重載AGV車輛跟蹤算法和運動特性研究
2018-11-14 08:53:06吳寧強李文銳王艷霞翟兆陽
重慶理工大學學報(自然科學) 2018年10期
吳寧強,李文銳,王艷霞,翟兆陽
(1.西安航空學院 汽車檢測工程技術研究中心, 西安 710077; 2.北京無線電計量測試研究所, 北京 100854; 3.西安交通大學, 西安 710048)
自動導引車(automatic guided vehicle, AGV)是一種無人駕駛的導引運輸車。AGV系統涉及機械、電子、光學、計算機等多個領域。近些年來,重載AGV車輛逐漸應用于不同的場合,在生產過程中發揮著重要的作用,尤其在汽車生產線上,可大大提高運轉效率、精度,減少人力和勞動成本[1-3]。
AGV小車控制系統分為導引、通訊、驅動、供電、安全與輔助5大模塊。其中AGV小車導引單元按導引方式大致為磁導引、光學導引以及慣性導引,AGV小車通過導引單元捕捉路面相關提示信號(磁信號、光學信號等),將這一信號傳遞給主控單元PLC,PLC處理信號后向驅動單元的伺服電機發送命令使電機做出調整,從而使AGV小車在規定的路徑上行駛[4-5]。
本文以雙舵輪驅動轉向的AGV小車為研究對象,建立的模型如圖1所示。它的底盤部分由前、后橋的舵輪機構和從動萬向輪組成,每個舵輪兼顧驅動和轉向2個功能,舵輪的驅動和轉向由4個直流伺服電機控制。轉向舵輪支架旁外掛1個無接觸起電感應器,為了保持平衡起電器支架旁安裝1個萬向輪支撐。小車還安裝有4個從動萬向輪,這些從動輪負責承載車架負載和保持平衡。

圖1 建立的雙舵輪AGV模型
