某純電動(dòng)車驅(qū)動(dòng)電機(jī)選型及仿真分析
2018-11-01 01:17:06張桂連龍?jiān)姉?/span>
汽車電器 2018年10期
陳 宏,張桂連,楊 凡,黃 偉,龍?jiān)姉?/p>
(湖南獵豹汽車股份有限公司,湖南 長沙 410100)
純電動(dòng)汽車采用電機(jī)作為其驅(qū)動(dòng)裝置,并應(yīng)用化學(xué)蓄電池組、燃料電池組、超級電容器組和/或飛輪組為其相應(yīng)的能源[1]。電機(jī)作為主要的驅(qū)動(dòng)裝置,其合理選型和匹配分析對整車動(dòng)力性、百公里電耗和續(xù)航里程等有重要的影響。目前,相關(guān)學(xué)者針對電機(jī)選型主要關(guān)注電機(jī)峰值特性參數(shù)和額定特性參數(shù),如何洪文等[2]、趙強(qiáng)等[3-7]對電機(jī)選型主要關(guān)注電機(jī)峰值功率、峰值扭矩、最高轉(zhuǎn)速、額定功率、額定扭矩、額定轉(zhuǎn)速等參數(shù)。上述研究缺少電機(jī)效率map以及NEDC工況下電機(jī)效率工作點(diǎn)對百公里電耗和續(xù)航里程的綜合考慮。本文以某純電動(dòng)汽車為研究對象,在動(dòng)力電池、主減速器等部件確定的情況下,依據(jù)整車設(shè)計(jì)目標(biāo),利用AVL_cruise軟件搭建了整車仿真模型,分析了3種不同電機(jī)外特性曲線、效率map對整車動(dòng)力性、百公里電耗及續(xù)航里程的影響,為純電動(dòng)汽車電機(jī)選型及性能優(yōu)化提供了依據(jù)和支撐。
1 電機(jī)選型與匹配
電機(jī)是電動(dòng)汽車行駛的動(dòng)力源,電機(jī)選型除了關(guān)注峰值功率、峰值轉(zhuǎn)矩、最高轉(zhuǎn)速、額定功率、額定轉(zhuǎn)矩、額定轉(zhuǎn)速外,還需關(guān)注電機(jī)及控制器的效率map。
1.1 整車參數(shù)
本文研究的純電動(dòng)汽車構(gòu)型為前置前驅(qū),電機(jī)+單級主減速器的驅(qū)動(dòng)方案,其整車目標(biāo)參數(shù)見表1。
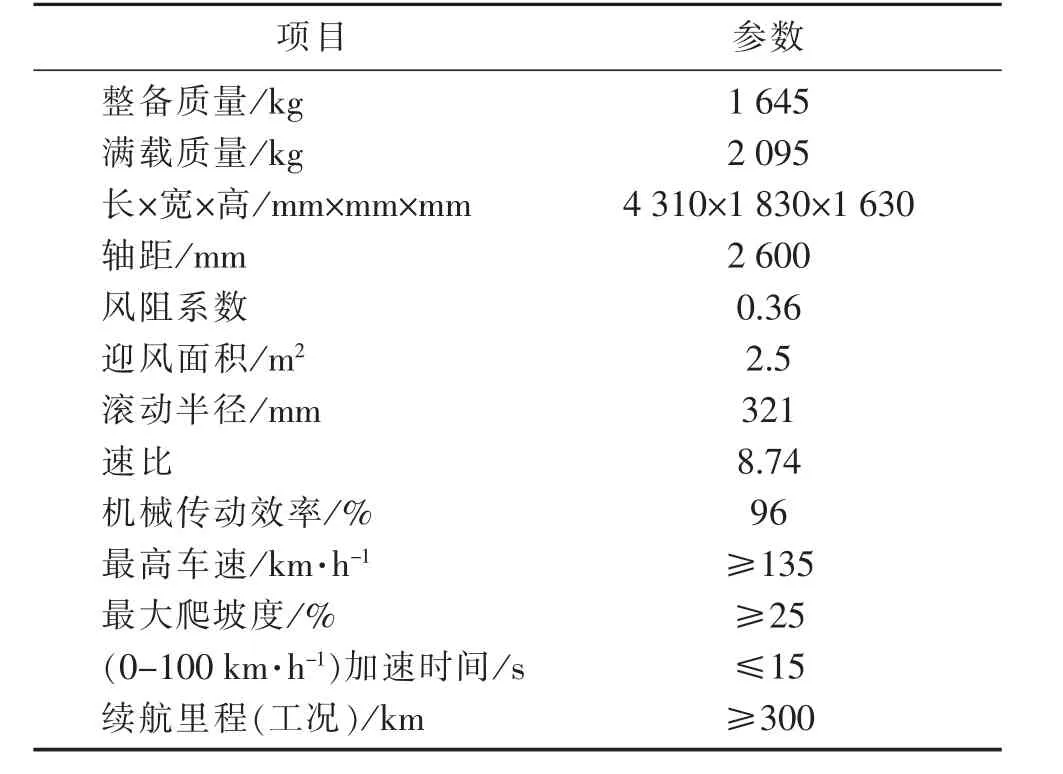
表1 純電動(dòng)汽車整車目標(biāo)參數(shù)
1.2 電機(jī)參數(shù)確定
1.2.1 電機(jī)額定功率和峰值功率
