自動駕駛控制系統芯片技術現狀與應用分析
2018-11-01 01:17:08孫芳岑
汽車電器 2018年10期
劉 偉,孫芳岑
(1.東軟睿馳汽車技術 (沈陽)有限公司,遼寧 沈陽 110179;2.大陸汽車電子 (長春)股份有限公司,吉林 長春 130025)
近年來自動駕駛技術得到了突飛猛進的發展,從國內外各類技術比賽[1]中對自動駕駛算法的系統研究,到新興技術公司在自動駕駛市場應用領域的大力投入,技術的積累和市場的推動,為自動駕駛系統應用提供了廣闊的前景[2]。
自動駕駛是集環境感知與認知技術、系統決策技術、車輛底盤與車身控制技術于一體的綜合性系統。近年來自動駕駛的發展,也得益于傳感器技術、車輛電子電器架構以及車載計算芯片的飛速發展。
1 自動駕駛系統功能架構
圖1描述了車輛網聯信息來源和感知范圍,以及應用感知信息實現車輛智能化相關功能的流程,如車道保持、全速自適應巡航、主動換道、交通擁堵輔助、車道級導航[4-8]等,本文中具體的智能化功能即為自動駕駛。
自動駕駛系統是通過傳感器感知并認知環境、車輛運動及工作狀態、駕駛員操縱與操作狀態,結合對環境、車輛運動學模型、自動駕駛任務的理解,實現對車輛運動行為的決策,通過車輛底層控制系統完成對車輛動作的控制。文獻[3]將上述過程中的決策任務分為3個層次,即策略層、戰術層和控制層,分別對應駕駛任務理解與全局性路徑規劃、局部環境認知與局部路徑規劃、車輛執行機構控制。

圖1 智能網聯車輛系統構成與自動駕駛功能析出
自動駕駛是以環境感知和認知為基礎的,即車輛的智能化;而車輛的網聯化是智能化的實現手段,尤其在更高等級的自動駕駛系統中,需要更加豐富的信息來源,主要劃分為車內網、車際網和車聯網[3-4]。車內網能夠感知的范圍為百米級,更新周期為ms級;車際網感知范圍為千米級,更新周期為s級;車聯網感知范圍則更加廣泛,更新周期為s級甚至分鐘級。信息的來源和數據量,對各級網絡的帶寬、信息采集和處理能力提出了基本要求。
完整的自動駕駛系統,感知甚至決策不僅僅源于車端,云端的感知、決策通過車聯網這個特殊的傳感器單元,將全局感知和決策信息傳遞至車載控制單元。在此全局規劃的基礎上,車載傳感器感知局部環境信息,車載計算單元處理并理解全局目標與局部環境,并控制車輛依次完成局部控制目標,直至全局目標的達成。上述自動駕駛功能流程可由圖2所示的自動駕駛系統功能架構來描述。本文會對車載計算單元如何承載車載傳感器信息感知與處理、全局目標與局部環境理解、車輛執行機構控制等計算任務,展開調研和分析。
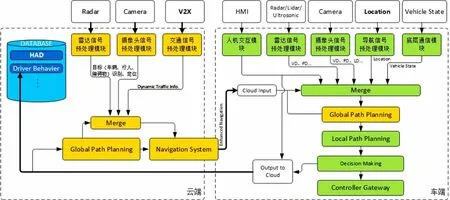
圖2 自動駕駛系統功能架構
2 自動駕駛計算任務劃分
根據對自動駕駛功能架構的分析,自動駕駛系統感知的來源主要有相機、毫米波雷達、激光雷達、高精度定位系統,分別獲取相機拍攝的環境圖片、毫米波接收到的電磁波回波、激光掃描出的環境點云數據等。數據的基本量級和獲取方式如圖3所示。最大可達每秒GB,獲取方式為LVDS、以太網、CAN、Flexray、MOST、LIN等車載網絡。