1 AGV導引與軌跡跟蹤
1.1 AGV單舵輪轉角運動模型和定位算法
AGV導航需要知道自己相對于環境坐標系下的精確坐標。而對于坐標的尋找離不開定位算法。在舵輪驅動AGV的尋位原理和算法中所有模型均建立在如下幾點假設上:
1) AGV車身看成剛體。
2) AGV舵輪與其他行走輪間機械結構不計摩擦阻力,忽略車體的慣性阻力和慣性力矩。圖2為運動解析圖。
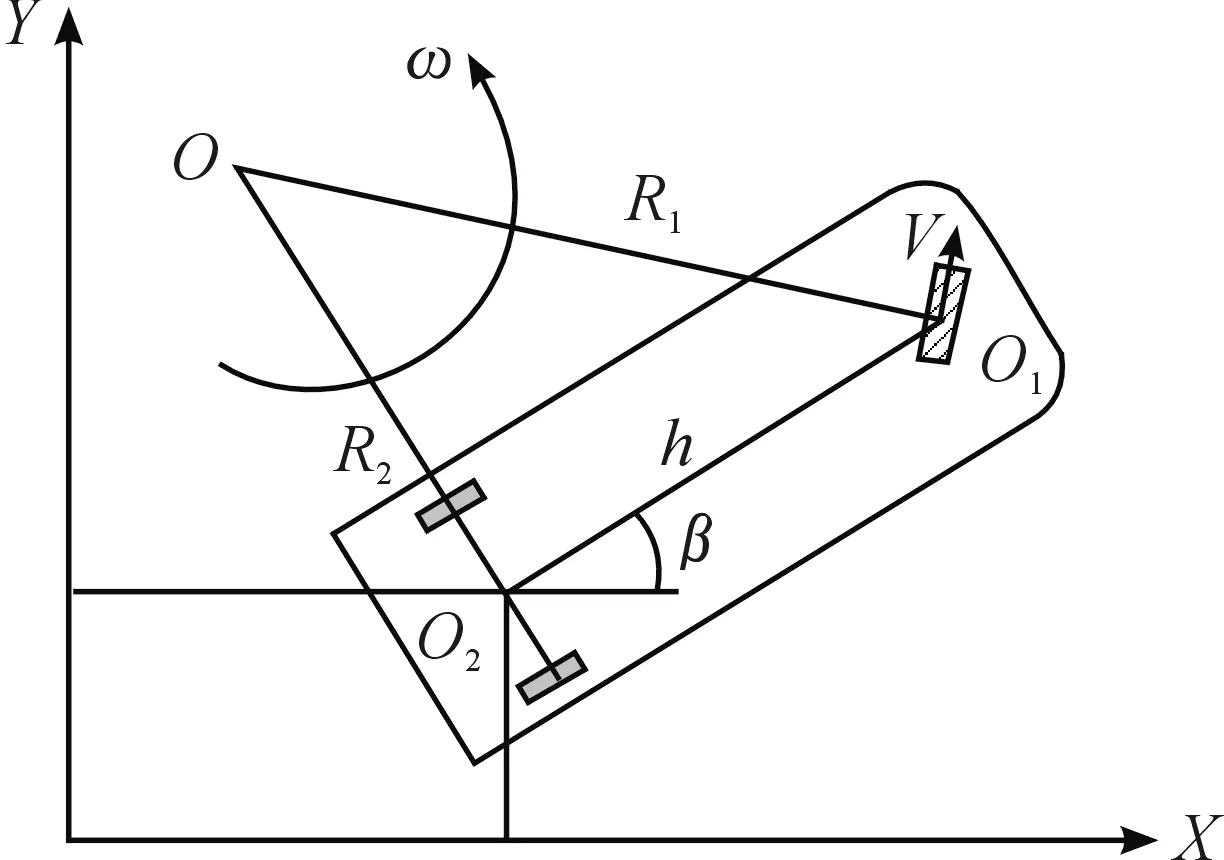
圖2 單舵輪AGV運動解析圖
在單舵輪AGV運動模型中,給前舵輪1個轉向角α,設前舵輪的速度為V, AGV小車會繞O點做轉動。設角速度為ω,前后中心點O1、O2到AGV小車轉動瞬心O點的距離分別為R1、R2。O1、O2之間距離為h,設AGV前進方向與X軸正向(逆時針為正)的夾角為β。小車逆時針轉動時α取正值,反之取負值。設Vx、Vy分別為后輪中心點O2速度的水平分量和豎直分量,初始時刻為0 s,小車初始方向角為β0,則位置坐標x和y如下:

(1)
(2)
β=β0+ω×t
(3)
Vx=V×cos(α)×cos(β)
(4)
Vy=V×cos(α)×sin(β)
(5)
1.2 AGV雙舵輪轉角運動模型和定位算法
在雙舵輪AGV轉彎時兩輪都產生1個轉動角度,如圖3所示。
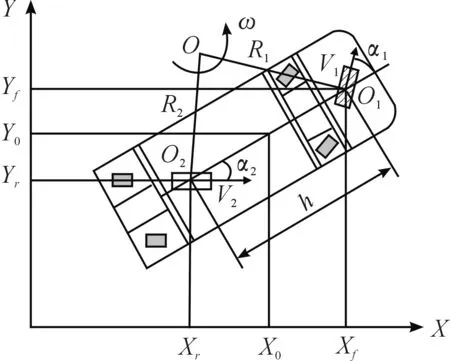
圖3 雙舵輪AGV運動解析圖
設前舵輪轉過α1,速度為V1。后舵輪轉過α2,速度為V2。小車轉動瞬心為O,前舵輪中心為O1,后舵輪中心為O2,O1和O2的距離為h,角速度為ω,現在通過觀察ΔO1OO2得
