談上軟下硬地層盾構糾偏技術
2018-10-24 09:16:34文一鳴祁海峰
山西建筑 2018年27期
關鍵詞:測量
文一鳴 祁海峰
(中國水利水電第十四工程局有限公司,云南 昆明 650041)
0 引言
隨著國內地鐵建設步伐的加快,盾構法作為一種修建地鐵區間隧道安全、快速、對周邊影響小、較高適應性的施工方法,被廣泛采用。在實際盾構施工掘進中,地質情況復雜多變,軟硬地層交替出現,且同一橫斷面上下軟硬不均、富水情況變化較大的情況時有發生,因此研究針對盾構穿越復合地層的盾構姿態控制技術十分必要。
1 依托工程概況
成都地鐵蜀十區間為盾構施工區間,區間隧道拱頂最大覆土埋深16 m,最小埋深9 m,最大曲線半徑650 m,最小曲線半徑600 m,最大坡度26.2‰,左線盾構機處于直線上,隧道埋深12 m。從269環~413環掘進期間,先后有三階段出現盾構機垂直姿態上浮,需進行姿態糾偏及控制。
2 設備情況
1)盾構機鉸接為被動鉸接,鉸接最大伸長量為150 mm。現盾構機上部鉸接已經伸長到最大,下部鉸接伸長為50 mm左右。為防止上部鉸接回收,在11點、1點位處已經用鋼板固定中盾和尾盾,使上部鉸接固定。目前鉸接力在180 bar~220 bar左右。
2)盾尾間距,見表1。
3 糾偏過程
3.1 第一次糾偏措施
蜀十區間左線掘進至269環時,盾構機垂直姿態持續往上,從270環~345環掘進采取糾偏掘進。
采取的措施:停止掘進,要求海瑞克廠家人員對超挖刀進行調試,采取超挖刀伸長35 mm進行糾偏掘進,掘進時合理的進行管片選型,增加上部推進油缸壓力,停止下部油缸等。
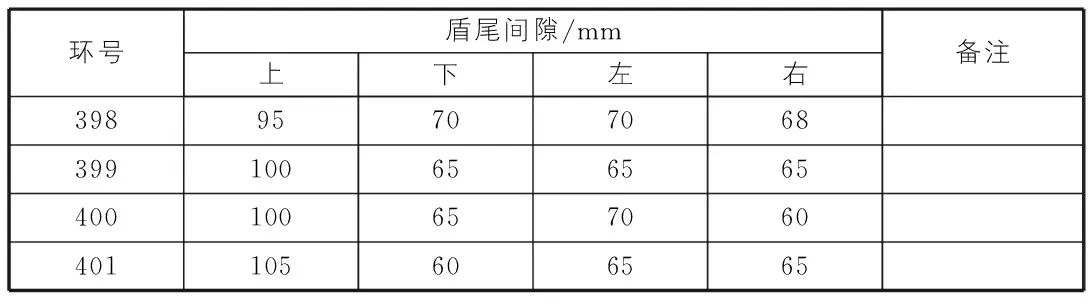
表1 盾構間隙統計表
糾偏效果:通過270環~280環的掘進,盾構機垂直姿態糾偏顯著。281環~345環掘進時,一直采取超挖刀伸長35 mm進行掘進,掘進期間盾構機姿態能有效得到控制。
3.2 第二次糾偏措施
346環~351環掘進時盾構機垂直姿態又一次往上漂,352環~406環掘進為第二次盾構機垂直姿態糾偏。
采取的措施:351環掘進完后停機,海瑞克廠家人員再次對超挖刀進行調試,使超挖刀伸長60 mm,從352環掘進開始采取超挖刀伸長60 mm進行掘進。掘進中適當增加土倉壓力,增加注漿量,增加上部油缸推力停止下部油缸,固定上部鉸接油缸等方式進行姿態糾偏。
糾偏效果:通過352環~386環的掘進,盾構機垂直姿態能得到控制,糾偏效果明顯。后續387環~406環掘進時盾構機垂直姿態又一次有上飄趨勢,主要是超挖刀被磨損后,造成糾偏效果不明顯。
3.3 第三次糾偏措施
407環~413環掘進為第三次糾偏掘進。
采取措施:對36號、37號、38號、39號4把18寸邊緣滾刀更換為加長撕裂刀,繼續采取超挖的形式進行姿態糾偏。
糾偏效果:通過407環~410環的掘進,盾構機垂直姿態逐步往下,糾偏效果明顯。411環~413環姿態往上主要是因為加長撕裂刀發生扭動失去超挖效果。