自動駕駛系統首先通過圖像、激光點云、基于位置的交通信息服務[3]、毫米波發射與接收回波間的差異,提取目標特征形成對環境中各類機動車、行人、路肩、護欄等物體的感知,以及對環境中車道線、交通信號、交通標志等交通信息的感知。然后基于全局目標和全局路徑規劃,應用車道、護欄、路肩等局部可行駛區域,以及可行駛區域中物體運動狀態的估計,規劃車輛的局部行駛路徑。最后將控制指令通過車載網絡發送至車輛執行機構,執行車輛縱向、側向控制,實現自動駕駛。自動駕駛各子模塊的功能劃分如圖4所示。
針對獲取的以上各子模塊分工,對應的處理方式包括了傳感器信息融合[10]、圖像處理[11]、激光點云處理[12]、數字信號處理、多狀態估計、模型預測控制、SLAM以及更底層的支持向量機、光流跟蹤[13]、模式識別、機器學習、深度學習等,以實現對環境中對車輛行駛有影響的目標的識別,并結合車輛自身動力學特性,去決策和規劃車輛的行駛路徑。
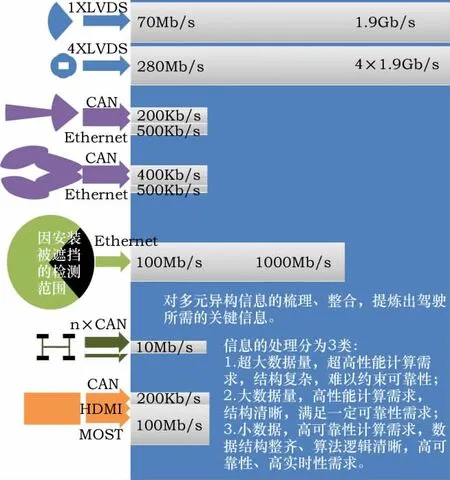
圖3 自動駕駛系統傳感器構成與信息數據量

圖4 自動駕駛系統組成與子模塊功能分析
3 自動駕駛計算任務對計算芯片的需求分析
自動駕駛計算任務對計算芯片的需求,主要分為計算力、實時性、可靠性、算法通用性等。計算力的需求一方面要考慮信息流的數據量,另一方面要考慮對信息的處理方法。
1)從信息流的數據量角度出發,分析各類信息處理對計算芯片的處理需求。將信息處理分為3類:①面向超大數據量 (GB級)的超高性能計算,系統復雜,且往往算法與硬件相關,難以約束可靠性,移植性和通用性較差;②面向大數據量 (百MB級)的高性能計算,系統復雜,但算法結構較為清晰,有一定的通用性和移植性,以及一定的功能安全需求;③面向小數據量 (MB級)的高可靠性計算,數據結構整齊,系統邏輯清晰,具備很強的通用性和移植性,有很高的可靠性、實時性需求,以及更高的功能安全需求。
2)從信息處理方法角度分析通用算法處理器、專用算法處理器。通用算法處理器適應性較強,可用于處理各種計算任務,如ARM、X86架構處理器;專用算法處理器用于處理專門的計算任務,比如在機器學習方面具備很強優勢的GPU、專門支持TensorFlow算法的TPU、可編程門陣列電路FPGA等。
4 對應自動駕駛控制系統需求的芯片分析
如前所述,由于涉及到不同數據量規模以及不同數據結構信息的處理,對處理器芯片的計算力、處理器架構有著不同的需求。在滿足計算力的前提下,功耗也是影響處理器芯片在車載系統中應用的關鍵。而自動駕駛的出發點是保證車輛的安全性,因此處理器的安全性和可靠性也是自動駕駛芯片選型中必須要考慮的因素。基于上述需求,對自動駕駛處理器芯片應用現狀和發展趨勢作簡要的總結。
4.1 計算力需求的滿足
自動駕駛對感知和復雜決策的需求,使得傳統的規則建模難以支撐復雜場景的應用,也難以支持OTA等自適應和自學習方式的算法。基于以上背景,深度學習以其靈活的建模方式和復雜場景的適應性,被廣泛認為是解決高等級自動駕駛的重要手段。在自動駕駛系統處理器選擇上,也與深度學習的技術路線有很大的重疊。深度學習算法復雜性比較高,需要有相應的嵌入式計算平臺進行匹配,在應用過程中硬件技術路線主要有GPU、SoC、FPGA、ASIC等。CPU由于在分支處理以及隨機內存讀取方面有優勢,在處理串聯工作方面較強;GPU在處理大量有浮點運算的并行運算時候有著天然的優勢;SoC提供多種可編程邏輯密度,硅片內集成多種系統級處理器硬核;FPGA可以使開發者在其硬件電路里原生支持特殊的復雜指令而不需要對指令進行分解和模擬;ASIC則是為某種特殊復雜指令定制的專用芯片,能夠帶來更加優異的計算力和功耗表現,如谷歌專為深度學習語言Tensor Flow設計的TPU。