∠O1OO2=α1+α2
(6)
根據正弦定理得:
(7)
AGV小車轉彎行駛時間為t,u為積分變量。Xr、Yr為后舵輪軌跡坐標,Xf、Yf為前舵輪軌跡坐標,X0、Y0為前后舵輪連線中點的軌跡坐標,將其設為小車的軌跡參考點。則坐標公式為:
(8)
(9)
(10)
(11)

(12)
(13)
這樣AGV結合2種算法和舵輪速度與轉角編碼器的信號就可以知道AGV任意時刻前輪和后輪的坐標位置信息和方向角信息。現在將前后舵輪中點坐標(X0,Y0)視為AGV軌跡參考點。
1.3 AGV算法部分曲線運動軌跡和轉彎動力學穩定性分析
通過建立的AGV運動學模型,代入相關參數,通過Matlab擬合雙舵輪AGV在汽車廠的運動路線。圖4為建立的雙舵輪和單舵輪AGV的理論1/4圓弧軌跡模擬,控制AGV單舵輪轉角為20°,速度為1.41 m/s;雙舵輪AGV前、后舵輪同步轉過20°,舵輪速度為1.41 m/s。單舵輪小車參考點速度為1.32 m/s,角速度為0.205 rad/s;雙舵輪小車速度為2.65 m/s,角速度為0.820 rad/s。其轉彎半徑分別為單舵輪6.87 m,雙舵輪3.435 m,雙舵輪的轉彎半徑明顯小于單舵輪小車。
由單舵輪和雙舵輪的理論軌跡可見:單舵輪轉彎半徑較大,而且轉彎時后輪往往要與地面產生滑動摩擦,增大了零件的磨損和行駛阻力;雙舵輪驅動的AGV在路徑轉彎上軌跡良好,車輪與地面為滾動摩擦,在一些特定場合,雙舵輪AGV車輛會采用子午線輪胎,其橫擺角速度和穩定性對AGV的運行非常重要。圖5為雙舵輪AGV的轉彎動力學分析。