4 后續掘進措施
4.1 持續使用超挖刀
1)繼續使用超挖刀增大刀盤開挖直徑,使盾構機姿態整體往下,最終有效控制盾構機姿態。
2)同時對36號、37號、38號、39號4把18寸邊緣滾刀更換為加長撕裂刀,使撕裂刀同步配合超挖刀可達到整圈超挖60 mm的超挖效果,通過增加開挖半徑進行姿態糾偏。
4.2 合理進行管片選型
1)根據盾尾間隙進行管片選型。
掘進時刻關注盾尾間隙,當掘進到1/2時,測量盾尾間隙,操作手根據盾尾間隙情況進行掘進方向的微調,確保足夠的盾尾間隙。每一環掘進完成后再次測量盾尾間隙,根據實際測量的盾尾間隙、推進油缸行程和鉸接油缸行程選取是否用轉彎環,并確定拼裝點位,以便于盾構機姿態糾偏。管片最大楔形量位置約可以使對應部位盾尾間隙調整6 mm。
2)根據油缸行程進行管片選型。
推進油缸千斤頂行程差達到80 mm時,必須選擇轉彎環進行行程差調節,減少管片環面與千斤頂接觸面的折角,以更有利于下一環盾構推進及姿態的調整。
3)使用1.2 m管片。
使用1.2 m的轉彎環管片,使管片更貼合設計線路,調整盾尾間隙。
4.3 調整推進油缸壓力分布
后續掘進時仍然保持上部推進油缸壓力最大,適當減小或停止兩側油缸壓力,停止下部油缸,增加盾構機向下的趨勢,慢慢使垂直姿態往下。
4.4 調整鉸接油缸
掘進時適當活動鉸接油缸,使盾尾適應管片姿態,確保有足夠的盾尾間隙,減小管片對盾尾的拉力。逐步使盾尾與前筒體成直筒型。
4.5 控制掘進速度
1)控制掘進速度,降低盾構機掘進速度,掘進速度控制在15 mm/min以內;
2)根據掘進速度適當調整土倉壓力,增大反力,有利于姿態調整;
3)姿態糾偏掘進期間,每班掘進不超過3環。
4.6 調整同步注漿量
適當增加同步注漿量,主要增加上部同步注漿量,讓管片上部填充密實,減小管片的上浮量。在使用超挖刀掘進糾偏期間,由于開挖直徑增大,必須增加相應的同步注漿量。同時由于開挖直徑的增大,防止止漿板失去作用,為防止漿液通過止漿板匯集到盾尾處,造成漿液凝固后包裹盾尾的情況,減小同步注漿水泥用量,采取惰性漿液,見表2。
4.7 二次注漿
糾偏掘進期間,當管片脫出盾尾3環時,利用二次注漿設備對該環進行二次注漿。同時每隔5環做一加固環,對加固環管片四周進行二次注漿,穩固管片。二次注漿漿液均采用雙液漿。

表2 使用超挖刀時注漿量對照表
4.8 姿態測量
1)每掘進3環進行一次管片姿態測量,根據管片姿態及時進行二次注漿,防止管片姿態超限。
2)每掘進5環進行一次盾構姿態測量,確定當前盾構機姿態準確。
4.9 管片螺栓復緊及拉結
管片拼裝完后,立即對管片螺栓進行擰緊,并對相鄰兩環管片螺栓進行擰緊,推進時再次進行擰緊,減少管片受力產生位移。同時,由于姿態糾偏,掘進時推進油缸大部分力都在上部,造成下部管片受力較小,形成管片受力不均的情況,易造成管片出現錯臺。掘進時用型鋼把后面5環管片拉緊,形成一個整體,提高隧道的縱向剛度,防止管片錯臺。
