基于形狀曲線的機載LiDAR點云汽車類型識別
2018-10-22 06:12:02金國清
鐵道勘察 2018年5期
金國清
(中鐵第五勘察設計院集團有限公司,北京 102600)
1 概述
基于機載LiDAR點云的汽車類型識別技術可應用于數字高程模型生產[1,2],城市停車管理[3],交通管理[4]以及數字城市和智慧城市[5]等。目前,基于機載LiDAR點云的相關研究主要集中于汽車提取,即判定點云塊是否為汽車,對汽車類型判定[6]的研究較少,以下的研究對象僅考慮三廂車(Sedan)、掀背車(Hatchback)、越野車(SUV)和廂式貨車(VAN)等四種汽車類型。
目前的研究中,多根據汽車點云分塊俯視圖的長和寬等幾何特征信息來判定其是否為汽車[7-8],而這些幾何特征信息并非根本性指標,判斷的準確率有限,且不能對目標汽車類型進行判斷。考慮到汽車點云的側視圖中汽車形狀曲線與汽車類型密切相關,不同類型的汽車形狀具有顯著差異,可用為汽車點云分塊判斷的依據。這個方法的核心問題就是如何判斷兩個汽車形狀(側視圖)的曲線是否相似。由于汽車形狀曲線是二維曲線,因此該問題的本質就是如何評價兩條二維曲線是否相似。目前在圖像配準、目標檢測識別領域內常采用Hausdorff距離[9],離散Fréchet距離[10-11],動態時間規整(Dynamic Time Warping,DTW)距離[12]等幾種離散點集的相似度度量指標。
2 基于形狀的點云汽車類型識別方法
首先采用布料模擬濾波(Cloth Simulation Filter, CSF)將點云分為地面點和非地面點。在非地面點云中,采用空間鄰域分析(CCA)方法進行分塊,然后根據每個小塊的長度、寬度和高度,剔除所有汽車尺寸范圍外的點云分塊,最后對每個點云分塊建立其形狀曲線。
得到該形狀曲線之后,就可以與標準汽車形狀庫中的形狀曲線進行比較,計算相似度指標。如果最小的相似度指標小于設定的閾值,那么對應的標準汽車形狀的類型就是該點云的汽車類型,否則判定為非車目標(見圖1)。

圖1 汽車類型識別方法
2.1 汽車形狀構建方法
根據點云構建汽車形狀曲線是該方法中的關鍵步驟之一,其距離建立過程如下。
(1)將汽車點云分塊的激光點垂直投影到水平面上,建立該分塊的最小外包矩形,作為汽車的位置標定。
(2)取矩形的短邊中點連線作為基準線,取過該基準線的豎直面作為基準面。考慮到激光點云為離散的不規則點云,在基準面左右設置緩沖區。緩沖區厚度一般為2~3倍的平均點間隔(本文設置為0.6 m)。
(3)將緩沖區中的各點水平投影到基準面上,按照從起點到終點的順序進行排序,并按照0.3 m的間隔進行重采樣,得到一個間隔均勻的離散曲線,作為汽車點云形狀(見圖2)。