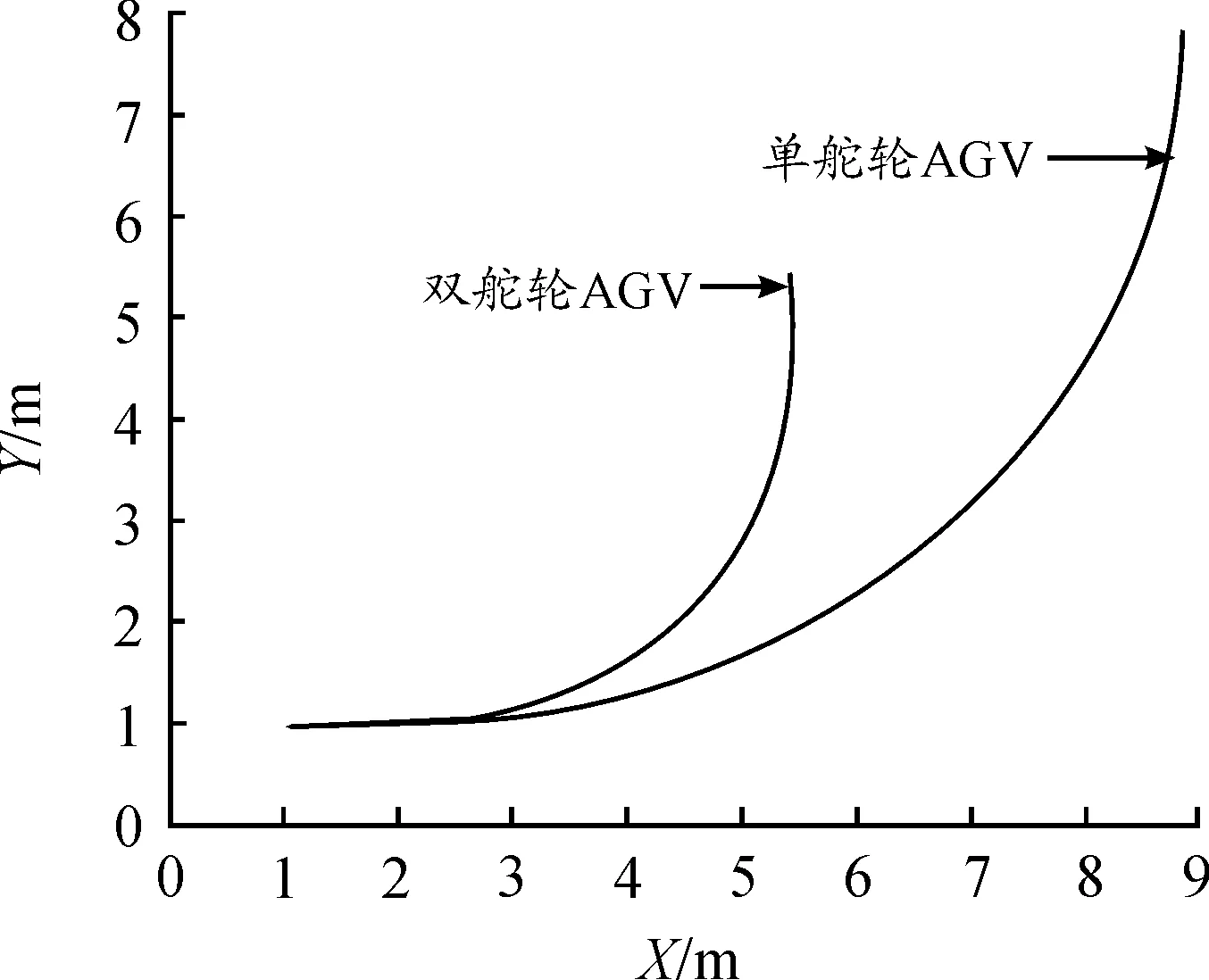
圖4 單、雙舵輪1/4圓弧參考點理論軌跡
圖5 雙舵輪AGV轉彎動力學分析
為了便于分析,模型簡化為線性二自由度的雙舵輪車輛模型,并做如下假設:
1) 重載AGV車廂只做相對于地面的平面運動。忽略懸架對AGV小車的影響[6]。
2) 沿X軸方向速度u保持不變,AGV小車側向加速度在0.4g范圍內[7]。
3) 驅動力不大,不考慮對輪子側偏特性的影響和忽略回正力矩的影響。
圖5中:m為車輛質量,m=2 000 kg;a、b分別為質心到前后舵輪中心點的距離,a=1.6 m,b=0.9 m;k1和k2分別為前后輪側偏剛度,k1= -52 618,k2= -110 185;v0為質心速度,u為質心速度沿小車前、后舵輪中心點連線方向上的分量,其大小為1.5 m/s,v為質心速度垂直于小車前后舵輪中心點連線的分量,前后舵輪轉角為δ0,大小為π/6,β=ν/μ,小車絕對加速度沿軸OY的分量為

(14)
前后輪側偏角:
β-δ
(15)
(16)
進一步得到AGV小車轉彎的單自由度強迫振動微分方程:

(17)
其中:ω0為固有圓頻率,大小為41.583 9 rad/s;ζ為阻尼比,大小為1.038 7;常數B0=2 078.9。利用Matlab對上述微分方程求解,結果如圖6所示。
圖6 橫擺角速度仿真
在角階躍δ下,橫擺角速度是一條單調遞增逐漸趨近于穩態角速度的大阻尼曲線[8],其中穩態角速度和穩定因數為:
×δ0×m0)/c
(18)
