導航測量型天線相位中心穩定度測量與分析
2018-10-18 06:17:56秦順友張志華
無線電通信技術 2018年6期
秦順友,張志華
(中國電子科技集團公司第五十四研究所,河北 石家莊050081)
0 引言
天線相位中心是天線的重要性能指標之一[1],在很多現代科學和工程應用中,天線相位中心的位置起著非常重要的作用。例如在地面站反射面天線應用系統中,饋源喇叭的相位中心必須精確安裝在反射面天線的焦點位置,確保反射面天線具有良好的性能[2],這樣要求精確測量饋源喇叭的相位中心[3];又如在星載合成孔徑雷達系統,采用天線相位中心偏移方位多波束技術提高方位分辨率[4];再如在GNSS(Global Navigation Satellite System)應用系統中,通過測量載波信號衛星和地面站地之間的傳輸時延進行測距解算,而時延校準參考點是發射天線和接收天線的相位中心[5],因此測量導航天線相位中心測量精度及其穩定度直接關系到導航系統測距的解算精度[6]。對于衛星導航天線,不僅關心天線的相位中心,而且其相位中心穩定度亦是很重要的[7]。目前關于衛星導航天線相位中心測量的文獻很多[8],而相位中心穩定度測量研究文獻很少。因此本文論述了導航測量型天線相位中心穩定度的概念及其測量方法。
1 相位中心穩定度
在IEEE標準中,天線相位中心定義為:存在與天線相關的一個點,如果將它作為輻射遠場的球面圓心,則輻射球面上給定場分量的相位應基本是一個常數,至少在輻射的關鍵區域滿足[9]。相位中心可以簡單理解為天線輻射電磁波的輻射源中心;從數學上理解相位中心可描述為天線遠場區輻射場的等相位面的曲率中心。如果天線輻射的電磁波是一個球面波,在任意給定頻率下,使天線相位方向圖φ(θ,φ)與θ、φ無關的坐標原點,稱為球面波的相位中心,通常就是球心。反之,天線不同區域的等相位面有不同的曲率中心。