電機(jī)作為電動(dòng)汽車行駛的動(dòng)力源,其功率需滿足最高車速、最大爬坡度和加速性能,同時(shí)還需考慮續(xù)航里程和能耗要求。
根據(jù)標(biāo)準(zhǔn)GB/T18385—2005《電動(dòng)汽車 動(dòng)力性能試驗(yàn)方法》中規(guī)定及汽車行駛受力分析,其功率平衡方程式為[8]:
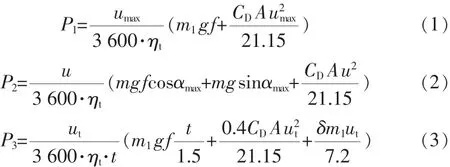
式中:m——汽車滿載質(zhì)量,kg;m1——汽車動(dòng)力性試驗(yàn)質(zhì)量,kg;f——滾動(dòng)阻力系數(shù);CD——風(fēng)阻系數(shù);A——迎風(fēng)面積,m2;umax——最高車速,km·h-1;ηt——機(jī)械系統(tǒng)傳動(dòng)效率,%;αmax——最大爬坡度,(°);u——最大爬坡度對應(yīng)的車速,km·h-1;t——加速時(shí)間,s;ut——終點(diǎn)加速車速,km·h-1;δ——汽車旋轉(zhuǎn)質(zhì)量換算系數(shù);P1——最高車速對應(yīng)的功率,kW;P2——最大爬坡度對應(yīng)的功率,kW;P3——加速時(shí)間對應(yīng)的功率,kW。
根據(jù)式 (1)計(jì)算出最高車速對應(yīng)的電機(jī)功率P1;式(2)計(jì)算出最大爬坡度對應(yīng)的電機(jī)功率P2;式 (3)計(jì)算出0-100 km·h-1加速時(shí)間對應(yīng)的電機(jī)功率P3。而電機(jī)峰值功率應(yīng)該取三者中的最大值,即滿足式 (4):

電機(jī)額定功率通常滿足最高車速對應(yīng)的電機(jī)功率P1即可。
根據(jù)上式可計(jì)算出電機(jī)峰值功率≥90 kW,額定功率≥45 kW。
1.2.2 電機(jī)最高轉(zhuǎn)速和額定轉(zhuǎn)速
電機(jī)最高轉(zhuǎn)速需滿足汽車最高車速的要求,即:

式中:i0——主減速比;r——車輪半徑,mm。
電機(jī)額定轉(zhuǎn)速通常根據(jù)汽車常行駛車速來定,即常規(guī)車速定為45 km·h-1。
根據(jù)上式可計(jì)算出電機(jī)峰值轉(zhuǎn)速≥9 500 r·min-1,額定轉(zhuǎn)速≥3 500 r·min-1。
氣焰赫赫的風(fēng)云八虎,不到一年,三虎死于非命,均被烈焰焚燒而死,死狀極慘。一般人提及此事,皆心有余悸;茍活于世的三虎,以及他們的后臺(tái)德公公,此后寢無眠,食無味,惶惶不可終日。