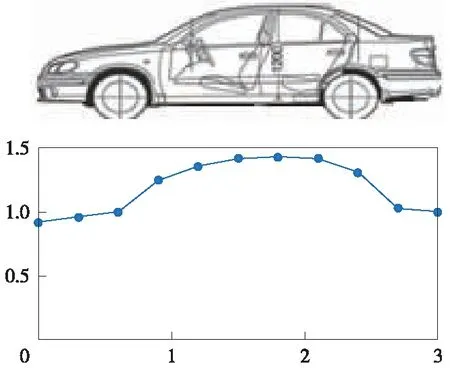
圖2 汽車形狀曲線
2.2 汽車形狀相似度指標計算
在該方法中,相似度指標的選擇是汽車類型識別方法的核心,是影響汽車類型判別的關鍵。考慮到汽車形狀為二維曲線,在模式識別、人工智能領域內對二維曲線的相似性有很多相關研究。以下選擇Hausdorff距離、離散Fréchet距離、DTW規整距離三種相似度評價指標。Hausdorff距離廣泛應用于圖像配準、目標識別與檢測[9];離散Fréchet距離可用于生物特征識別[10]、地圖匹配[13];DTW規整距離則主要應用于語音識別[12]。
(1)Hausdorff距離
Hausdorff距離作為衡量點集之間相似度的一種指標,不考慮點之間的連接關系,僅考慮點的位置。對于任意兩個有限點集P={p1,p2,,pm},Q={q1,q2,,qn},兩者之間的Hausdorff距離可定義[14]為
DH(P,Q)=max(dh(P,Q),dh(Q,P))
(1)

DH(P,Q)可用于判斷P,Q的相似性,其值越小,則P,Q形狀越相似;反之亦然。
(2)離散Fréchet距離
離散Fréchet距離是衡量曲線相似度的一種指標,在考慮點位置的基礎上,還考慮了點的排列,其定義[15]如下:
P和Q分別為m和n個點組成的多邊形鏈,令σ(P)=(p1,p2,,pm)
σ(Q)=(q1,q2,,qn),則有
L={(pa1,qb1),(pa2,qb2),,(pak,qbk)}
(2)

(3)
則P和Q的離散Fréchet距離定義為
(4)
DF(P,Q)可用于判斷P,Q的相似性,其值越小,則P,Q形狀越相似;反之亦然。
(3)DTW規整距離
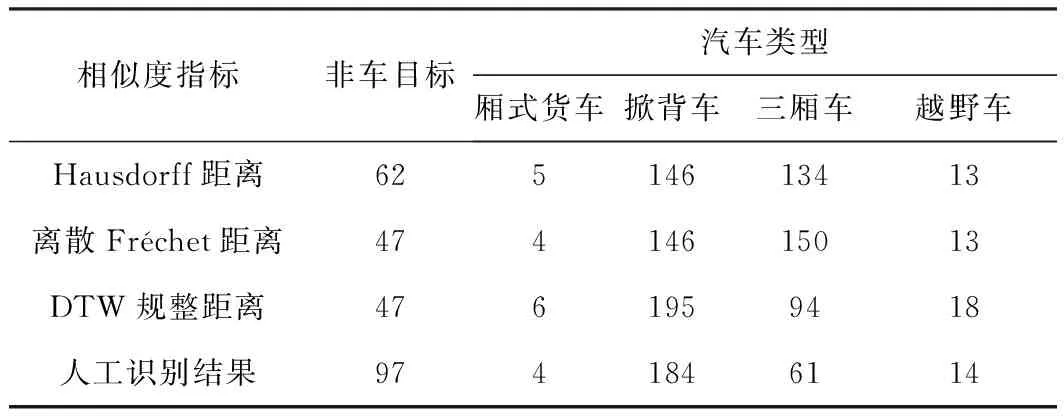
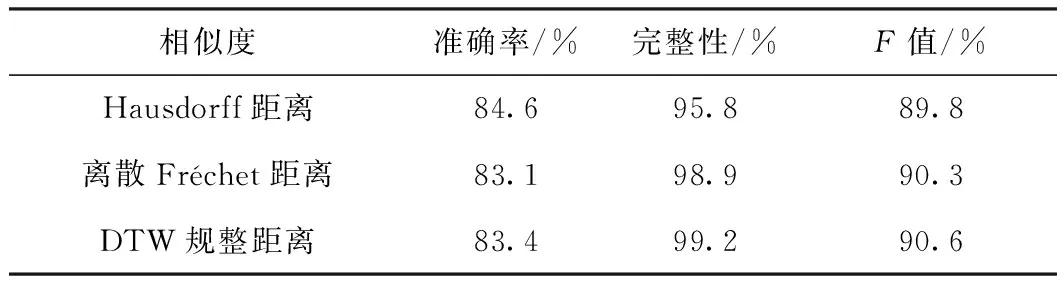
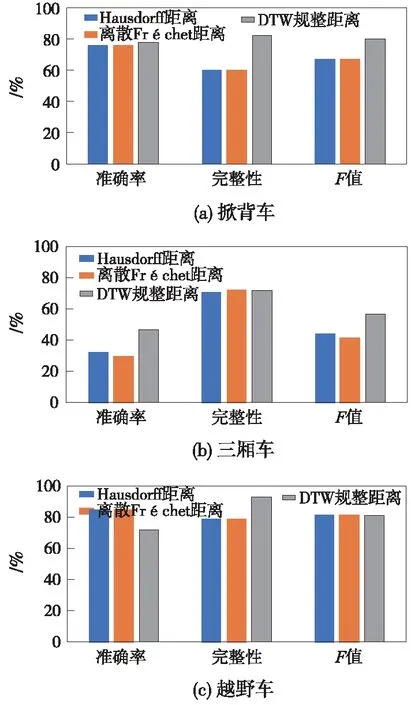
DTW算法基于動態規劃的思想,可計算兩個相關不同長度模板之間的相似性。假設有參考模板和測試模板分別為P={p1,p2,,pm}與Q={q1,q2,,qn},其中模板的分量pi(0 (5) DDTW(i,j)可用于判斷P,Q的相似性,其值越小,則P,Q形狀越相似;反之亦然。 實驗數據采用2010年采集于荷蘭Utrecht市某商業中心的機載LiDAR點云數據,點密度為20~30 pts/m2,區域范圍約200 m×120 m(見圖3)。汽車停放于停車場內和建筑周圍,部分位于路邊,共計263臺汽車。 圖3 實驗數據 在建立標準汽車形狀集時,包括了從車頭到車尾和從車尾到車頭兩條形狀曲線(見圖4)。 