反恐防暴機器人運動控制系統設計
2018-10-21 05:38:49顧輝丁亞峰何興臣
大科技·C版 2018年11期
顧輝 丁亞峰 何興臣
中圖分類號:TP242 文獻標識碼:A 文章編號:1004-7344(2018)32-0293-01
在機器人路徑規劃中,一般用到的有三種地圖,分別為特征地圖、拓撲地圖和柵格地圖。
機器人使用的三維激光雷達方案,因為掃描頻率高,在短時間內,掃描得到的點的數據十分龐大,所以對每個柵格來說,都可以用大量點的數據來推測它的屬性(是不可通行的障礙物還是可通行的平地、陡坡、高臺)。
建立一個柵格地圖,根據本機器人整體技術指標的需要和激光雷達精度的性能,柵格地圖的精度為500×500(mm),即每個柵格的長和寬都為500mm,整個地圖包含10×10個方格,即地圖長度為10個柵格,寬度為10個柵格。本系統通過激光雷達掃描環境后一般產生十幾萬個三維點坐標,所以將這些點根據它們的橫坐標和縱坐標映射到平面上的柵格中,同時保留這些點的高度信息。
由于反恐防暴機器人在野外環境執行任務時,會遇到凹凸不行的路面,此時運用激光雷達測量的環境高度會出現較大誤差,另外有時測的高度確實超出了機器人所能通過的閾值高度,但是如果是斜坡地形,則機器人同樣有可能通過(斜坡角度小于機器人能通過的斜坡角度閾值),所以本論文采用檢測一個柵格內的最高點和最低點的梯度差來判斷一個柵格的屬性。
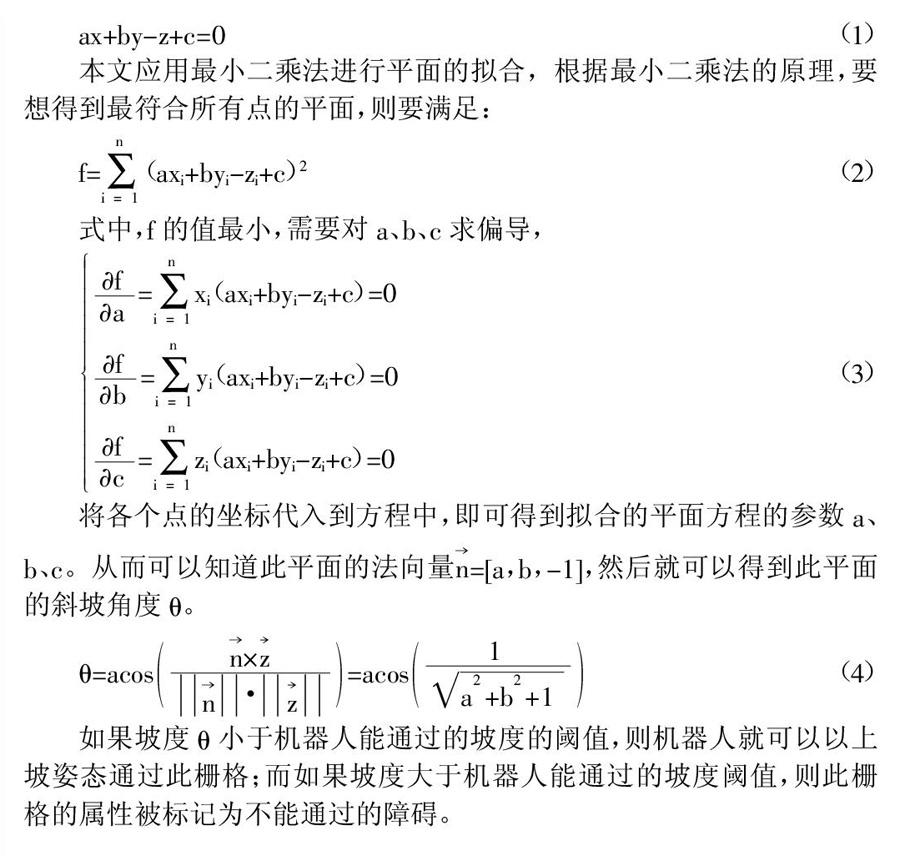
將掃描到的點云環境按照平面二維坐標虛擬成一個個規定大小的柵格,每個柵格中有若干個坐標點。在每一個柵格中,計算此柵格中最高高度和最低高度的高度差h,如果高度差h小于機器人能通過的高度的閾值H,則認為此柵格為平地或可通行的高臺、坡面地形。如果高度差h大于機器人能通過的高度的閾值H,則繼續檢測坡度。對這個柵格內的點運用最小二乘法進行擬合,擬合的平面模型為:
ax+by-z+c=0(1)
本文應用最小二乘法進行平面的擬合,根據最小二乘法的原理,要想得到最符合所有點的平面,則要滿足:
如果坡度θ小于機器人能通過的坡度的閾值,則機器人就可以以上坡姿態通過此柵格;而如果坡度大于機器人能通過的坡度閾值,則此柵格的屬性被標記為不能通過的障礙。
收稿日期:2018-9-10
