MatIab計算在水電站機組盤車及軸線調整中的應用
2018-10-08 02:02:18賈棟林
水電站機電技術 2018年9期
賈棟林
(中國水利水電第十四工程局有限公司,云南 昆明650032)
1 概述
厄瓜多爾科卡科多辛克雷(Coca codo Sinclair)水電站是我國對外承建的EPC合同中最大的沖擊式水電站建設合同,其電站地下廠房裝設8臺單機容量205 MVA懸式立軸六噴嘴沖擊式水輪發電機組,額定功率187.5 MW,額定轉速300 r/min,飛逸轉速530 r/min,額定水頭604.1 m,是我國目前生產及厄瓜多爾國單機容量最大的立軸沖擊式水輪機組。
機組盤車及軸線調整部位包括:集電環、推力頭、鏡板、轉子、水機軸、轉輪。機組盤車及軸線測量剖面如圖1所示。
2 機組盤車
機組盤車采用在轉子軸端部安裝人工盤車裝置,按順時針方向推動機組轉動部分旋轉。盤車前在每個徑向擺度測量部位的+X、+Y方向設置百分表,在每個軸向跳動測量部位的+Y方向設置百分表。抱緊一半數量的上導瓦,瓦與軸頸間隙控制在0.02~0.04 mm。盤車時啟動高壓油頂起裝置,當鏡板底面與推力瓦接觸面間形成一層均勻油膜后,先連續推動旋轉1圈,然后按標記點進行8等分逐點盤車,并記錄各盤車點停穩后的靜態數據。盤車過程中,在推力頭上放置框式水平儀,推力頭在整個盤車過程中的水平度應≤0.02 mm/m,若有超差,應微調推力瓦受力,使其滿足要求。
3 應用MatIab軟件分析盤車數據
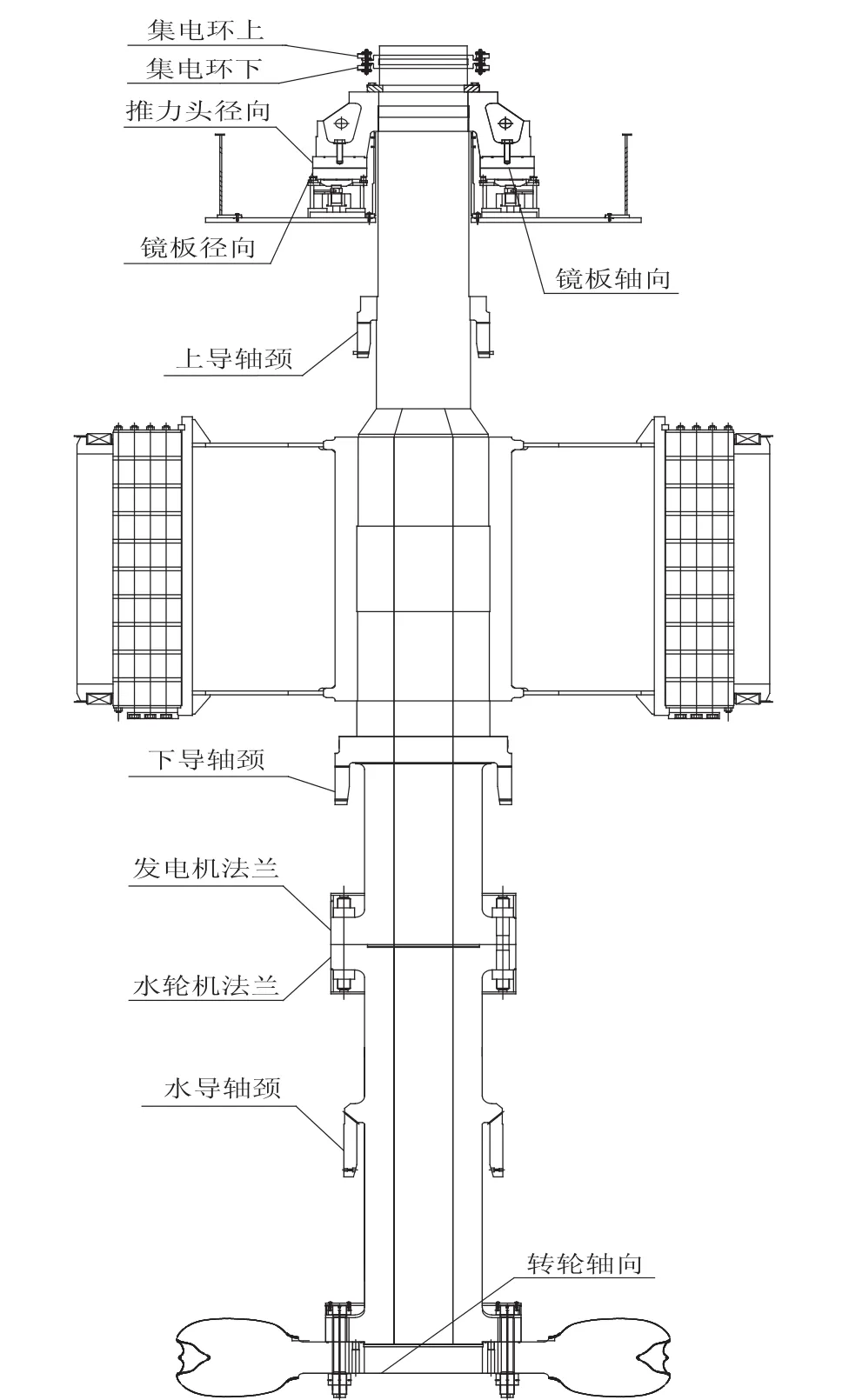
圖1 機組盤車及軸線測量剖面圖
本文以4號機組為例介紹機組軸線數據分析方法,機組盤車數據如表1所示,表中省略了集電環、發電機法蘭、水輪機法蘭及轉輪軸向盤車數據。
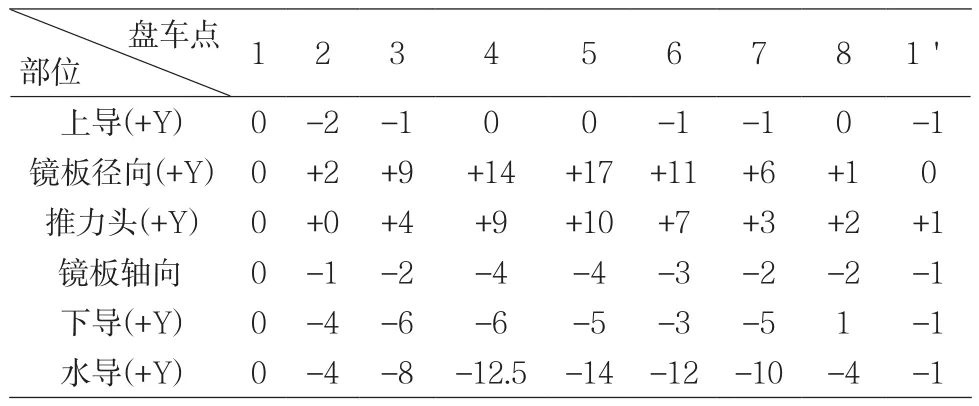