圖4 標準縱剖面曲線 對點云進行布料模擬濾波(CSF),對分離出來的非地面點進行分塊和初步篩選,得到360個候選點云分塊(見圖5)。對每個分塊按照1.1節中的方法構建形狀曲線,然后分別利用Hausdorff距離、離散Fréchet距離和DTW規整距離三個指標計算其與標準汽車形狀的相似度指標。其相似度閾值分別為0.95,0.95和6.5。 采用人工交互方式確定的汽車類型作為評價依據。這360個候選點云分塊共有97個為非車地物目標,263個為汽車。其中廂式貨車4臺,掀背車184臺,三廂車61臺,越野車14臺(見圖5)。 圖5 候選點云分塊和人工識別結果 采用Hausdorff距離、離散Fréchet距離和DTW規整距離三個不同的相似度評價指標,按照1.2節中的方法來進行汽車類型識別,結果如圖6。 圖6 采用不同相似度指標的汽車類型識別結果 三種相似度評價指標的汽車類型識別結果及人工識別結果如表1。 山谷到黔州,現重慶彭水苗族土家族自治縣,更為偏遠荒涼,心情抑郁憤懣,苦悶與悲哀無處不在。如:《答王補之書》:“今者不肖得罪簡牘,棄絕明時,萬死投荒,一身吊影,不復齒于士大夫矣。”(轉引自伍聯群《黃庭堅蜀中交游及其對巴蜀地域文化的推動》,《文藝評論》,2011年第4期)《與太虛公書》:“摒棄不毛之鄉,以御魑魅,耳目昏塞,舊學廢忘,直是黔中一老農耳。”(《黃庭堅全集》,四川大學出版社,第1377頁) 表1 汽車類型識別結果 采用準確率、完整性和F值等三個指標[17-19]來對實驗結果進行分析。 準確率(Precision) (6) 完整性(Recall) (7) F值(Fscore),是前述二者的調和均值,本文將該指標用作汽車識別性能的總體評價指標。 (8) 其中,在非車目標識別中,tp表示結果判定為汽車且實際為汽車的數量,fp表示結果判定為汽車但實際為非車的數量,fn表示結果判定為非車但實際為汽車的數量;在具體汽車類型識別中,tp表示結果判定為某類汽車且實際為該類汽車的數量,fp表示結果判定為某類汽車但實際為其它類型汽車或者非車的數量,fn表示結果判定為其它類型汽車或者非車但實際為某類汽車的數量。 (1)非車目標識別結果分析 候選點云分塊中非車目標的準確判斷是汽車類型識別工作中的重要內容,三種相似度評價指標對非車目標的識別結果見表2。 表2 非車目標識別精度比較 三種相似度指標判別結果的準確率基本相當,Hausdorff距離準確率稍優,DTW規整距離和離散Fréchet距離的完整性均大于98%,基本能將所有非車目標判斷出來,Hausdorff距離的完整性稍低于其他二個相似度評價指標。 