車輛盲區監測系統綜述
2018-11-01 01:17:08趙志成張玉峰
汽車電器 2018年10期
趙志成, 張玉峰 ,2, 何 佳 , 戎 輝
(1.中國汽車技術研究中心有限公司,天津 300300;2.河北工業大學,天津 300132)
經濟的增長、科技的進步,促使汽車工業飛速發展,隨著車輛保有量的不斷增加,道路交通壓力增大,引發了一系列的交通問題,導致乘車出行的安全性降低。中國平均每年發生約50萬起交通事故,死于車禍的人數高達10萬[1]。造成交通事故的原因多種多樣,其中30%的交通事故是由車輛盲區造成的。車輛盲區的危害不容忽視,研發設計有效而可靠的車輛盲區監測系統成為車輛主動安全領域的研究重點。
1 車輛盲區的形成原因及分類
車輛的自身結構導致車輛不可避免地存在視覺盲區。同時,車輛行駛時受到地形的影響、交叉路口建筑物的遮擋、其他交通工具的遮擋以及轉彎時的內輪差效應也會形成視覺盲區。
車輛盲區主要分為:車頭盲區、車尾盲區、車底盲區、后視鏡盲區、AB柱盲區、轉彎盲區,如圖1所示。
1.1 車頭盲區
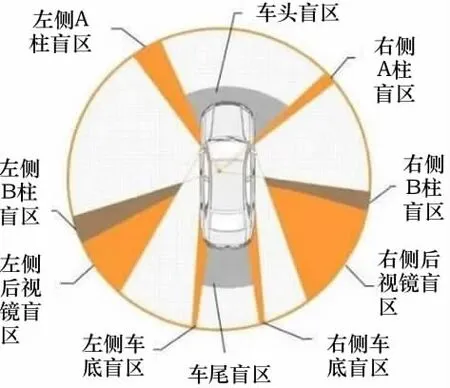
圖1 車輛盲區分類
由于車前引擎蓋的遮擋,駕駛員只能看到距離車頭較遠的區域,而距離車頭較近卻無法看到的區域即為車頭盲區。車輛自身的高度、車頭的長度、駕駛員的身高坐姿以及駕駛之前對座椅的調整都會影響車頭盲區的大小。車頭盲區是半盲區,當前方的障礙物高度低于車頭高度時,駕駛員將察覺不到障礙物的存在,形成潛在的安全隱患。同時,許多車輛追尾事故的發生也是由于車頭盲區的存在而導致駕駛員不能準確判斷本車與前車的距離而造成的。
1.2 車尾盲區
駕駛員通過車內后視鏡觀察車輛后方的路況時,由于后備廂的遮擋而觀察不到的區域稱為車尾盲區。車尾盲區與車頭盲區一樣,也屬于半盲區。車尾盲區的大小同樣受車尾的長度、駕駛員的身高坐姿、車輛自身高度以及座椅調整的影響。倒車時,如果車尾盲區內有高度低于車尾高度的障礙物,極易發生碰撞事故。
1.3 車底盲區
由于車輛C柱的遮擋,駕駛員通過后視鏡無法觀察到后輪附近車身兩側的區域稱為車底盲區。盲區的大小受到車輛自身高度、后視鏡大小規格以及安裝角度的影響。
1.4 后視鏡盲區
駕駛員通過車輛左右后視鏡觀察到的范圍是有限的,可觀察到的區域是以左右后視鏡為頂點,車身一側縱向線為始邊,向外展開30°左右的扇形區域,該區域之外駕駛員無法觀察到,進而形成后視鏡盲區。在行駛過程中,如果本車駕駛員有變道意圖,而后視鏡盲區中此時有車輛行駛,則容易發生交通事故。
1.5 AB柱盲區
A柱與B柱作為車身結構的一部分,其存在導致駕駛員的視線被部分遮擋,進而形成盲區,即AB柱盲區。影響盲區的大小的因素主要包括A、B柱的寬度和駕駛員與A、B柱的距離,A、B柱的寬度越大、駕駛員離A、B柱的距離越近,則盲區的范圍就越大。當車輛進行大角度的右轉彎時,此時B柱盲區對駕駛員的視線影響最大,如果本車右側附近有行駛的車輛,則可能發生碰撞事故。
1.6 轉彎盲區
車輛轉彎時,內側前輪的轉彎半徑大于內側后輪的轉彎半徑,形成內輪差,如圖2所示。內輪差的存在使得轉彎時車輛內側形成轉彎盲區,駕駛員難以準確判斷是否可以順利轉彎而不刮蹭或者碰撞內側的行人或者車輛,導致交通事故發生的可能性大大增加。