1.2.3 電機(jī)峰值扭矩和額定扭矩電機(jī)峰值扭矩需滿足汽車最大爬坡度的要求,即:

式中:ui——爬坡對應(yīng)的車速,km·h-1。
電機(jī)額定扭矩根據(jù)額定功率和額定轉(zhuǎn)速來計(jì)算。
根據(jù)上式可計(jì)算出電機(jī)峰值扭矩≥240 Nm,額定扭矩≥123 Nm。
1.2.4 電機(jī)及控制器效率

式中:Pout_m——電機(jī)輸出功率,kW;Pin_m_c——電機(jī)控制器輸入功率,kW。
目前有3款電機(jī)符合上述要求,其性能參數(shù)對比見表2。
額定電壓320 V時(shí)電機(jī)外特性曲線、峰值功率曲線如圖1、圖2所示。
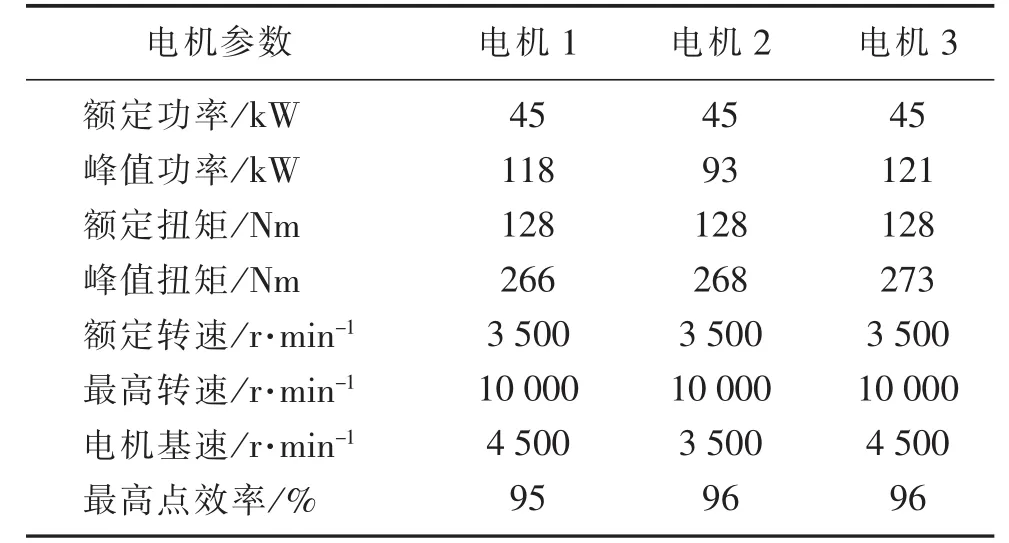
表2 3款電機(jī)參數(shù)

圖1 3款電機(jī)外特性曲線
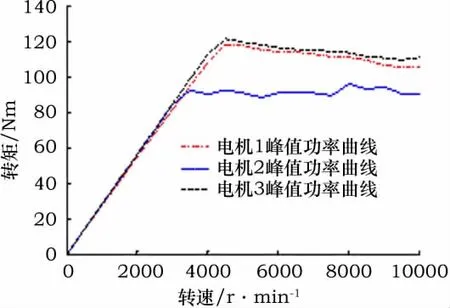
圖2 3款電機(jī)峰值功率曲線
2 電機(jī)性能對比仿真分析
從電機(jī)參數(shù)方面看,此3款電機(jī)均能滿足要求,但這還不足以判定哪款電機(jī)更適合本款純電動(dòng)汽車。客戶除了關(guān)注整車動(dòng)力性外,更關(guān)注百公里電耗和續(xù)航里程。因此為了進(jìn)一步分析哪款電機(jī)與整車匹配更好,通過cruise建立整車仿真模型,分析電機(jī)特性參數(shù)對整車動(dòng)力性、百公里電耗及續(xù)航里程的影響[9]。cruise模型中電池的類型為三元鋰電,其參數(shù)按照容量150 Ah、額定電壓320 V、電量48.2 kWh設(shè)定。仿真建模見圖3。
2.1 峰值參數(shù)對整車動(dòng)力性影響

圖3 cruise仿真模型
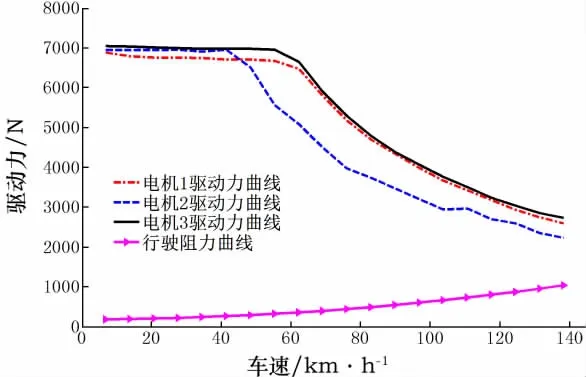
圖4 最高車速
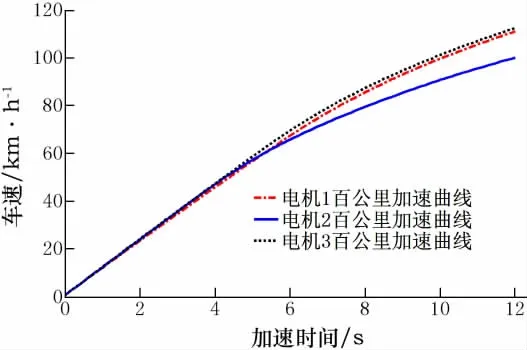
圖5 (0-100 km·h-1)加速時(shí)間
2.1.1 最高車速
從圖4可知,驅(qū)動(dòng)力與行駛阻力沒有交點(diǎn),整車最高車速取決于電機(jī)峰值轉(zhuǎn)速。假定此時(shí)電池瞬時(shí)放電功率能滿足整車的要求,則電機(jī)峰值轉(zhuǎn)速越高,整車最高車速越大。3個(gè)電機(jī)的峰值轉(zhuǎn)速相同,則整車能達(dá)到的最高車速一樣,并且均能滿足最高車速設(shè)計(jì)要求。
