改進CUSUM算法的工控系統(tǒng)入侵檢測方法
2018-11-17 01:46:12魏戰(zhàn)紅王展鵬宋玉寶趙國新
計算機工程與設計 2018年11期
魏戰(zhàn)紅,王展鵬,王 安,宋玉寶,趙國新
(1.北京石油化工學院 信息工程學院,北京 102617;2.北京化工大學 信息科學與技術(shù)學院,北京 100029;3.北京郵電大學 網(wǎng)絡與交換技術(shù)國家重點實驗室信息安全中心,北京 100876)
0 引 言
針對工業(yè)控制系統(tǒng)(industrial control system,ICS)面臨的信息安全威脅[1-5],入侵檢測系統(tǒng)可以有效監(jiān)控系統(tǒng)的運行狀態(tài),檢測入侵行為,為下一步采取安全應對措施,提供依據(jù)[6,7]。
入侵檢測在ICS環(huán)境有如下特殊要求:不能影響ICS本身的可用性、穩(wěn)定性[8];實時性高,檢測速度快[9];ICS節(jié)點的CPU計算能力往往較弱,檢測算法需要簡單高效[10]。針對以上要求,CUSUM(cumulative sum)算法檢測速度快,計算簡便,適用于ICS。CUSUM算法不斷改進,李等[11]使用柯爾莫哥夫不等式對CUSUM偏移常數(shù)β進行改進。周[12]提出了基于變點CUSUM方法的正態(tài)過程方差的CUSUM控制圖,在檢測大漂移上效率高。張[13]針對非參數(shù)CUSUM算法,設計了自適應偏移常數(shù)β。但是目前的研究往往不能滿足ICS高可用性、高實時性、高檢測速度的要求。
本文分析了ICS特點,改進了CUSUM算法,給出了一個基于改進CUSUM算法新的入侵檢測方法。該方法首先以傳感器獲取的實際值和模型的預測值之間的差值為統(tǒng)計序列。然后根據(jù)3σ原則設計偏移常數(shù)β,并決定門限值τ的取值。最后使用偏差攻擊和幾何攻擊對該入侵檢測方法進行實驗,驗證改進的CUSUM算法能夠準確快速地檢測出入侵,其誤報率較低,適用于ICS環(huán)境。
1 ICS入侵模型

當ICS被攻擊時,被攻擊的傳感器測量信號y′將出現(xiàn)偏差。若y′超過上下限,將檢測到異常,觸發(fā)上下限報警。若y′仍然在上下限范圍內(nèi),測量值如下
(1)
式中:Ka表示被攻擊的時間序列,ai(k)是被攻擊時的測量值,其仍在上下限范圍內(nèi)。ICS中被控對象的輸入uk決定了輸出y(k)。給定被控對象的輸入uk,通過下式ICS模型可求得期望輸出
(2)
式中:x(k)=(x1(k),…,xn(k))為k時刻系統(tǒng)輸入,y(k)=(y1(k),…ym(k))為k時刻傳感器的測量值,矩陣A為狀態(tài)矩陣,矩陣B輸入矩陣,C為輸出矩陣。
2 改進CUSUM入侵檢測方法
2.1 CUSUM算法
CUSUM算法是一種變化檢測方法,它可以檢測到統(tǒng)計過程均值的變化。CUSUM算法原理是:如果從某點開始有異常出現(xiàn),則序列的概率分布會發(fā)生改變。整個數(shù)列的均值或者方差也發(fā)生變化,可判定從該點起為異常。
假設變量x,在無攻擊的正常時刻,其統(tǒng)計分布概率為P0,攻擊發(fā)生后,其統(tǒng)計分布概率為P1。CUSUM算法中N為停止時間,S為累加和。假設S(0)=0,則有

(3)
函數(shù)a為
(4)
停止時間N為
N=inf{n:S(n)≥τ}
(5)
式中:inf為下確界,取滿足條件的最小值。檢測的判定公式
(6)
d(N)用于判斷檢測序列是否發(fā)生變化,τ作為判定入侵的門限值。在n時刻,S(k)>τ,則檢測到異常,發(fā)出警報。可以看出,CUSUM算法將變化檢測問題轉(zhuǎn)化為S(k)和τ的大小比較問題。報警門限值τ決定誤報率,τ越小,誤報率越高,檢測性能越靈敏。
當CUSUM算法用于ICS入侵檢測時,存在一定的局限性:由于log[p0(x(k))/p1(x(k))]計算復雜,占用CPU資源較多,很難獲得統(tǒng)計分布概率P0、P1。而且ICS中各節(jié)點CPU能力較弱,使得檢測時間較長,無法滿足ICS入侵檢測對高實時性的要求。
2.2 改進CUSUM算法