圖2 轉彎盲區
2 國內外發展現狀
針對車輛盲區引起的各種安全隱患,設計一套有效的車輛盲區監測系統成為國內外各大汽車生產廠商、高校以及相關研究機構共同的研究方向。經過多年的發展,多種預警方案已經被提出并應用到實車上。
BLIS(盲點信息系統)由沃爾沃公司研發,其利用攝像機對車輛兩側的路況進行監測,適用于各種條件下的路況。安裝在左右后視鏡根部的攝像機對左右后視鏡盲區進行25幀/秒的圖像監控,監測范圍的寬度為3 m,長度可達10 m。當有車輛或行人進入盲區時,系統通過對比圖像中目標的接近程度,判斷盲區路況是否存在危險,并通過安裝在左右后視鏡支柱上的警示燈來提醒駕駛員注意該盲區的路況。該系統自2005年起,相繼應用在了XC70、V70等車型上。到現在為止,已裝備在沃爾沃、福特等不同汽車生產廠商的多種車型上。
奧迪公司開發的側向輔助系統 (Audi Side Assist)通過毫米波雷達實現對車輛盲區的監測,該系統在車速超過60 km/h后開始工作,可監測本車后方50 m范圍內的車輛,當系統判斷盲區中存在安全隱患時,安裝在左右后視鏡邊框上的指示燈將會亮起,警示駕駛員此時并線存在危險。
國內對車輛盲區監測系統的研究主要集中在視覺技術上,雖然研究起步較晚,但經過多年的努力探索,獲得了一定的技術突破。吉林大學交通學院研究了基于視頻的的自行車監測方法,通過對比多幅圖像中同一自行車的空間位置判斷自行車是否在車輛的窗口空間中,從而實現了對車輛周邊自行車的實時監測[2]。國防科學技術大學提出了一種高速公路車道偏離警告系統,利用工業攝像頭獲取路況信息,通過提取圖像中的車道線以及預測之后的行車軌跡,成功實現了對車輛偏離車道的監測[3]。眾所周知,攝像機采集的圖像數據信息量大,并且圖像中的目標受光照、拍攝角度等條件的影響,同時車載計算機的運算能力有限,這些因素將使得盲區監測結果的精確性與實時性下降。研究設計魯棒性好、實時性強的車輛盲區監測系統將成為今后的研究重點[5]。
3 車輛盲區監測系統的組成
車輛盲區監測系統由4部分組成,包括盲區信息采集模塊、數據處理模塊、信息顯示模塊、聲光報警模塊。盲區信息采集模塊主要由各種傳感器組成,如攝像頭、雷達等,旨在采集盲區的路況信息,并將采集到的信息傳送給數據處理模塊。數據處理模塊的作用是對盲區路況信息進行處理并作出相應決策,使用的主流設備有單片機、ARM處理器、高性能計算機等。信息顯示模塊使用的設備是顯示屏,其作用是將數據處理模塊分析、處理后的信息或圖像在顯示屏上顯示出來,使駕駛員實時了解盲區的路況。聲光報警模塊包括語音報警裝置和報警指示燈,當數據處理模塊判斷盲區路況存在危險時,語音報警裝置發出危險警報,同時報警指示燈亮起,提醒駕駛員采取必要的安全措施。
盲區信息采集模塊是監測系統的核心,采集的信息品質將影響最終監測結果的準確性,而信息品質又依賴于傳感器。應用于盲區監測的傳感器主要有紅外測距傳感器、毫米波雷達、超聲波雷達、激光雷達、攝像頭等,在距離探測方面有著各自的優勢與不足。