在整個空間,具有唯一相位中心的天線實際上是不多的,而絕大多數天線只在主瓣某一范圍內或是以某點為參考點時,在所關心天線主波束一部分的角度范圍內,天線的相位保持恒定,由此部分等相位面求出的相位中心,叫做天線的視在相位中心[10]。天線在不同切割面上可能有各自的相位中心,如果它們的相位中心不重合,說明天線有相散。通常采用折衷的方法,求出天線在空間不同切割面相位中心平均值,稱為天線的平均相位中心。
相位中心穩定度定義為:由通過天線主波束相位峰峰值的一半所對應的波程距離,稱為相位中心的穩定度,用公式表示為:
(1)
式中:
Δm為天線相位中心的穩定度;
Δφ為天線主波束相位方向圖的峰值起伏;
λ為工作波長。
由天線相位中心定義可知:天線不同切割面的相位中心位置是不同的,相應地其相位中心的穩定度是不同的。計算不同切割面相位中心穩定度的平均值,稱為天線相位中心的平均穩定度,它表征了天線相位中心在整個空域的特性。
2 相位中心穩定度測量
天線相位中心穩定度是通過測量天線相位方向圖來實現的,天線相位方向圖測量常用方法有:遠場測量方法、近場測量方法和緊縮場測量方法[11]。利用實測相位方向圖,確定天線相位中心位置常用方法有:移動參考點法[12]、關鍵點法(通常三點法或五點法)[13]、三天線法[14]和曲線擬合法(也稱最小二乘法)[15]。這里介紹在微波暗室遠場法測量衛星導航測量型天線相位方向圖,利用移動參考點法確定天線相位中心的位置。
圖1為利用矢量網絡分析儀測量導航測量型天線相位中心穩定度的原理圖。圖中R為收發天線之間的測試距離,R應滿足天線遠場測試距離條件,即R≥2D2/λ(D為待測天線最大尺寸,λ為工作波長)。圖中待測天線安裝在測試轉臺上,且轉臺具有平移裝置和極化軸旋轉裝置。平移裝置用于實現待測天線相對轉臺的方位軸前后或左右的移動,用來測量待測天線相位中心的位置;而極化軸旋轉裝置實現待測天線繞水平軸轉動,用于測量不同切割面的相位方向圖,確定天線不同切割面的相位中心位置。