表1 4號機組盤車數據單位:0.01 mm
從表1的數據可以得出鏡板最大擺度為0.08 mm,與推力頭同心度為0.04 mm,滿足后續盤車要求。根據鏡板相對上導的理論擺度為正弦曲線這一概念,假設其曲線為Y=A+B×sin(X+C),根據表1得出鏡板徑向相對上導徑向的擺度如表2所示。

表2 鏡板徑向相對上導徑向的擺度值單位:0.01 mm
然后采用Matlab軟件的lsqcurvefit函數對鏡板相對上導擺度值進行最小二乘非線性擬合,其表達式如下:
clear all;
x=[0,45,90,135,180,225,270,315];
y=[1,4,10,14,17,12,7,1];
fun_curve=@(a,t) a(1)+a(2)×sin((t+a(3))× pi/180);
x0=[0,45,90];
parameter = lsqcurvefit(fun_curve,x0,x,y);
A=parameter(1);
B=parameter(2);
C=parameter(3);
subplot(2,1,1);
plot(x,y,x,fun_curve(parameter,x),'r');
xlabel(‘角度’);
title(‘y值’);
title(‘y=A+B×sin[(x+c)×pi/180]曲線擬合’);
legend(‘原始曲線','擬合后曲線’);
subplot(2,1,2);
fai=0:1:360;
y_value=A+B×sin((fai+C)×pi/180);
plot(fai,y_value);
xlabel(‘角度’);
ylabel(‘Y值’);
title(‘y=A+B×sin[(x+c)×pi/180]曲線擬合’);
legend(‘理論曲線’);