(19)
代入參數得穩定因數K=8.266 8×10-4,穩態角速度為0.629 5 rad/s,由于K>0且轉向角速度收斂于穩態角速度,所以雙舵輪AGV的穩態轉向為不足轉向特性[9],是一種穩定情況且角速度響應迅速。衡擺角速度增益
(20)
運用Matlab仿真穩態橫擺角速度增益,結果如圖7所示。

圖7 穩定因數仿真
因衡擺角速度需要一定時間才能到達穩態值,而這段時間小車也在運動,所以實際轉彎軌跡與理論轉向軌跡不同,其中小車角速度穩定時間為0.3 s時,重載AGV車輛角速度才趨近于穩定狀態,因而理論與實際車輛軌跡會出現一定誤差。圖8為利用Matlab對理論與實際誤差的模擬情況。紅色為理論轉向軌跡,黑色為實際軌跡,其中理論轉彎與實際轉彎的圓心坐標X軸精度為 0.018 7 m,Y軸精度為0.026 8 m。

圖8 重載AGV 1/4圓軌跡
2 AGV轉彎誤差分析及補償
前面分析了AGV的轉彎穩定性,而重載AGV轉彎時不光存在角速度失穩的情況,實際上由于電機的響應問題會造成小車轉彎的理論軌跡與實際軌跡發生偏差。以下對這一偏差進行分析。實驗用雙舵輪AGV小車部分參數如下:輪距L=2.5 m,額定轉速為2 200 r/min,速度比為1∶100,最大角加速度為46 rad/s2,最大角速度為2.3 rad/s,電機加速時間為0.05 s,舵輪最大轉角為±60°,AGV小車設定轉角為33°,車速u=90 m/min。
為了分析需要把舵輪電機角速度響應分為3個階段:勻加速、勻速、勻減速。利用近似離散化數值積分的方法對響應階段進行分析,以0.025 s為最小時間參數分割。在Matlab環境下進行模擬。圖9和10分別為AGV舵輪角度增加函數和角速度變化函數[10]。