計算力的評價指標主要有MIPS、FLOPS、TOPS等,分別表示處理器芯片處理指令、進行浮點型運算、進行整形運算的能力,主要通過常用基準程序測試計算,如Dhrystone、Whetstone、Linpack等。但是實際上I/O的效能、內存的架構、快取內存一致性、硬件能支持的指令等對芯片的處理速度都會產生影響。多核并行計算過程中,因為處理器架構不同,也會對綜合性能產生影響,如ARM架構芯片在多核并行計算中,根據應用不同會損失20%~30%的性能。而異構芯片在多核集成過程中,也會受到工藝的限制,比如ARM架構的cortex A72目前最多構成4核,通常應用以2個A72和4個A53形成SoC。
計算力評價指標是從不同角度對計算性能的評價,并不能真實反映算法部署時對計算力的需求,相關指標僅供參考,但是能夠給出一個比較直觀的計算力對比。ARM系列芯片通常應用Dhrystrone庫測試MIPS指標進行計算力對比分析,如圖5所示。

圖5 ARM架構芯片計算力對比分析
4.2 功耗需求的滿足
芯片功耗的來源主要有核心邏輯電路、時鐘樹、RAM、ROM等。功耗的大小與芯片供電電壓、晶振頻率、制造工藝等因素相關,通過降低工作電壓、應用新材料、3D/光學互連代替PCB布線、智能電源管理、集成電路生產工藝提升等方式優化處理器性能與功耗間的平衡,以滿足車載應用需求。比如一種20 nm芯片,將工作電壓從1.5 V降低至1.35 V,以節省67%的功耗;最新的微控制器和SoC運用智能電源管理單元,自動調整工作電壓與時脈速度來搭配工作負載;使用InGaAs增強未來三閘電晶體上的通道,可望使工作電壓降低至0.5 V;通過使用硅中介層功耗降低,僅為傳統PCB解決方案的17%;集成電路生產工藝的提高,如納米級的集成芯片設計,縮小了單管的尺寸,提高了芯片的集成度與工作頻率,降低了工作電壓,保證性能的前提下,從根本上降低了同樣計算力下芯片的功耗。但是工藝的提升會帶來芯片成本的增加,性能、成本、需求之間的綜合考慮,是產品設計的關鍵。目前自動駕駛芯片計算力和功耗比設計目標為1TFLOPS/W,但是隨著自動駕駛支持場景復雜度不斷提升,對計算力和功耗的需求將會是一個持續的綜合性能設計。
4.3 其他需求
為了平衡計算力、功耗、功能安全等需求,傳統的規則建模中應用的通用計算平臺,如DSP、PowerPC、ARM在自動駕駛芯片領域也有著重要的地位。在這類芯片上更容易在同一封裝內部實現雙核鎖步等校驗技術。
根據上述分析,可將自動駕駛芯片按計算力、成本角度劃分,如表1所示。根據不同階段的市場需求,在開發相應的自動駕駛功能過程中,需要從算法適用性、復雜度等多個角度深入分析算法對計算力的需求,選擇性能、成本綜合指標滿足需求的芯片方案。
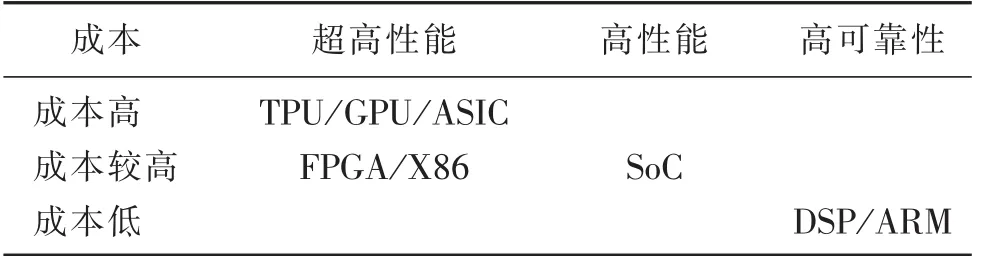
表1 自動駕駛芯片分類
5 基于自動駕駛軟件架構需求的域控制器平臺設計