2.1.2 加速時(shí)間
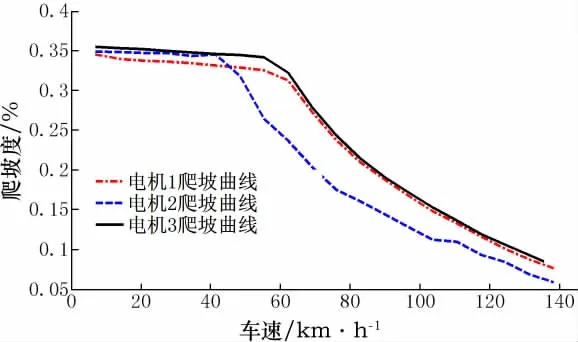
圖6 最大爬坡度
從電機(jī)峰值功率曲線可知,電機(jī)轉(zhuǎn)速低于3 440 r·min-1(對應(yīng)的車速為50 km·h-1)時(shí),3個(gè)電機(jī)功率接近,相差較小,因此0-50 km·h-1加速時(shí)間接近,仿真計(jì)算的結(jié)果為電機(jī)3和電機(jī)2加速時(shí)間為4.3 s,電機(jī)1加速時(shí)間為4.4 s。而車速由50 km·h-1到100 km·h-1,電機(jī)2的功率在基速為3 500 r·min-1功率達(dá)到峰值且進(jìn)入恒功率運(yùn)行區(qū),而電機(jī)1和電機(jī)3在基速4 000 r·min-1時(shí)功率達(dá)到峰值且進(jìn)入恒功率運(yùn)行區(qū)。因此車速在50-100 km·h-1加速時(shí)間,電機(jī)3超車加速時(shí)間為5.6 s,電機(jī)1超車加速時(shí)間為5.7 s,而電機(jī)2超車加速時(shí)間為7.9 s。如圖5所示。由于采用單擋變速傳動(dòng),則整車的超車加速時(shí)間與電機(jī)峰值功率有較大關(guān)系,電機(jī)峰值功率越大,整車后備儲(chǔ)備功率越足,整車的超車加速性能更好。2.1.3 最大爬坡度
整車最大爬坡度與峰值扭矩有關(guān),電機(jī)3峰值扭矩大于電機(jī)2,電機(jī)1峰值扭矩最小,因此3款電機(jī)最大爬坡度從大到小對應(yīng)的電機(jī)依次為電機(jī)3、電機(jī)2和電機(jī)1,其最大爬坡度依次為35.5%、34.9%、34.5%。如圖6所示。
2.2 電機(jī)及控制器效率對百公里電耗及續(xù)航里程影響
純電動(dòng)汽車由動(dòng)力電池提供電能,經(jīng)電機(jī)控制器由直流轉(zhuǎn)換為交流,電機(jī)再把電能轉(zhuǎn)換為機(jī)械能,驅(qū)動(dòng)汽車行駛。在此過程中,電機(jī)及控制器效率越高,其本身消耗的能量越小,給汽車供能更多,則行駛里程更遠(yuǎn)。根據(jù)標(biāo)準(zhǔn)GB/T18386—2018《電動(dòng)汽車 能量消耗率和續(xù)航里程試驗(yàn)方法》中的要求,中國評價(jià)百公里電耗和續(xù)航里程的工況為NEDC工況,其包含4個(gè)市區(qū)工況和1個(gè)市郊工況,能夠客觀反映整車能耗及續(xù)航里程。為此在cruise模型中設(shè)置計(jì)算任務(wù)進(jìn)行百公里電耗和續(xù)航里程仿真,仿真結(jié)果見表3,各電機(jī)在NEDC工況下運(yùn)行工作點(diǎn)見圖7。
