擴展卡爾曼神經網絡在鍋爐汽包水位控制中的應用
2018-10-12 05:48:38劉曉悅馮立強
現代電子技術 2018年19期
劉曉悅 馮立強
摘 要: 工業鍋爐正常運行的一個重要指標是汽包水位,然而實際運行中出現的虛假水位現象對鍋爐的正常運行產生很大影響。當前常規的調節策略是以PID為核心的三沖量策略,但是由于PID的調控效果對被控對象的數學模型依賴度高,而汽包水位難以建立精確的模型,此方案的實際效果并不理想。基于此,引入擴展卡爾曼神經網絡方法。此方法具有不依賴模型的特點,并依據此方法設計網絡控制器(EK?NNC),目的是替換常規PID控制器。最后給出EK?NNC與常規PID的對比結果。
關鍵詞: 擴展卡爾曼算法; 人工神經網絡; 工業鍋爐; 水位控制; 三沖量; 實驗仿真
中圖分類號: TN876?34; TP183 文獻標識碼: A 文章編號: 1004?373X(2018)19?0096?04
Abstract: The drum water level acts as an important indicator of the normal operation of industrial boiler, but its false phenomenon in actual operation greatly influences the normal operation of the boiler. The three?impulse strategy takes PID as its core, but the control effect of PID has high dependency on the mathematical model of the controlled object, and it is difficult to establish the accurate model of drum water level, so the practical control effect of this strategy is unsatisfied. On this basis, an extended Kalman neural network method is introduced, which is independent of the mathematical model. The extended Kalman neural network controller (EK?NNC) was designed to replace the conventional PID controller. The comparison results of EK?NNC and conventional PID are given.
Keywords: extended Kalman algorithm; artificial neural network; industrial boiler; water level control; three?impulse; experimental simulation
0 引 言
鍋爐在工業生產及人們生活中具有重要地位。鍋爐作為能量轉換設備,將燃料中的化學能轉換成熱能后對汽包中的水加熱,產生的蒸汽帶動發電機或是負載進行工業生產。其中汽包水位間接反映工業鍋爐運行的平穩性與安全性,是鍋爐的重要參數。水位過高,影響汽水分離器的正常分離過程,而且如果汽水分離不充分,蒸汽中含水過多會加速汽輪機葉片的老化;水位過低,蒸汽產量不足影響正常生產,如果水位持續走低,就可能發生“燒干鍋”甚至爆炸的危險情況。