通過擬合程序在Matlab中運行,可以在Matlab工作區中得到 A=8.25,B=-7.89,C=102°。當 a=0°、45°……315°時其理論擺度值為y_value。其測量擺度值與理論擺度值偏差很小,如圖2和表3所示;其理論曲線是正弦曲線,如圖3所示;綜合以上結果,可判斷盤車數據準確,可以作為軸線調整的依據。
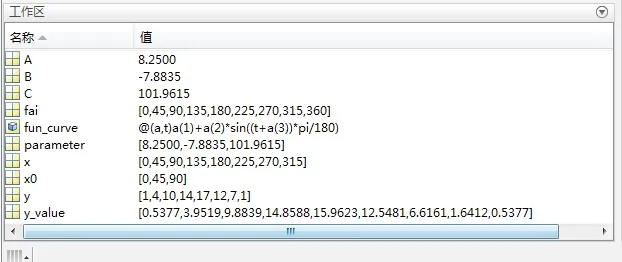
圖2 Matlab工作區顯示計算結果
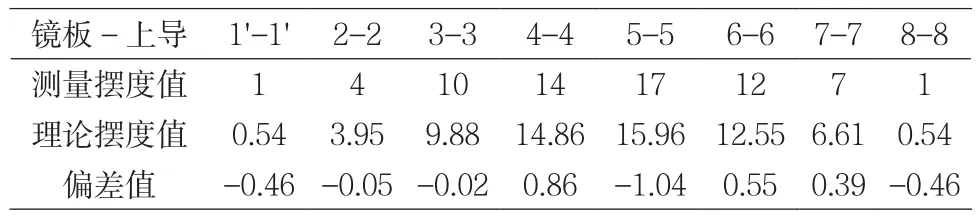
表3 測量擺度值與理論擺度值偏差表單位:0.01 mm
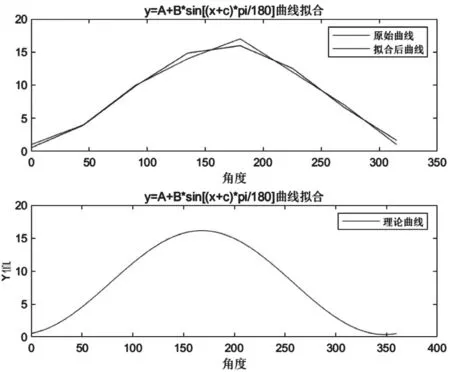
圖3 Matlab機組盤車數據擬合曲線
4 機組軸線調整
當機組整體盤車出現軸線與其旋轉中心線不重合時,計算下導、水導靜擺度,其方法是將下導和水導各點靜擺度值分解成X,Y分量:
x=r×cos(angle×PI/180)
y=r×sin(angle×PI/180)
然后根據擺度值求解下導、水導與機組軸線的理論中心偏差,通過分斷面刮磨發電機推力頭處的鎖緊卡環進行機組軸線的調整,即根據計算發電機推力頭處卡環刮磨量,達到下導和水導處的擺度值盡可能的小。
δ-卡環最大點刮磨量;
D-推力頭的直徑;
Φba-軸線傾斜方向上的最大靜擺度;
L-推力頭距水導處百分表的距離。
5 結束語
伴隨著科學技術的高速發展,Matlab計算已成為工程領域應用最為廣泛的軟件之一,其強大的計算平臺,可以解決實際工程中最優化問題,也可通過對算法的編程實現相應的最優化計算與仿真,能夠有效指導和解決水電站施工中遇到的實際問題,幫助技術人員完成復雜計算與仿真等工作。
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
學習月刊(2015年21期)2015-07-11 01:51:44
