淺談雷達與AIS信息融合技術在控制河段通行指揮中的應用
2018-10-15 07:57:04曾科偉
中國水運 2018年10期
曾科偉
(長江重慶航道局,重慶 401147)
控制河段是指具有彎曲、狹窄、灘險等特征,通視條件差,會船避讓困難,導致船舶同一時間段內只能單向通行的航道河段[1]。控制河段大多灘多水急,一旦上下行船舶同時進槽會讓,輕則出現緊迫局面影響船舶通行效率,重則引發船舶海損事故,導致控制河段斷航,造成重大的經濟損失。為確保控制河段航道的暢通安全,船舶在通過時必須按有關規定接受通行信號臺的指揮,根據揭示信號單向、有序地通行。
隨著長江干線數字航道蘭家沱至鳊魚溪段建設工程的建成投用,初步實現了控制河段通行信號指揮從傳統被動指揮到實時監控指揮的轉變,即擺脫了信號員先通過人工瞭望觀測和VHF電話聯系獲取上下水船舶信息和航行狀態,然后根據通行規則發出信號指令的傳統指揮方式,依托AIS可以遠距離實時監控船舶位置,避免船舶不報、謊報船位,有效提高了控制河段通行效率和安全水平。但由于AIS信息受控制河段周邊山體等客觀因素和自身發送機制的影響,時常出現信號丟失、延時等情況,嚴重制約了通行指揮的準確性。為此,將雷達和AIS的融合信息技術應用于通行信號指揮中,可實現對目標船舶的自動識別,提高目標船舶的監測和跟蹤精度,提升信號指揮工作效率和服務質量。
1 雷達和AIS功能及特點
1.1 獲取目標信息的方式
雷達發射機通過雷達天線定時向控件發射射頻脈沖信號,并進行方位掃描,當接觸到航行中的船體后,會產生回波,雷達接收機收到信號后,經過處理在雷達終端界面進行顯示。這是主動獲取目標信息的方式。
AIS(Automatic Identification System, 船舶自動識別系統)由基站設施和船載設備共同組成[2],船載AIS傳感器主要包括GPS/DGPS/GNSS、陀螺羅經、計程儀等,如圖1所示。船舶在航行過程中根據信號發送機制發送船舶動靜態信息,然后通過岸基AIS臺站接收船載AIS信息,獲取船舶狀態。這是被動獲取目標信息的方式。

圖1 船載AIS基本構成
1.2 獲取目標信息的種類
雷達可以獲取周邊水域所有運動目標、固定目標等信息,雷達目標回波還可以在一定程度上反映目標的大小和形狀,但雷達無法獲取目標物的靜態關聯信息,如目標物名稱、類型等。
AIS信息大致可分為四類[3]:一是船舶位置、對地航向和速度、艏向、航跡等動態信息;二是船舶識別碼MMSI、噸位、船名和呼號、船長和船寬、船舶類型等靜態信息;三是船舶吃水、危貨類型、目的港等與航行有關的信息;四是航行警告等與船舶安全有關的短電文。
1.3 獲取目標信息的精度
雷達的目標數據是通過對目標自動跟蹤處理中的航跡外推、航跡相關等形成的目標航跡線計算出來的,根據回波時長隨目標距離的增加而延長,存在一定的滯后性。目標位置信息一般以雷達為坐標原點的極坐標系表示,方位線數據精度隨目標與雷達之間的距離增加而變差[3]。