鑒于鍋爐汽包水位在鍋爐運行中的重要性,對其研究不斷加深。其中,文獻[1]將分數階理論應用到水位調控中,但是確定最佳有理逼近函數往往不是容易的事。文獻[2]提出一種基于粒子群優化的PID水位調節算法,對PID參數進行調整,但是粒子群算法具有容易陷入局部極值點的缺陷。文獻[3?5]討論了模糊理論在水位調節下的應用。文獻[6?7]提出模糊神經網絡在水位控制中的應用。其中文獻[3?7]都引用了模糊理論,但是模糊規則復雜,隸屬度函數的確定依賴經驗是這些方法的缺點。
文獻[8]提出擴展卡爾曼神經網絡算法并且仿真效果良好,因此本文引入此方法并在此基礎上設計擴展卡爾曼神經網絡控制器(EK?NNC)。最后分別給出在三沖量調控方案下EK?NNC與傳統方法的對比仿真結果。
1 鍋爐汽包結構與常規控制
1.1 汽包結構
鍋爐汽包的結構如圖1所示。汽包中儲存的是蒸汽和水,二者的儲量通過水位來表現。從圖1可知,給水流量[W]作為輸入,蒸汽流量[S]作為輸出,理想情況下,如果[W]與[S]之和為0,那么水位[H]就處于穩定狀態。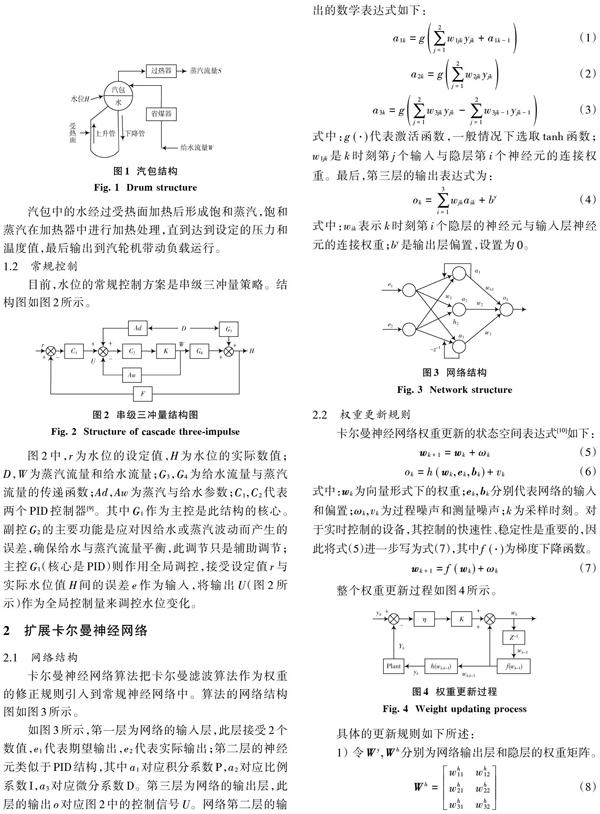
汽包中的水經過受熱面加熱后形成飽和蒸汽,飽和蒸汽在加熱器中進行加熱處理,直到達到設定的壓力和溫度值,最后輸出到汽輪機帶動負載運行。
1.2 常規控制
目前,水位的常規控制方案是串級三沖量策略。結構圖如圖2所示。
圖2中,[r]為水位的設定值,[H]為水位的實際數值;[D],[W]為蒸汽流量和給水流量;[G3],[G4]為給水流量與蒸汽流量的傳遞函數;[Ad],[Aw]為蒸汽與給水參數;[C1,C2]代表兩個PID控制器[9]。其中[G1]作為主控是此結構的核心。副控[G2]的主要功能是應對因給水或蒸汽波動而產生的誤差,確保給水與蒸汽流量平衡,此調節只是輔助調節;主控[G1](核心是PID)則作用全局調控,接受設定值[r]與實際水位值[H]間的誤差[e]作為輸入,將輸出[U](圖2所示)作為全局控制量來調控水位變化。
2 擴展卡爾曼神經網絡
2.1 網絡結構
卡爾曼神經網絡算法把卡爾曼濾波算法作為權重的修正規則引入到常規神經網絡中。算法的網絡結構圖如圖3所示。
如圖3所示,第一層為網絡的輸入層,此層接受2個數值,[e1]代表期望輸出,[e2]代表實際輸出;第二層的神經元類似于PID結構,其中[a1]對應積分系數P,[a2]對應比例系數I,[a3]對應微分系數D。第三層為網絡的輸出層,此層的輸出[o]對應圖2中的控制信號[U]。網絡第二層的輸出的數學表達式如下:
3 仿真與對比
本文采用Matlab軟件進行測試,以鍋爐汽包水位控制為例,對比EK?NNC與常規PID的調控效果。本次仿真分別把常規PID和EK?NNC作為主控([C1]) 。設定相關參數:[Ad,Aw]均為0,017 5,[K=20],[G3=0.037S(8.5S+1)],[G4=-0.3S+3.615S+1],[F=1]。
1) 傳統PID控制器(主控)的三個參數(P,I,D)分別設置為:3,0.35,1.1。
2) 設置 EK?NNC的學習速率[α=0.05],卡爾曼測量因子[η=0.01],網絡初始權重設定為0~1之間的隨機數,訓練次數1 000次。偏置[bh]的初值為0。將實際水位測量值,主控制器的控制信號進行歸一化處理后,對網絡進行訓練,最后將網絡替換為圖2中的[C1]。
圖5是階躍響應,其中在30 s時加入強度為0.1的白噪聲,持續時間1 s。
為了便于比較,圖5中涉及的性能指標見表1。
從表1可以看出,當有干擾時EK?NNC克服干擾的能力強于常規PID控制器。
4 結 語
神經網絡憑借其強大的泛化能力與良好的容錯性而被愈加頻繁地應用于多個領域。本文在卡爾曼神經網絡算法基礎上,設計擴展卡爾曼神經網絡控制器。通過仿真對比,可以看出EK?NNC在上升時間、超調量、調節時間這三方面的調控效果好于常規PID控制,同時也體現了EK?NNC控制器的有效性。
參考文獻
[1] 秦君琴,馬華杰,李興財.分數階PID控制器在火電廠鍋爐汽包水位控制中的應用研究[J].西南師范大學學報(自然科學版),2014,39(7):58?61.