5 后續糾偏姿態控制
5.1 盾構姿態控制
根據對十陵站左線接收洞門以及接收托架的測量,左線洞門水平左偏11 mm,高程比設計低13 mm,接收托架高程比設計高16 mm。為確保盾構機順利出洞,出洞姿態控制為垂直前點20 mm~30 mm,水平姿態控制-15 mm~0 mm。現盾構機還有36環出洞,為防止后續掘進時盾構機姿態持續往上,造成出洞困難的情況,后續掘進時控制盾構機前點垂直姿態不超過20 mm。
5.2 管片姿態控制
根據現在所測量管片姿態,該段管片垂直姿態最大偏差為87 mm,符合隧道驗收要求。同時,當管片脫出盾尾后,及時進行管片頂部二次注漿,通過注漿使管片再次往下10 mm左右,最終確保管片姿態控制在100 mm以內。
5.3 糾偏掘進質量控制
5.3.1管片錯臺控制
1)管片拼裝前,根據盾尾間隙油缸行程確定管片型號以及拼裝點位。
2)盾構機推進完成后,千斤頂縮回后應對盾尾進行清理,在保證盾尾無雜物的情況下才能拼裝管片。
3)管片拼裝應遵循由下至上、左右交叉、最后封頂的順序,操作手如果違規操作規程,順時針拼裝或者逆時針拼裝的后果將導致整環管片沿拼裝方向發生一定角度的旋轉,持續的單方向拼裝將使環向旋轉累積,最終導致整環管片的扭轉角度很大并導致錯臺。應盡量調校管片位置與上環管片平順,螺栓孔位置對正,螺栓穿插容易。
4)管片拼裝完后,立即對管片螺栓進行擰緊,并對相鄰兩環管片螺栓進行擰緊,推進時再次進行擰緊,減少管片受力產生位移。
5)由于姿態糾偏,掘進時推進油缸大部分力都在上部,造成下部管片受力較小,形成管片受力不均的情況,易造成管片出現錯臺。掘進時用型鋼把后面5環管片拉緊,形成一個整體,提高隧道的縱向剛度,防止管片錯臺。
6)提高漿液質量,增加同步注漿量,填筑管片與地層間隙。
5.3.2管片破損控制
1)檢查管片螺栓是否完整,清除螺栓孔中的雜物。2)管片拼裝前,人工量取盾尾間隙,根據盾尾間隙選擇合適的管片拼裝點位,防止拼裝點位不對使得盾尾間隙局部很小,推進過程中管片卡住盾殼破壞管片。3)對出現破損的管片及時按照修補方案進行修補。
5.3.3領導值班制度
盾構到達十陵站期間,盾構掘進施工時全程24 h進行領導值班,確保掘進出現異常情況時及時進行處理。
6 結語
穿越上軟下硬(全風化泥巖、強風化泥巖、中等風化泥巖以及局部穿越黏土夾卵石)地層中采取以下控制技術:1)合理使用超挖刀。2)合理進行管片選型(根據盾尾間隙、油缸行程以及將1.2 m管片代替1.5 m管片)。3)調整推進油缸壓力分布。4)調整鉸接油缸。5)控制掘進參數。6)調整同步注漿及二次注漿參數,控制管片上浮。7)加強管片姿態測量頻率。8)管片螺栓復緊及拉結。通過以上控制技術,達到管片姿態控制在±100 mm以內。此糾偏技術安全、可靠、實用性強,有極大的借鑒價值。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00