紅外測距傳感器的成本低、測量范圍廣、實時性強,測量時不受雨雪、霧霾、風沙天氣的影響,晝夜均可工作,但測量距離較短。毫米波雷達測距精度高,能同時識別多個目標,具有成像能力,但在雨、雪、霧環境下其探測距離會有所降低。超聲波雷達測距指向性強、能耗小、探測距離遠,但超聲波的傳播速度受環境溫度影響,不穩定,因而在測距過程中,測距時間的準確性較差,使得測距結果精度較低。激光雷達測距實時性強,不易受外界因素干擾,并且具有較高的分辨率,能同時跟蹤多個遠距離目標,但易受不良天氣影響,在大雨或有濃煙、濃霧的環境下,衰減嚴重,導致測距不準甚至失效。基于攝像頭的視覺測距通過對盲區路況圖像的實時獲取,利用計算機視覺處理技術監測、跟蹤圖像中的目標,通過對比不同圖像中的同一監測目標計算出本車與所監測目標之間的實際距離。但是,光線的強弱、大雨或霧霾等惡劣的天氣條件以及是否在夜間拍攝對測量結果的準確性影響較大。同時,當車輛快速行駛,圖像數量快速增加,而系統處理圖像的能力有限,測量結果的實時性則不可避免會有所下降。
4 車輛盲區監測系統的工作原理
對車輛盲區監測系統而言,雖然不同的設計方案采取的探測設備不同,但其工作原理相同。盲區信息采集模塊實時監測車輛盲區的路況,將采集到的信息或者圖像數據進行初步轉換處理后傳輸給數據處理模塊,數據處理模塊把接收到的信息進行分析、處理,對盲區路況的安全情況作出判斷,并將處理結果在顯示模塊上實時顯示出來,使駕駛員及時了解盲區路況。同時,根據數據分析結果,如果盲區路況存在危險,數據處理模塊則向聲光報警模塊發出啟動指令,之后語音提示響起,預警指示燈亮起,駕駛員根據提示作出相應的安全處理,從而避免危險發生[4]。
5 展望
單一的傳感器探測存在著種種不足,進行多傳感器的信息融合已成為車輛盲區監測系統的研究重點[6]。隨著傳感器應用技術、數據處理技術的不斷發展進步,多傳感器信息融合技術在車輛盲區監測系統中的應用會更加普遍,監測結果也會隨之更加準確可靠。
深度學習作為機器學習領域的一個新興的研究方向,經過近幾年的發展,其在計算機視覺、語音識別等領域取得了顯著的成就[7]。在計算機視覺領域,深度學習和傳統的計算機視覺技術相比,其對圖像的識別處理更加精確和智能。將深度學習應用到車輛盲區監測系統,將會使視覺探測的結果更加準確,有利于駕駛員對盲區的路況做出合理、準確的判斷,進而采取合理的措施,降低危險發生的可能性,使駕駛更加安全。由此可見,深度學習在汽車盲區監測系統視覺探測方面的研究應用是大勢所趨,是未來的重點研究方向之一。
無人駕駛技術是近年來汽車行業與互聯網行業研究的熱點,其研究領域包括環境感知、高精度定位、自動化控制、人工智能等,是現代諸多高新科技高度融合的產物。車輛盲區監測技術是無人駕駛技術的一個重要組成部分,其對盲區路況監測結果的準確與否直接影響著無人駕駛汽車行駛時的安全性與可靠性。車輛盲區監測技術的進步,將推動無人駕駛技術的進一步發展,為以后無人駕駛汽車走進大眾生活打下堅實的基礎。
6 總結
車輛盲區造成的危害關系我們出行的安全,對車輛盲區監測系統需要進一步的深入研究。雖然,當前車輛盲區監測系統還存在著不足,但隨著環境感知、深度學習、多傳感器信息融合等技術的進步,相信未來車輛盲區監測系統的功能會更加完善,監測結果會更加可靠準確。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
汽車電器(2018年1期)2018-06-05 01:22:54
家庭影院技術(2017年9期)2017-09-26 03:41:45