QIN Junqin, MA Huajie, LI Xingcai. Application of fractional PID controller in boiler drum water level control in thermal power plant [J]. Journal of Southwestern Normal University (natural science edition), 2014, 39(7): 58?61.
[2] 劉景芝,孫偉,張紹娟.汽包水位粒子群?PID優化控制[J].計算機工程與應用,2009,45(21):239?241.
LIU Jingzhi, SUN Wei, ZHANG Shaojuan. Optimal control of drum water level particle swarm optimization?PID [J]. Computer engineering and applications, 2009, 45(21): 239?241.
[3] 婁偉,劉向東.模糊控制在鍋爐汽包水位控制系統中的應用[J].鍋爐技術,2010,41(1):27?31.
LOU Wei, LIU Xiangdong. Application of fuzzy control in boiler drum water level control system [J]. Boiler technology, 2010, 41(1): 27?31.
[4] 付立華,周洪.基于變論域模糊PID的鍋爐汽包水位控制系統仿真研究[J].河南工程學院學報(自然科學版),2015,27(3):52?56.
FU Lihua, ZHOU Hong. Simulation study of boiler drum water level control system based on variable universe fuzzy PID [J]. Journal of Henan Institute of Engineering (natural science edition), 2015, 27(3): 52?56.
[5] 榮盤祥,高生宇,王子旭,等.工業鍋爐汽包水位控制系統的優化[J].哈爾濱理工大學學報,2015,20(6):78?82.
RONG Panxiang, GAO Shengyu, WANG Zixu, et al. Optimization of water level control system for industrial boiler drum [J]. Journal of Harbin University of Science and Technology, 2015, 20(6): 78?82.
[6] 黃永杰.基于模糊神經網絡的燃煤鍋爐過程控制應用探析[J].煤炭技術,2013,32(4):229?231.
HUANG Yongjie. Application of fuzzy neural network in process control of coal fired boiler [J]. Coal technology, 2013, 32(4): 229?231.
[7] 李晶,王旭剛.基于模糊PID的模型參考自適應IMC汽包水位控制[J].熱力發電,2015,44(2):96?100.
LI Jing, WANG Xugang. Model reference adaptive IMC drum level control based on fuzzy PID [J]. Thermal power generation, 2015, 44(2): 96?100.
[8] SENTO A, KITJAIDURE Y. Neural network controller based on PID using an extended Kalman filter algorithm for multi?variable non?linear control system [C]// The Eighth International Conference on Advanced Computational Intelligence. Chiang Mai: IEEE, 2016: 302?309.
[9] 張哲,左為恒,左培新.基于IMC的鍋爐汽包水位控制系統仿真研究[J].熱力發電,2013,42(8):59?62.
ZHANG Zhe, ZUO Weiheng, ZUO Peixin. Simulation research of boiler drum water level control system based on IMC [J]. Thermal power generation, 2013, 42(8): 59?62.
[10] GUO Xiucheng, LI Yan, YANG Jie. Active traffic induction control based on state space neural network and extended Kalman filter [J]. Journal of Southeast University (English edition), 2010, 26(3): 466?470.