AIS的目標位置、航速、航向和船首向數據來源于船載GPS和羅經,是即時運動參數或人工輸入的船舶實際數據,精準度較高。目標位置信息一般直接采用WGS-84坐標系的經緯度表示。但受發送機制的制約,AIS信號發送的時間間隔受目標速度、方位變化等影響。
1.4 兩者特點比較
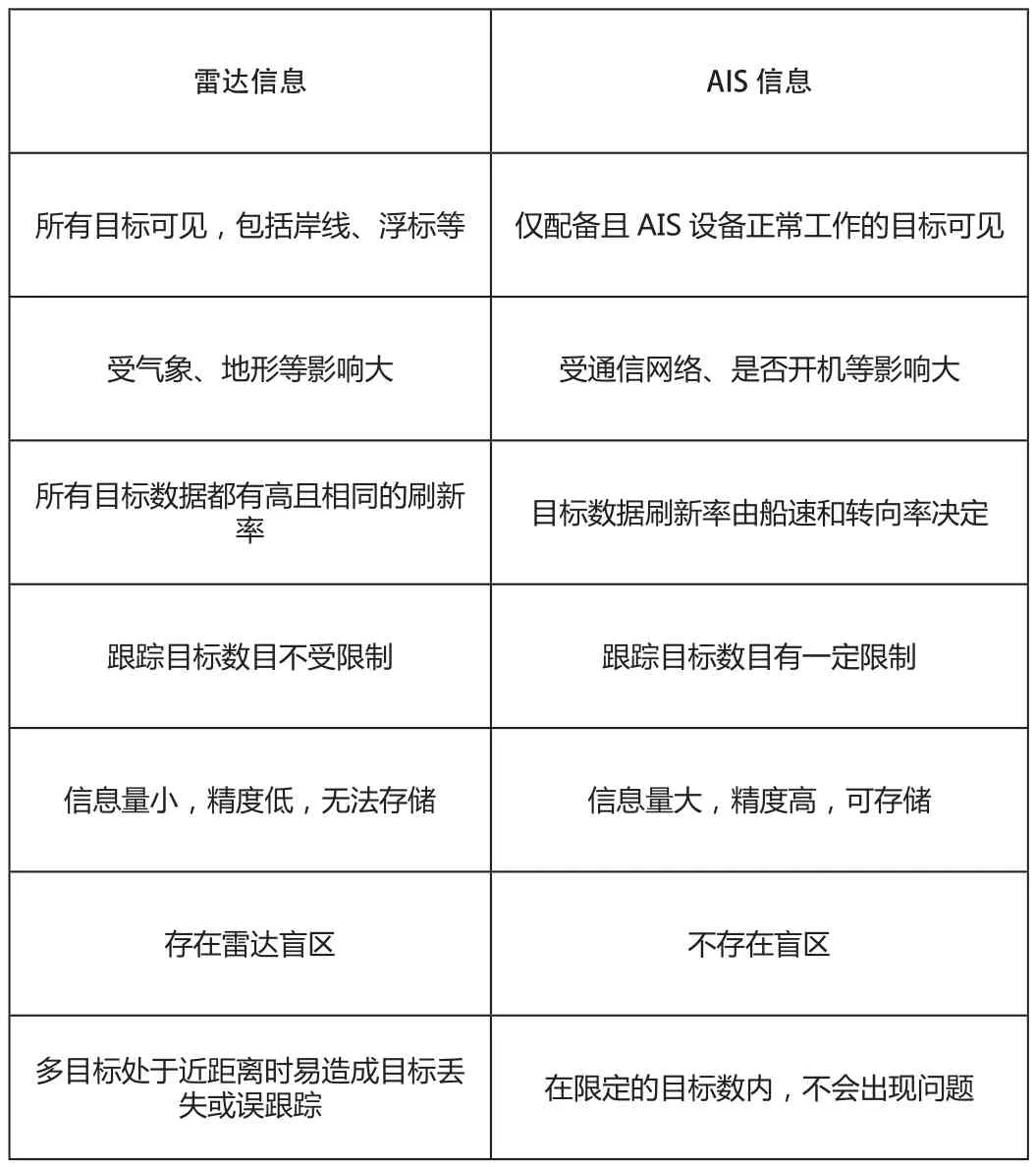
表1 雷達與AIS信息特點比較
表1中,通過對雷達和AIS信息的功能和特點分析發現,兩者雖各有優勢,但也存在一定的局限性,單獨使用均難以滿足通行信號指揮的需求。為此,我們可以將雷達和AIS信息融合起來,實現信息互補,達到輔助通行指揮的目的。
2 雷達和AIS的信息融合
2.1 信息融 合原理
信息融合可以廣義地概述為把來自多種傳感器的信息或數據,根據既定的規則,分析、結合為一個綜合性的情報,并在此基礎上為用戶提供全面、精確的信息過程[4]。在該項技術中,多傳感器系統是信息融合的硬件基礎,多源信息是信息融合的處理對象,分析和綜合處理是信息融合的核心[5]。
信息融合的模式主要有兩種:集中式融合和分布式融合。集中式融合是指各傳感器將接收到的數據都傳到數據融合中心,在數據融合中心進行處理并做出判斷;分布式融合是指各傳感器利用自己的測量單獨做出判斷,將決策信息傳送到數據中心,數據中心再進行進一步的處理,如圖2所示。與集中式結構相比,分布式結構能以較低的費用獲得較高的可靠性和可用性,可以減少數據總路線的頻寬和數據處理的要求,同時獲得相近于集中式結構的精度。由于雷達與AIS都有各自獨立的信息處理系統,因此,采用分布式結構較為合理。
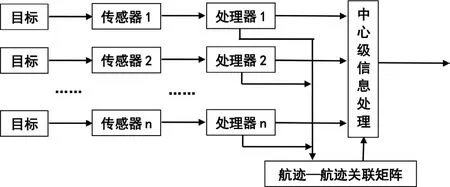
圖2 分布式信息融合系統
2.2 信息融合步驟
根據信息融合的分布式融合模型,結合雷達和AIS目標數據特點,建立信息融合模型。

圖3 信息融合模型
信息融合如上圖主要分為三個步驟:數據預處理(坐標變換和時間校準)、航跡關聯和航跡融合。
2.2.1 數據預處理
在數據融合過程中,由于雷達對目標的檢測時間和空間基準點與AIS系統不同,雷達的目標位置是通過極坐標的距離和方位來描述的,而AIS是通過船載GPS來獲取目標位置數據的,通過地理坐標的經度與緯度來描述。因此,為實現二者的融合,首先需要對二者數據進行預處理,預處理的內容包括坐標變換和時間校準。
(1)坐標變換。鑒于二者對目標位置的描述方法不同,需要將二者信息描述進行統一,都轉換到直角坐標系中。
(2)時間校準。雷達的掃描周期一般為15r/min-30r/min,比較固定。AIS廣播受發送機制的影響,其動態信息的發送間隔隨著船舶的狀態不同而發生變化。因此,需要將二者目標信息進行時間上的校準。常用的校準方法有三種:最鄰近規則試探法、自適應時間對準、AIS信息內插或外推。