從算法性能的總體評價指標(F值)來看,三種相似度評價指標中DTW規整距離對非車目標的識別效果稍好。 (2)具體汽車類型識別的準確性分析 四種類型汽車中,廂式貨車僅有4輛,數據量不足,以下不對廂式貨車進行具體汽車類型識別的準確性分析。就其它三種車型而言,不同的相似度評價方法對具體汽車類型的識別結果如圖7。 圖7 不同相似度指標下的不同汽車類型識別 從準確率看:對掀背車三種相似度指標基本相當;就三廂車而言,DTW規整距離的準確率最高;就越野車而言,Hausdorff距離與離散Fréchet距離結果一致,DTW規整距離較高。 從完整性看:對于掀背車,DTW規整距離的結果完整性為82.1%,明顯高于其它兩種相似度指標;就三廂車而言,三種相似度指標完整性一致,其中Hausdorff距離稍差;就越野車而言,DTW規整距離的完整性高出其它兩者14.3%。 從算法性能的總體評價指標(F值)看:對掀背車,DTW規整距離的F值高出其它兩種指標12.4%,就三廂車而言,DTW規整距離的F值高出Hausdorff距離12.7%,高出離散Fréchet距離15.1%,本試驗區越野車數量較少,三種相似度評價指標得到的F值結果基本相當。總體而言,DTW規整距離的總體評價指標最優,F值平均為72.9%。 對于具體汽車類型識別而言,采用DTW規整距離作為相似度指標,算法效果最優。汽車形狀可看作一個時間序列,其中汽車長度等效于時間,汽車高度可視為時信號。DTW規整距離只受高度和形狀影響,不受長度影響。因此,對同類汽車可能存在長度不一的情況適應性最好,識別效果最優。 基于汽車形狀曲線的機載點云汽車類型判別方法能夠有效判定候選點云分塊中的非車目標以及汽車的具體類型。從總體評價指標(F值)來看,DTW規整距離作為相似度指標效果最好。 對于非車目標的識別,采用DTW規整距離作為相似度算法的總體性能指標最優。對于掀背車,越野車和三廂車等三種具體車型識別總體性能指標,DTW規整距離均優于Hausdorff距離、離散Fréchet距離這兩個指標。3 試驗
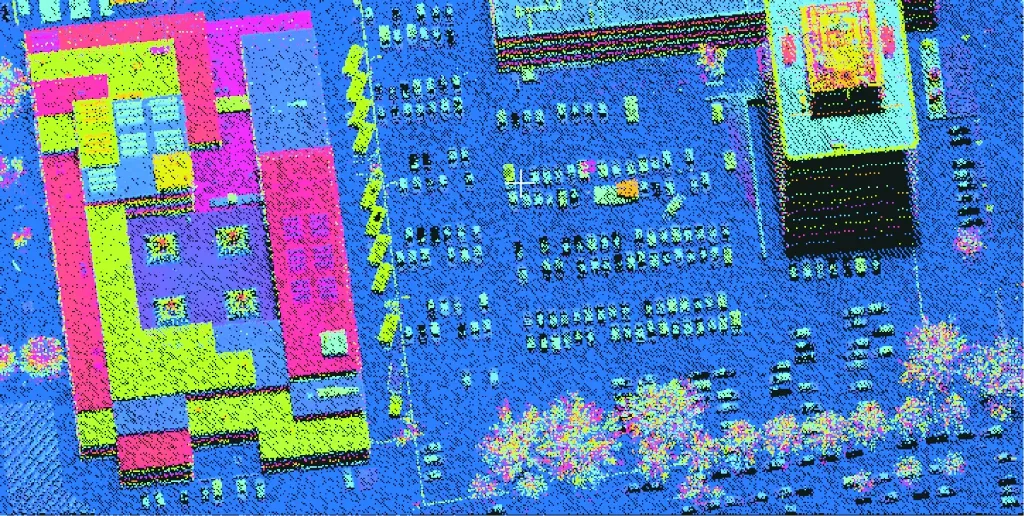
3.1 實驗數據


3.2 汽車類型識別結果
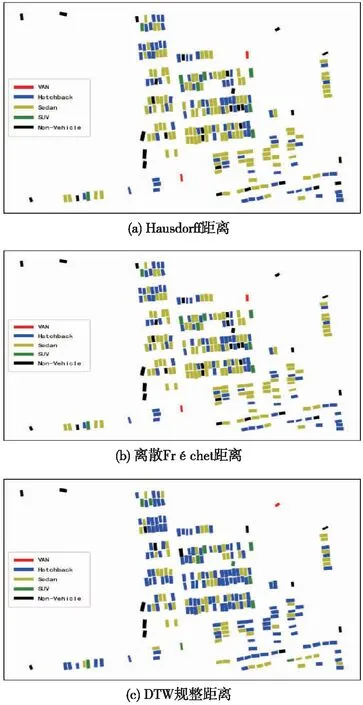
3.3 汽車類型識別結果分析
4 結論
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
決策探索(2014年21期)2014-11-25 12:29:50
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
體育師友(2012年4期)2012-03-20 15:30:10