表3 續(xù)航里程及能耗
從圖7中可以看出,電機(jī)2及控制器的高效率區(qū)較寬,覆蓋面積大,且轉(zhuǎn)速范圍約為3 500~6 200 r·min-1,而電機(jī)1及控制器和電機(jī)3及控制器的最高效率區(qū)相對較窄,且轉(zhuǎn)速范圍約為5 000~7 000 r·min-1。由于NEDC工況含4個(gè)市內(nèi)工況和1個(gè)市郊工況,因此,低轉(zhuǎn)速效率高則有利于整車能耗的降低,同時(shí)提高續(xù)駛里程。
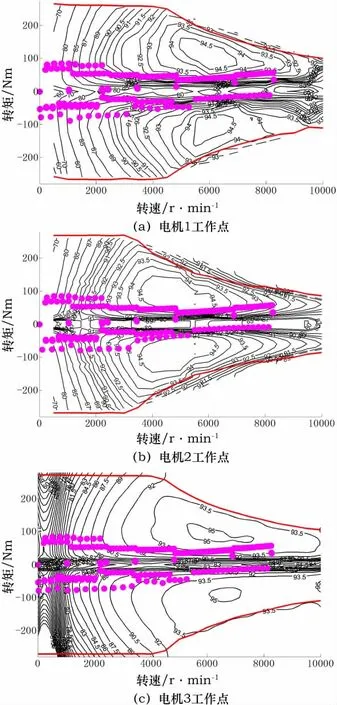
圖7 各電機(jī)工作點(diǎn)
根據(jù)以上動(dòng)力性、續(xù)航里程和能耗分析,選取電機(jī)2更適合本款車型。
3 試驗(yàn)對比
為了驗(yàn)證電機(jī)選型合理性及仿真模型的可行性,對純電動(dòng)車進(jìn)行了動(dòng)力性、經(jīng)濟(jì)性試驗(yàn)。仿真與試驗(yàn)對比結(jié)果如表4所示。由表4可知,誤差值控制在5%以內(nèi)。該結(jié)果表明,仿真指標(biāo)與實(shí)車試驗(yàn)結(jié)果比較吻合,誤差在可接受范圍內(nèi)。
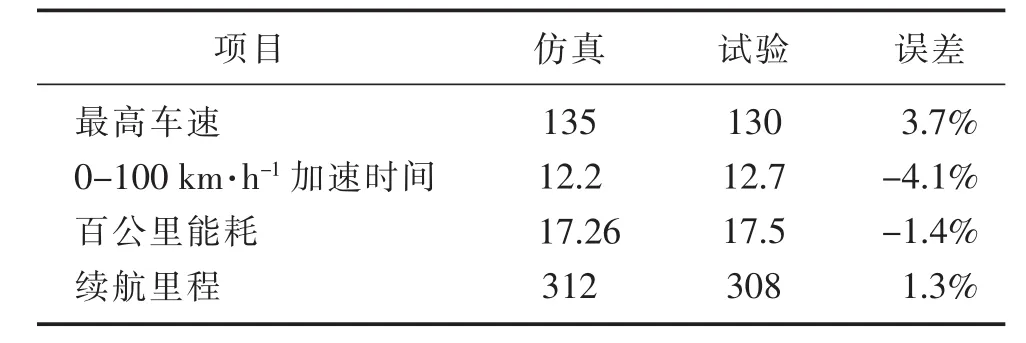
表4 動(dòng)力性、經(jīng)濟(jì)性仿真與試驗(yàn)結(jié)果對比
4 結(jié)束語
本文以某純電動(dòng)汽車為研究對象,在動(dòng)力電池、主減速器等部件確定的情況下,利用AVL_cruise軟件搭建了整車仿真模型,分析了3款電機(jī)特性對整車動(dòng)力性、百公里電耗經(jīng)濟(jì)性和續(xù)航里程影響,從中選取合理的電機(jī)。
本文結(jié)果對電機(jī)選型起指導(dǎo)作用,電機(jī)選型除需關(guān)注電機(jī)峰值功率、峰值扭矩外,還需關(guān)注NEDC工況下電機(jī)工作點(diǎn)的效率,當(dāng)電機(jī)工作效率越高,整車?yán)m(xù)航里程和能耗更好,除此之外,也需關(guān)注電機(jī)EMC、NVH性能。