2.2.2 航跡關聯
雷達與AIS信息融合的關鍵之處在于目標航跡關聯,即通過信息處理來判斷二者傳輸回來的兩條目標軌跡是否為同一目標,也就是處理二者在檢測范圍內目標重復跟蹤的問題,從某些程度上來講,也可以認為航跡關聯就是目標跟蹤信號的去干擾和去重復的過程。在周邊環境干擾較少且二者目標軌跡相距較近的條件下,實現航跡關聯較為簡單。但在檢測區域內,目標物較多、目標物間距離較近、且周邊環境干擾因素較多的情況下,航跡關聯就變得相對復雜。
目前,航跡關聯算法主要歸納為兩類:一類是統計算法,常用的算法有加權法、統計雙門限法、修正法、最近鄰域法、序貫法、K近鄰域法、修正的K近鄰域法、經典分配法和廣義分配法等;另一類是模糊算法,常用的算法有模糊經典分配法、模糊綜合函數法、模糊雙門限法和模糊綜合決策法等。

表2 信息融合方法比較
2.2.3 航跡融合
通過航跡關聯檢驗后,可以確定同一目標的航跡,此時便可以進行目標航跡的融合處理,得到新的目標狀態。目前,常用的航跡融合算法主要為統計加權法,即預先設定融合加權的比重,將二者的檢測信息根據比重進行加權合并。值得一提的是,當AIS接收的信息丟失或者雷達探測數據丟失時,二者的融合跟蹤顯得更加重要,進一步提高了目標跟蹤的精度和可靠性。在實際操作過程中,二者融合的準確度主要受二者配置的傳感器精度的影響。
信息融合處理方法按技術方法和組成方式可分為多種,如表2所示:
3 結語
長江上游控制河段通航環境復雜,監測目標種類多、數量大,環境干擾明顯,實時性和精確度要求高,如何提高通行信號指揮過程中船舶監測的準確性和可靠性,是長期困擾長江航道工作者的一個難題。雷達和AIS在控制河段的融合應用,為今后的信號指揮智能化拓展了思路。但在雷達與AIS信息融合的實際操作中,還有許多現實問題,如各類算法的優化、周邊環境干擾因素的處理、加權比重的合理分配等,需要在今后的研究工作中進一步解決。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
今日農業(2021年19期)2022-01-12 06:16:36
船舶(2021年4期)2021-09-07 17:32:22
中老年保健(2021年11期)2021-08-22 03:15:44
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代出版(2020年3期)2020-06-20 07:10:34
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2018年11期)2018-08-04 03:25:42
