基于ATmega 328P的簡易風洞控制系統的設計
2018-09-26 09:34:28彭耀仟
電氣傳動自動化 2018年6期
關鍵詞:設計
彭耀仟
(中南大學自動化學院,湖南長沙410000)
1 系統方案
系統由ATmega328p單片機、TB6612電機驅動電路、風洞、電源模塊、觸摸屏顯示模塊和電源模塊構成,如圖1所示。
微控制器發出小球的位置或運動軌跡指令信息直流風機的風葉開始旋轉,產生的風力推動小球運動。運用特定的激光位置傳感器精確檢測兵兵球位置,并發送給微控制器,系統根據小球設定位置與實際位置的偏差,運用PID算法,調整PWM波占空比,控制電機轉速的大小,從而實時改變風機風力的大小,實現小球位置或運動軌跡的實時控制。

圖1 系統框圖
2 風洞控制實現方法
2.1 風機調速方式
采用脈寬調制技術(PWM),直接將恒定的直流電壓調制成可變大小和極性的直流電壓作為電動機的電樞端電壓,由單片機ATMEGA328p定時器模塊產生不同的占空比,進而調節離心風機的轉速。PWM調速便于控制,相應速度較快,抗干擾性強。
2.2 狀態調整算法的選擇
分段PID比例積分微分控制。普通PID控制算法中引入積分環節的目的,是為了消除靜差,提高控制精度。但在過程的啟動、結束或大幅度增減設定時,短時間內系統輸出有很大的偏差,會造成PID運算的積分積累,引起系統較大的超調和振蕩。溫度過程對象變化比較緩慢且帶有純滯后環節。若采用單純PID控制,當有較大擾動或大幅度改變給定值時,會產生較大的偏差,此時在積分項的作用下,往往會產生較大的超調和長時間的溫度波動,因而采用分段PID調節。
3 硬件電路的設計
3.1 風洞裝置的設計
采用內徑為40mmm亞克力有機玻璃圓管,硬度較硬,抗沖強度較弱,透明度較高,連接部同樣采用有機玻璃材料,采用螺紋套扣的方式和風機進行完美的連接,又可以當做最終作品支架的一部分,并且有機玻璃圓管的價格比UPVC圓管的價格低。
3.2 位置檢測電路
檢測傳感器選用GY-530 VL53L0X激光測距傳感。GY-530 VL53L0X激光測距傳感不同于傳統的紅外接近檢測傳感器,VL53L0X輸出的是精確到毫米的測距結果,目標物體的顏色和反射光不會影響測距結果。傳感器內部完成測距計算,通過I2C總線接口輸出數據,因而對系統主控制器的需求降至最低。
3.3 電機驅動電路
TB6612FNG是東芝半導體公司生產的一款直流電機驅動器件,它具有大電流MOSFET-H橋結構,雙通道電路輸出,可同時驅動2個電機。輸入信號端AIN1接高電平,IN2接低電平,電機M1正轉;通過PWM調制將恒定的直流電壓調制成可變大小和極性的直流電壓作為電機的電樞端電壓,實現系統的平滑調速,從而靈敏地調節風機的轉速。
3.4 觸摸屏顯示電路
觸摸屏顯示電路采用選用USART HMI串口觸摸屏,選用八位并行的接口方式,可實時動態顯示系統控制模式、小球位置和維持狀態的懸浮時間。
4 軟件設計
4.1 程序流程圖設計
程序設計的總體思路如圖2所示。

圖2 程序流程圖
4.2 調速算法設計
(1)本設計采用PID調速設計
PID調速有比例、積分、微分控制,簡稱PID控制,又稱PID調節。PID控制器就是根據系統的誤差,利用比例、積分、微分計算出控制量進行控制的。
(2)PID定高
本系統是控制電機轉軸上的扇葉風速來控制乒乓球的高度,當電機轉速大時,風扇產生的氣流增大,乒乓球向上運動,反之,當電機轉速小時,風扇產生的氣流增小,乒乓球向下運動,當乒乓球的重力等于氣流的力時,乒乓球懸停,因此,可以運用PID來控制小球的高度,設置的高度由數組確定,運用超聲波測出小球的真實高度,進而經過PID不停的運算后,輸出PWM波控制電機的轉速控制氣流的速度,使系統穩定,乒乓球懸停。算法流程圖如圖3所示。

圖3 PID算法流程圖
5 系統測試方法與結果
5.1 測試條件
(1)儀器
UT2062c雙通道示波器 一臺
UT71A 四位半數字萬用表 一臺
(2)環境條件
測試環境無風、無強光、溫度在26℃左右。
5.2 測試方法
通過控制觸摸屏的滑片控制小球實現所要求的功能。
5.3 測試結果
(1)小球置于圓管底部,啟動后控制小球向上到達BC段,并維持10秒以上,測試5次,如表3所示。

圖4 風洞組成

表3 設計要求(1)的測試數據
(2)當小球維持在BC段時,用長形板(寬度為11mm,即為風機直徑的三分之一)遮擋風機的進風口,小球繼續維持在BC段,測試5次,如表4所示。

表4 設計要求(2)的測試數據
(3)以C點的坐標為0cm、B點的坐標為10cm;用鍵盤設定小球的高度位置(單位:cm),啟動后使小球穩定地處于指定的高度10秒以上,上下波動不超過±1cm,測試5次,如表5所示。

表5 設計要求(3)的測試數據
(4)以適當的方式實時顯示小球的高度位置及小球維持狀態的計時,測試5次,如表6所示。

表6 設計要求(4)的測試數據
(5)小球置于圓管底部,啟動后5秒內控制小球向上到達圓管頂部處A端,且不跳離,維持10秒以上,測試5次,如表7所示。
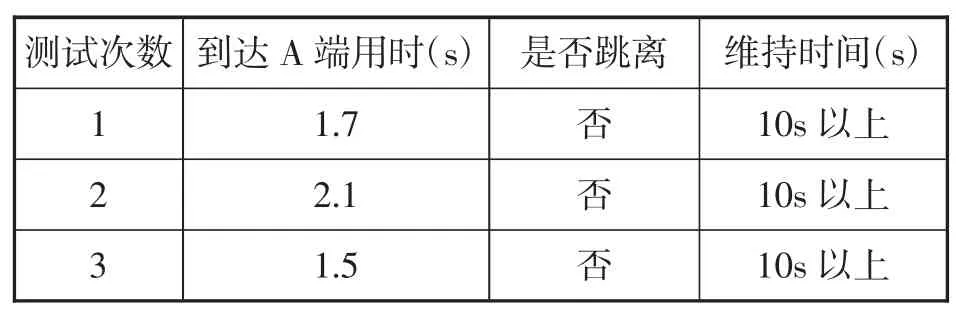
表7 設計要求(5)的測試數據
從表3~表7可知,本風洞控制系統完設計要求,并在此基礎上進行自主發揮設計,可任意顯示小球的位置高度。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04