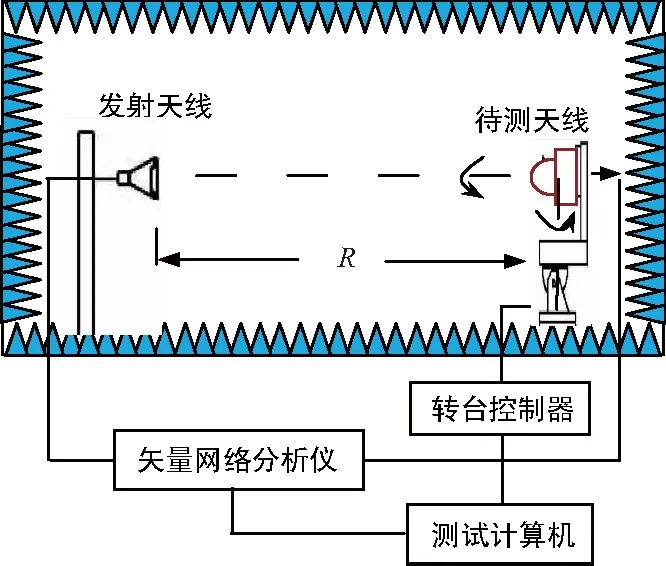
圖1 導航天線相位中心穩定度測量的原理
天線相位方向圖測量就是測量待測天線遠場區球面上的相位。相位是一個相對量,不論在什么情況下,都是將待測信號與基準信號比較獲得相對相位值。
在微波暗室,利用移動參考點法測量導航天線相位中心穩定度的原理方法是:首先按照圖1所示的原理圖建立測試系統,用矢量網絡分析儀測量天線的相位方向圖,依據在天線主波束范圍內所測量的相位方向圖形狀,確定天線相位中心參考點移動方向[16],重復測量天線相位方向圖,直到在所測量的天線主波束范圍內,測出的相位方向圖特性等相位為止或滿足相位波動要求,此時天線的相位中心與轉臺轉軸重合,用機械的方法測定天線相位中心的位置[17];測定天線相位中心位置以后,然后轉動切割面,同理完成天線不同切割面的相位中心位置的測量。實際上,天線不同切割面的相位中心位置可能不一致,甚至相差較大,此時精確測量出不同切割面相位中心的位置,采用折衷方法,求出天線平均相位中心位置。最后,重新安裝天線,使天線轉臺中心與測量的天線平均相位中心位置重合,測量天線不同切割面的相位方向圖,微調相位中心的位置,直到在測量的主波束角度范圍內,所有不同切割面相位方向圖的起伏均達到要求值為止。
利用實際測量的不同切割面的相位方向圖,求出在關注的測量主波束角度范圍,天線相位方向圖波動的最大值和最小值。不同切割面相位波動的最大值分別用φmax1,φmax2,……φmaxN表示,最小值分別用φmin1,φmin2,……φminN表示,則不同切割面相位中心穩定度為:
(2)
天線相位中心的平均穩定度為:
(3)
3 測量實例與分析
以一個測量型導航天線相位中心穩定度測量為例,說明導航測量型天線相位中心穩定度測量原理和方法。