圖9 AGV舵輪角度增加函數
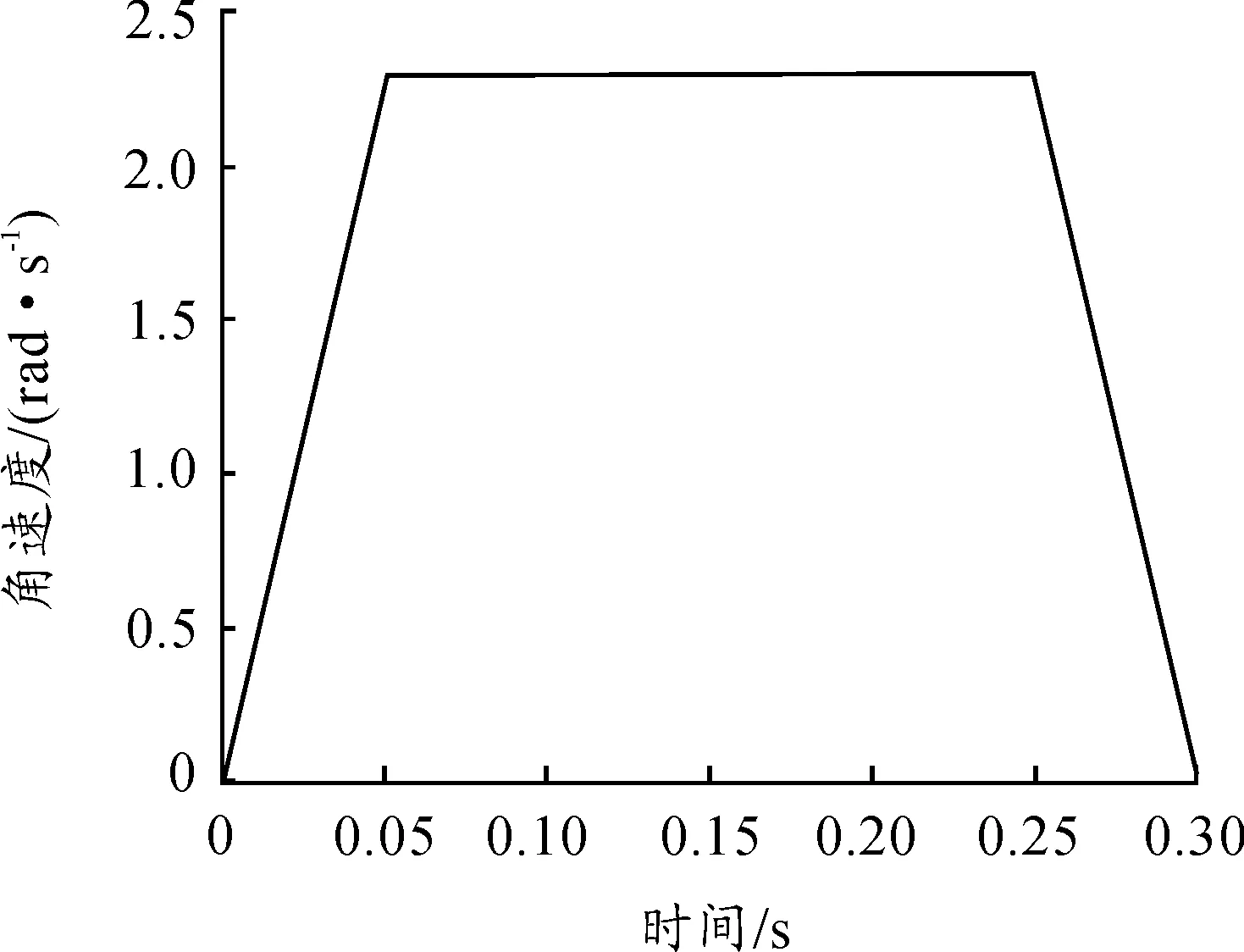
圖10 AGV角速度變化函數
設AGV小車需要轉過一個1/4圓弧段路徑,這也是應用在汽車廠的常見路徑。彎道起點坐標X=1,Y=1,在Matlab中對AGV參考點理論曲線和實際路線進行仿真(包括補償后路徑仿真),結果如圖11所示。
圖中理論圓心坐標為(1,2.928 9),實際圓心坐標為(1.209 5,2.931 1),補償后圓心坐標為(1.009 5,2.931 1),補償量為0.20 m,補償前X軸誤差為0.209 5 m,補償前Y軸坐標誤差為0.002 2 m,補償后X軸誤差為0.009 5 m,補償后Y軸坐標誤差為0.002 2 m。可以看出:通過控制AGV小車以X軸補償量經過提前轉彎,可以較大幅度地減小彎道處的軌跡誤差。
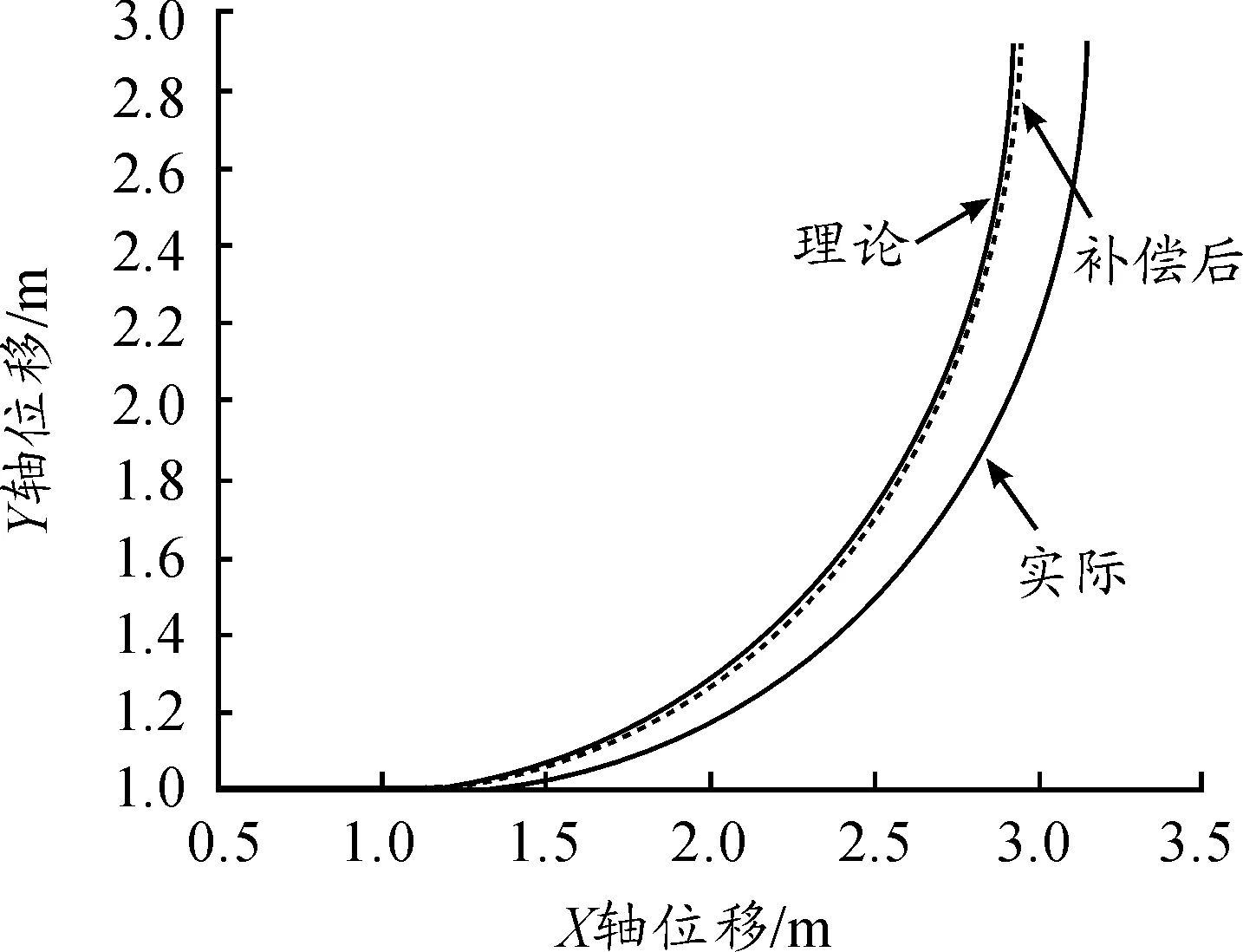
圖11 雙舵輪AGV曲線路徑
3 結論
1) 建立單、雙舵輪的運動模型,通過Matlab計算單、雙舵輪1/4圓弧參考點理論軌跡,雙舵輪轉向是一種較穩定的工況。
2) 通過對雙舵輪AGV路徑跟蹤技術的研究分析,從動力學角度驗證了其轉向靈敏性和角速度對小車的影響,又從電機響應角度分析了AGV小車的軌跡誤差存在的原因。
3) 通過控制AGV小車以X軸補償量經過提前轉彎,可以較大幅度地減小彎道處的軌跡誤差。