(7)
正常狀態(tài)下,傳感器測量值與預測值幾乎相同,差值Δk是一組接近于0的序列;當攻擊發(fā)生時,Δk將產(chǎn)生較大變化。Δk與log[p0(x(k))/p1(x(k))]有相似的變化,可將log[p0(x(k))/p1(x(k))]簡化為差值Δk。
根據(jù)CUSUM算法要求,正常狀態(tài)下,需要S(k)<0;攻擊發(fā)生后,需要S(k)>0。所以引入一個正值常數(shù)β,讓大部分Δk-β<0,定義
x(k)=Δk-β
(8)
x(k)作為被檢測序列,β是一個比較小的正值常數(shù),使得在正常狀態(tài)下,期望E(x(k))<0;在攻擊發(fā)生后,期望E(x(k))>0。累加和S(k)計算如下

(9)
根據(jù)式(4)定義的函數(shù)a+,式(9)中累加和S(k)只累計x(k+1)+S(k)為正的值,所以正常狀態(tài)下,S(k)=0。攻擊發(fā)生時,Δk變大,x(k)>0,S(k)開始累加。
根據(jù)式(6),當S(k)>τ時,判別函數(shù)d(N)=H1,表示系統(tǒng)處于被攻擊狀態(tài);S(k)≤τ時,d(N)=H0,表示系統(tǒng)處于正常狀態(tài)。τ越小,約束越嚴格,檢測時間越短,越容易誤報。
2.3 參數(shù)選取
算法參數(shù)β和τ的取值直接影響檢測算法的性能。液位控制系統(tǒng)的液位量在正常運行時,預測值Δ和測量值y的差值Δk符合正態(tài)分布,則Δk在(μ-3σ,μ+3σ)中的概率為0.9974(μ為期望,σ為標準差)。式(8)中x(k)的期望值需要滿足E(x(k))<0,假設β取值為3σ,則x(k)=Δk-β<0的概率為0.9974,期望E(x(k))<0。

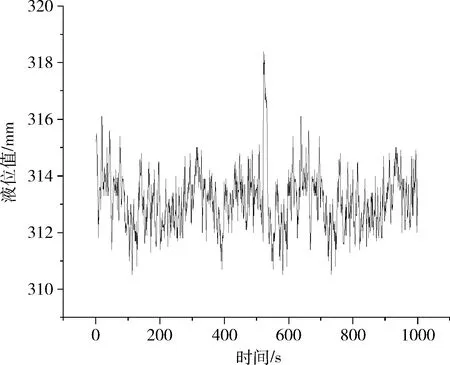
圖1 液位測量值分布

圖2 測量值與預測值的差值分布
τ為報警門限值,若S(k)>τ,則檢測出異常。τ越小,S(k)越快到達τ報警門限值,檢測時間N越短,其誤報率越高(液位控制系統(tǒng)的要求液位320 mm以內(nèi),在此偏差內(nèi)報警屬于誤報)。τ的取值要綜合考慮檢測時間和誤報率。在正常狀態(tài)下,檢測系統(tǒng)根據(jù)不同的τ值計算誤報率。如圖3所示,在τ值為19.8時,誤報率為0.1%,理論上取τ值為19.8,即可保持低誤報率。
由于S(k)與采樣周期有關(guān),如果采樣周期很小,即使小偏差也可以使S(k)很大。本系統(tǒng)選用1 s的采樣周期,采用比例攻擊仿真來選擇τ值。τ取值與檢測時間關(guān)系如圖4所示,檢測時間隨τ變大而變長。τ取值19.8時,檢測時間為5 s。對于液位控制系統(tǒng),5 s的檢測時長滿足要求。綜合考慮了檢測時間和誤報率后,選取τ值為19.8。
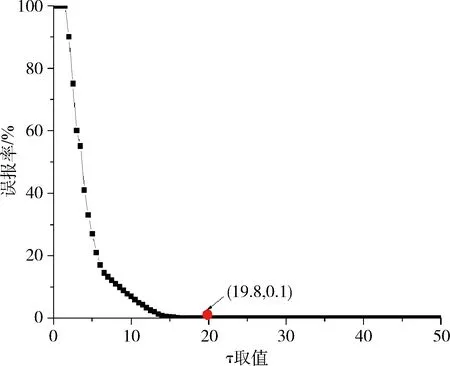
圖3 τ取值與誤報率關(guān)系