圖2為一個測量型導航天線,該天線工作于1 157~1 278 MHz和1 557~1 612 MHz兩個頻段,覆蓋GPS的L1/L2波段、GLONASS的L1/L2波段和BDS的B1/B2/B3 波段,天線極化為右旋圓極化,天線采用多饋點和完全對稱的天線結構設計,實現天線相位中心與幾何中心的重合,實現高精度測量;該天線增益高,方向圖波束寬,對低仰角的導航衛星信號接收效果好。
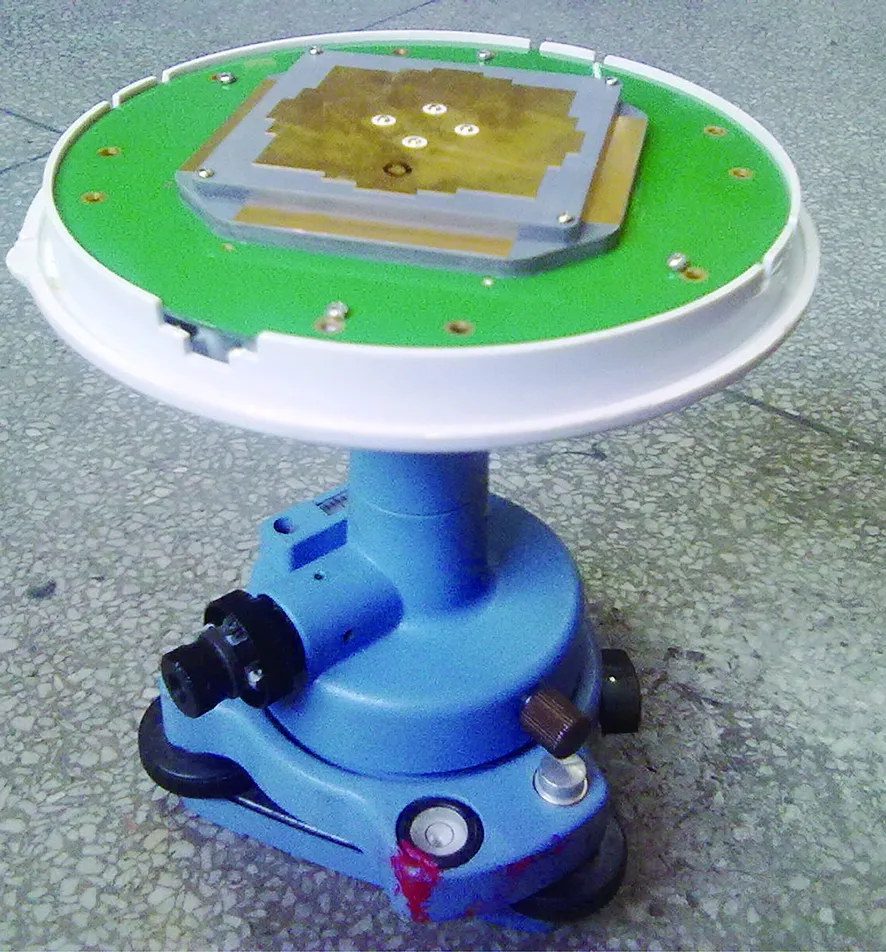
圖2 測量型導航天線
圖3為在微波暗室測量衛星導航測量型天線的實際裝置圖。圖中發射天線和待測天線均為導航測量型天線,其區別是待測天線為有源天線,即低噪放大器與天線單元集成在一起,而發射天線為無源天線,天線工作頻段和極化是一樣的。這樣使用的目的是減少微波暗室多重反射對測量結果的影響,因為發射天線發射右旋圓極化波,微波暗室一次發射為左旋圓極化波,從而減少測試環境反射的影響。

圖3 導航天線相位中心穩定度測量裝置
實驗時,首先通過測量不同切割面相位方向圖,確定不同切割面相位中心位置,計算出導航測量型天線的平均相位中心的位置;然后調整天線平均相位中心位置與轉臺旋轉中心重合,測量不同切割面的相位方向圖。圖4給出了測試頻率為1 207 MHz,在0°切割面、22.5°切割面、45°切割面、67.5°切割面以及90°切割面的相位方向圖。表1給出了在天線主波束±50°角度范圍內,天線相位中心穩定度測量結果。由測量不同切割面天線相位中心穩定度可獲得天線相位中心平均穩定度≤±2.31 mm。
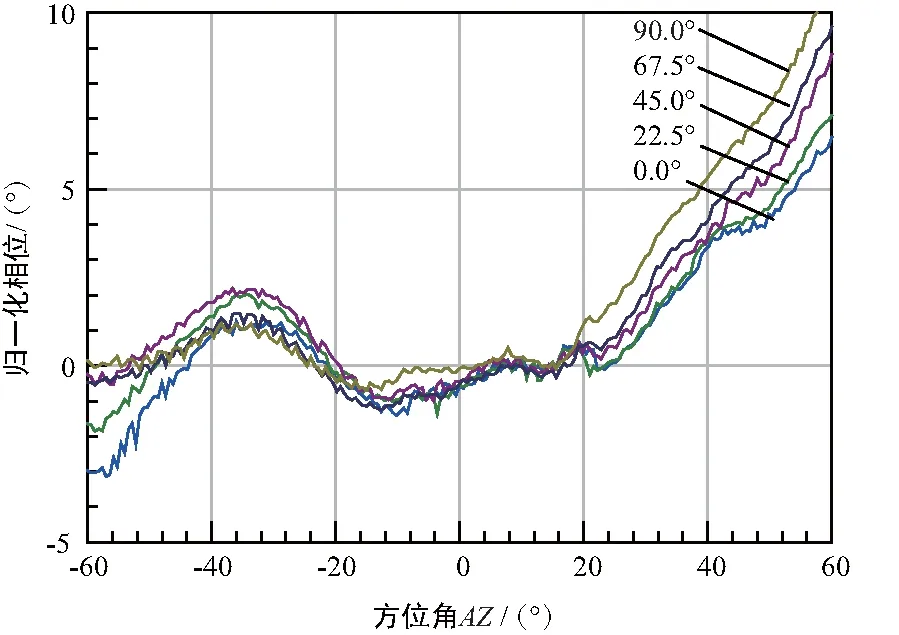
圖4 頻率為1 207 MHz的不同切割面的相位方向
表1 頻率為1 207 MHz的相位中心穩定度測量結果
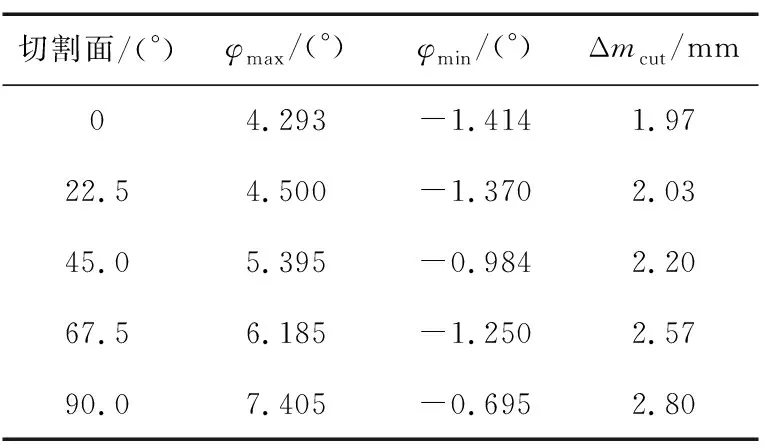
