節限位螺釘在螺釘固定件下方的長度來調節氣缸的行程,進而調節導向螺釘向U型槽內移動的距離,連桿擺動的幅度,進而調節機械手旋轉角度。
通過氣缸和導向螺釘的配合作用來實現機械手在0~90°范圍內的任意角度旋轉。首先,氣缸驅動導軌滑塊在導軌上豎直方向往復運行,從而帶動U型槽板豎直運動,實現導向螺釘在U型槽內旋進或旋出,進而通過連接桿帶動方塊及方塊上的手指旋轉,實現機械手的正向或反向水平旋轉。旋轉的角度可通過氣缸的行程進行控制,一般情況下0~90°下均可實現。另一方面,通過限位螺釘和限位塊的設計,可對氣缸行程進行控制,進而調控連桿擺動的幅度和機械手旋轉的角度;由于限位螺釘的高度可調節,即可在任意合適范圍內控制氣缸的行程,實現任意特定角度的旋轉。同時機械手通過氣爪驅動手指松開或抓緊,實現物體的抓取。
本文所設計是硬件平臺,總結來說就是由連接組件、驅動件、傳動件和執行件組成。其能實現角度可調主要是通過螺紋對限位螺釘的位置高度進行調節以及通過氣缸和導向螺釘的配合作用,從而調控限位螺釘和限位塊之間的高度差,控制氣缸的行程,進而控制旋轉的角度,來實現機械手在0~90°范圍內的任意角度旋轉。
3 結語
基于上述一種基于可調角度旋轉機械手的設計,本文所做的工作總結如下,根據功能的要求對機械手進行了結構設計,主要利用氣缸帶動U形導軌的作用,使得機械手可實現大范圍的角度旋轉,既可實現大角度范圍的旋轉,也可實現0~90°小角度范圍的旋轉,且可任意調節旋轉的角度,結構簡單,解決了目前沒有可以調角度機械手的空白,實現了機械手在0-90°旋轉范圍內任意調節所需要的旋轉角度,滿足該旋轉范圍內任意角度的抓取物體。
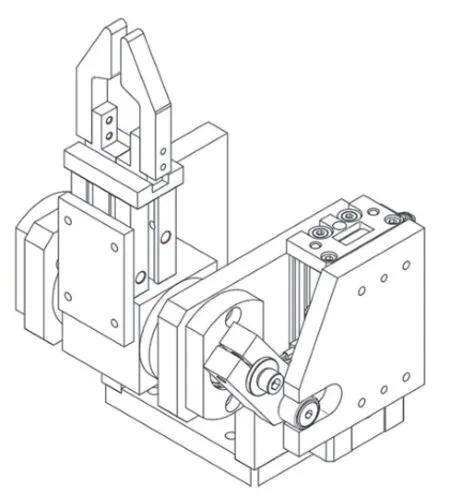
圖1 硬件結構設計圖
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業后醫學教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點報·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16