圖4 τ取值與檢測時間關(guān)系
3 方法檢驗和結(jié)果分析
通過模擬攻擊者對控制系統(tǒng)攻擊,檢驗改進CUSUM入侵檢測方法的性能。攻擊目標是液位傳感器,使用欺騙手段,對傳感器測量值進行修改。
3.1 偏差攻擊
偏差攻擊是指傳感器測量值y(k)被引入了偏差δ(偏差不足以觸發(fā)上下限報警),使得控制效果不理想,甚至造成現(xiàn)場危險。液位傳感器的正常范圍在[0,320],超過320 mm觸發(fā)上限報警。加入偏差δ后,液位傳感器值為
(10)
使用Matlab進行仿真攻擊,使用不同δ值,先討論在上升期的情況下。上升期,罐內(nèi)進行注水操作,液位不斷升高至設定值313 mm。攻擊者對液位傳感器使用偏差攻擊,偏差攻擊值δ分別取0、5、30、100,時間范圍[0,1200]。偏差攻擊下的液位曲線如圖5所示,偏差攻擊使液位無法到達設定值,設定值和實際值的差值即為δ值。攻擊危害出現(xiàn)時刻是液位到達篡改值的時刻(即設定值減去攻擊偏差δ值)。攻擊下液位與預測液位之間的差值曲線如圖6所示,從攻擊威脅出現(xiàn)時刻起,差值Δk開始變大,直到Δk=δ。當Δk>β后,S(k)開始累加。在偏差攻擊δ值分別取0、5、30、100時,改進CUSUM算法檢測時間見表1。當δ=0時,相當于沒有攻擊,是系統(tǒng)正常狀態(tài);當δ=5時,在641 s實際值與預測值產(chǎn)生偏差,偏差攻擊開始產(chǎn)生威脅,檢測系統(tǒng)在649 s處報警,檢測時間為8 s;當δ=30時,檢測時間為5 s;當δ=100時,檢測時間為2 s。結(jié)果表明,在上升期改進CUSUM算法對偏差攻擊檢測有效,攻擊幅度越大,檢測越迅速。

圖5 偏差攻擊下的液位曲線(上升期)

圖6 預測值與實際值的差值曲線(上升期)
平穩(wěn)期,罐內(nèi)液位保持在313 mm微小波動,在平穩(wěn)狀態(tài)下,從800 s開始,攻擊者對液位傳感器使用偏差攻擊δ,δ分別為0、5、30、100。偏差攻擊下的液位曲線如圖7所示,偏差攻擊使液位快速下降,攻擊發(fā)動便開始產(chǎn)生威脅,液位將偏離原定的設定值。圖8表示攻擊下實際值與預測值之間的差值曲線,從攻擊產(chǎn)生危害開始,Δk迅速變大,直到Δk=δ。改進CUSUM算法檢測時間見表2。當δ=0時,相當于沒有攻擊,是系統(tǒng)正常狀態(tài),沒有報警;當δ=5時,在800 s實際液位與預測值產(chǎn)生偏差,偏差攻擊開始產(chǎn)生危害,檢測系統(tǒng)在806 s處報警,檢測時間為6 s;當δ=30時,檢測時間為3 s;當δ=100時,檢測時間為2 s。結(jié)果表明,在平穩(wěn)期改進CUSUM算法對偏差攻擊檢測有效,檢測速度快。

表1 偏差攻擊下的報警時間(上升期)

圖7 攻擊下的液位曲線(平穩(wěn)期)

圖8 預測值與實際值的差值曲線(平穩(wěn)期)
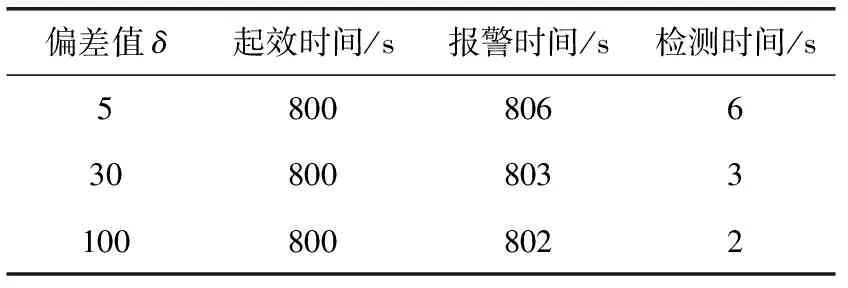
表2 偏差攻擊下的報警時間(平穩(wěn)期)
3.2 幾何攻擊
幾何攻擊具有初始變化緩慢不易偵查,一段時間后幾何式爆發(fā)的特點,對工業(yè)控制系統(tǒng)造成巨大影響。幾何攻擊可以表示為
(11)
n

圖9 幾何攻擊下液位實際值分布
攻擊從10 s開始產(chǎn)生威脅,改進CUSUM在15 s報警,檢測時間為5 s;液位上限報警在19 s觸發(fā),歷時9 s。在幾何攻擊下改進CUSUM算法5 s便能快速做出反應,檢測速度較快。
4 結(jié)束語
工業(yè)控制系統(tǒng)的入侵檢測有高可用性、高實時性的要求。針對工業(yè)控制系統(tǒng)的特點,提出了一種基于改進CUSUM算法的ICS入侵檢測方法。該方法以模型預測值與實際測量值之間的差值作為檢測序列,根據(jù)3σ原則設計偏移常數(shù)β,并決定門限值τ的取值。通過偏差攻擊和幾何攻擊實驗,檢驗改進CUSUM入侵檢測方法性能。實驗結(jié)果表明,改進CUSUM入侵檢測方法檢測時間較短,誤報率低,檢測率高,在工業(yè)控制系統(tǒng)入侵檢測中有實際應用價值。由于β參數(shù)和門限值τ與誤報率、檢測時間、檢測率相互關(guān)聯(lián),進一步優(yōu)化對參數(shù)的選取,是接下來的研究方向。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
測控技術(shù)(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
汽車維護與修理(2015年2期)2015-02-28 12:15:41