切割面/(°)φmax/(°)φmin/(°)Δmcut /mm04.293-1.4141.9722.54.500-1.3702.0345.05.395-0.9842.2067.56.185-1.2502.5790.07.405-0.6952.80
圖5給出了測試頻率為1 602 MHz,在0°切割面、22.5°切割面、45°切割面、67.5°切割面和90°切割面的相位方向圖。表2給出了在天線主波束±50°角度范圍內,天線相位中心穩定度測量結果。由測量不同切割面天線相位中心穩定度可獲得天線相位中心平均穩定度≤±1.01 mm。
實驗結果表明:在不同切割面,天線相位中心及其穩定度是不同的。
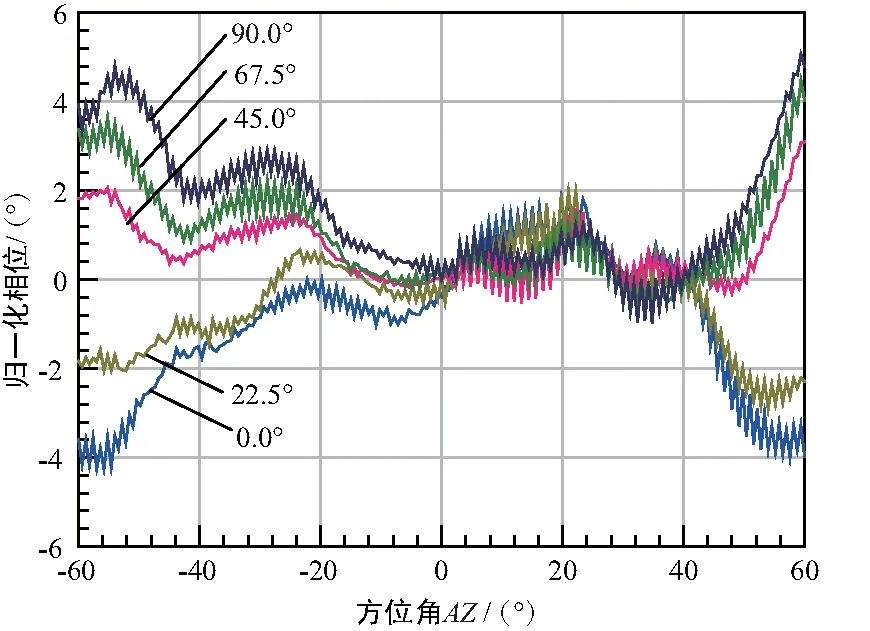
圖5 頻率為1 602 MHz不同切割面的相位方向
表2 頻率為1 602 MHz的相位中心穩定度測量結果
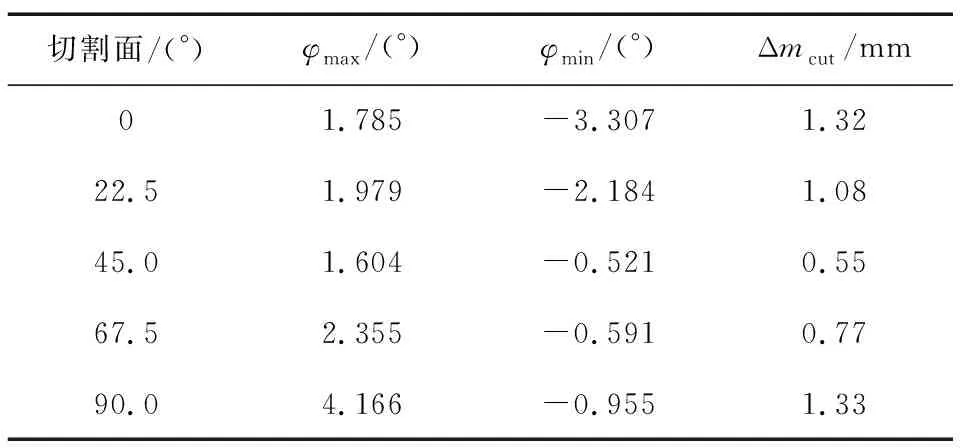
切割面/(°)φmax/(°)φmin/(°)Δmcut/mm01.785-3.3071.3222.51.979-2.1841.0845.01.604-0.5210.5567.52.355-0.5910.7790.04.166-0.9551.33
4 結束語
衛星導航系統是通過時延測量實現測距的,而天線相位中心為時延測量基準點,因此衛星導航天線相位中心測量精度及其穩定度直接影響衛星導航系統的定位精度。本文簡述了利用矢量網絡分析儀測量導航天線相位中心及其穩定度的原理方法,提出通過測量不同切割面的相位方向圖來確定天線相位中心穩定度的方法,對衛星導航天線相位中心測量,特別是相位中心穩定度測量具有重要的參考價值。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