自動駕駛需要統合車輛所有的環境感知、車輛狀態感知信息,協調影響車輛運動狀態的執行機構,以及協調車身控制器進行車輛內外部聲音、光學等交互信息,所以自動駕駛控制系統需要集中式的設計,來匯總和處理各類信息,協調各類輸出,因此自動駕駛控制系統的實現更加趨于一種中央域控制器的設計。
通過芯片的選型和集成,設計自動駕駛域控制器,首先要滿足各類信息的接入和采集;第二要具備異構信息的處理能力;第三要有滿足車載需求的功耗和散熱方式,以搭載自動駕駛相關控制算法在車載環境中得到應用。在自動駕駛域控制器實現過程中,目前研究中應用較為廣泛的有以下兩種方案:一種是以充分發揮GPU數據處理性能為核心的方案,如NVIDIA公司的Drive PX2自動駕駛控制平臺;另一種是依據算法負責程度分層在多類芯片中分別部署的多元異構芯片組合方案,如奧迪新A8采用的自動駕駛平臺zFAS。
Drive PX2自動駕駛控制平臺,支持12路攝像頭輸入、激光定位、雷達和超聲波傳感器基于16 nm FinFET工藝制造,但是其功耗可達250 W,且采用了水冷散熱的方式。這種高功耗和水冷的方式目前很難在車載領域得到應用,但是在技術研究領域,為一些控制算法的集成驗證提供了控制器平臺。
zFAS中NVIDIA TegraK1芯片為GPU架構芯片,用于環視和駕駛員檢測,Mobileye Q3為FPGA架構芯片,負責實現自動駕駛功能的視覺感知,Altera的Cyclone V為FPGA芯片,負責信息融合、高性能計算及部分決策控制。英飛凌的Aurix TC297T為DSP芯片,負責運行高可靠性和實時性較高的決策控制算法,并監測系統運行狀態,使系統滿足相應的功能安全等級要求,目前已實現量產。
更加多元的異構芯片的組合方案,通過對自動駕駛控制算法的分析和分解,將算法分層部署在滿足各類需求的芯片中,達到計算性能、功耗、功能安全等各方面綜合要求的滿足,在應用過程中會為算法的優化提供指導,另外芯片成熟度的提升也會降低成本并且更加符合功耗、功能安全等方面的需求,從而進一步促進自動駕駛相關功能和域控制器的逐步升級。
根據圖3信息量角度對自動駕駛控制系統的信息處理需求的劃分,進一步細化多元異構芯片組合的域控制器集成方式對自動駕駛需求的分層對應,如圖6所示。這種組合方式是平衡性能、成本、功耗、功能安全等各類自動駕駛需求的有效方案,且模塊化的層級劃分具備自然的升級換代的便利性,是目前自動駕駛系統應用的唯一解決方案,也是自動駕駛控制系統發展過程中的必然趨勢。

圖6 多元異構芯片組合對應各層自動駕駛算法需求
6 結論
依托于芯片、傳感器、算法的飛速發展和日趨成熟,自動駕駛技術的發展呈現一種多學科交叉、統合的態勢,已經不是簡單的組合,而是技術、應用、算法、軟件、硬件相互響應,相互促進的深度融合。自動駕駛芯片的選擇一方面要考慮其計算力、成本,來滿足基本的運算和產品化需求;另一方面需要綜合對比其事務管理功能、數據處理能力和運行速度、軟件編程和硬件設計的靈活性,來滿足設計、開發及產品生命周期管理的需求。
鑒于自動駕駛控制系統需求的復雜性,多元異構傳感器、多核異構芯片構成的控制系統的模塊化、分層化設計方式,是自動駕駛控制系統滿足其系統成本、功耗、實時性、設計開發、功能安全等各類需求的必然趨勢。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20