基于局部敏感直方圖的魯棒目標跟蹤
2018-11-17 01:47:56米向榮曹建芳
計算機工程與設計 2018年11期
關鍵詞:模型
米向榮,曹建芳
(忻州師范學院 計算機科學與技術系,山西 忻州 034000)
0 引 言
最近提出了大量優秀的跟蹤算法[1],黃清泉等[2]將局部背景信息引入到目標直方圖模型中,提高了復雜情況下的跟蹤性能;顧鑫等[3]利用局部加權直方圖構建目標模型,將目標上下文信息引入到目標直方圖模型中,增強了目標外觀模型的表觀能力;修春波等[4]基于顯著性直方圖的目標跟蹤方法,分別計算目標區域與背景區域的顏色顯著性值,弱化背景干擾,提高跟蹤魯棒性;郭金朋等[5]等將SURF特征與Camshift算法進行融合,對目標模板進行實時在線匹配,解決了復雜背景下相似目標干擾問題;Horst
等[6]提出基于顏色直方圖的干擾感知跟蹤(distractor-aware-tracking,DAT),通過引入干擾感知模型解決復雜場景下的相似目標混淆問題和跟蹤漂移問題,取得了不錯的效果。
然而,上述跟蹤算法都沒能解決劇烈光照變化、情況下的魯棒目標跟蹤問題,本文在DAT算法的基礎上提出基于局部敏感直方圖的魯棒目標跟蹤。通過局部敏感直方圖計算光照不變特征,提高劇烈光照變化情況下的目標外觀模型魯棒性;引入干擾感知模型,將干擾感知模型和顏色概率模型進行加權融合,以此解決復雜背景情況下的目標跟蹤漂移問題;通過尺度自適應策略,解決目標尺度估計問題;最后利用公開數據集[7]測試本文算法性能。
1 干擾感知跟蹤
文獻[6]提出干擾感知跟蹤,其在顏色直方圖跟蹤算法上,引入干擾感知模型,有效降低了復雜情況下的跟蹤漂移問題,提高了跟蹤魯棒性。干擾感知跟蹤主要分為目標顏色概率模型和干擾感知模型,下面對干擾感知跟蹤進行簡單介紹:
為了對目標與背景進行區分,利用貝葉斯分類器對目標像素進行建模,則有
(1)
這里P(x∈O|O,BG,bx)表示像素x屬于目標的概率,O,BG分別表示目標區域、背景區域,Ω表示區域O和BG的集合,P(x∈O)和P(x∈BG)表示像素x屬于區域O和BG區域的概率,P(bx|x∈O)和P(bx|x∈BG)表示區域O和BG中屬于區間bx。
(2)
(3)
這里|·|表示計算區域內像素個數。
則式(1)可以簡化為
(4)
同時為了提高算法在復雜場景下的抗干擾能力,引入干擾感知模型(即目標-擾動概率模型),其定義為
(5)
最終目標聯合概率模型為
P(x∈O|bx)=βP(x∈O,BG,bx)+
(1-β)P(x∈O,S,bx)
(6)
這里β表示模型融合權重因子,這里設置為0.5。然后,計算目標概率似然響應圖有
(7)
這里|W|表示搜索窗口內的像素個數,P(xi,j)表示像素xi,j屬于目標的似然概率。似然響應圖中最大響應所在位置就是目標所在位置。
2 本文算法
為了解決劇烈光照情況下的跟蹤漂移問題,本文提出基于局部敏感直方圖的魯棒目標跟蹤,圖1為本文算法流程。
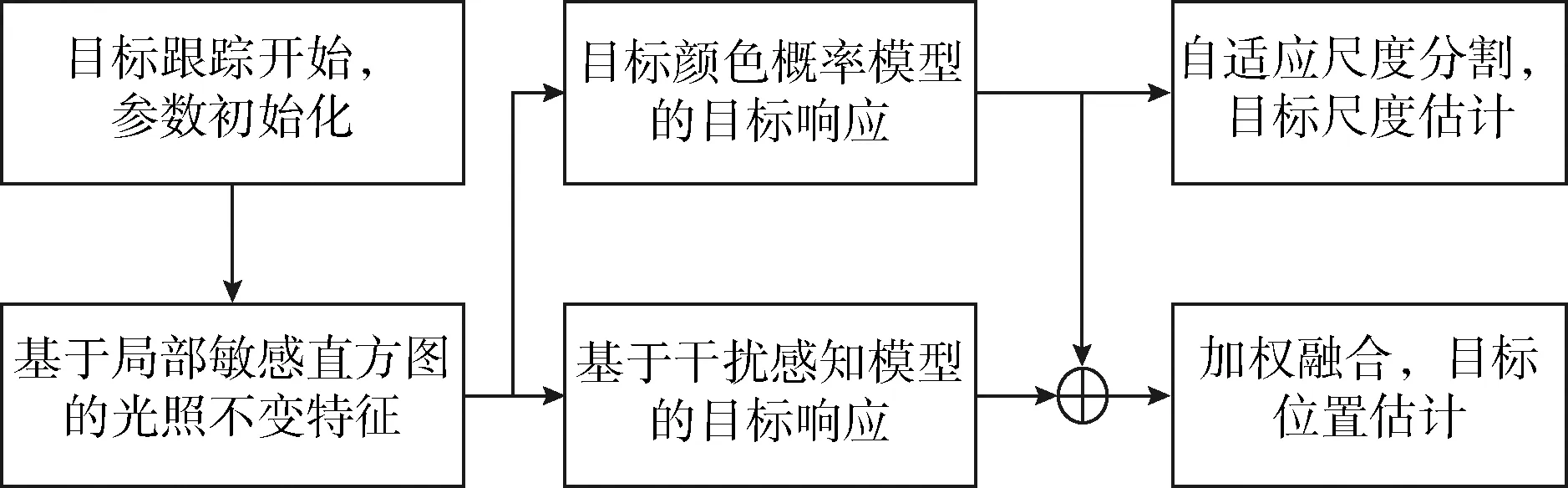
圖1 本文算法流程
2.1 基于局部敏感直方圖的目標跟蹤
傳統的圖像直方圖是統計特定灰度值出現的次數,而局部敏感直方圖[8](local sensitive histogram,LSH)是對一個像素周圍的像素進行統計,計算對應像素點的直方圖,然后通過加權形式計算每個點的直方圖信息。在計算局部敏感直方圖時考慮像素的位置信息,越靠近目標像素中心的像素點權重系數越大
(8)
這里W表示直方圖統計像素個數,α是距離懲罰系數,p與q表示像素位置,B表示灰度級數,Q(Iq,b)用于判別q位置處的像素值Iq是否等于像素b,如果Iq=b則Q=1,否則Q=0。
利用局部敏感直方圖可以計算光照不變特征(illumination invariant feature,IFF),其定義為
(9)
最后通過目標顏色概率模型和干擾感知模型,計算目標聯合概率,最后目標似然概率響應圖為
(10)

2.2 自適應目標尺度變化

(11)

2.3 模型更新
采用線性插值的方法對目標外觀模型更新

(12)

為了保證目標尺度估計的魯棒性,采用線性插值的方法對目標尺度進行更新
(13)

3 實驗結果與分析
本文算法的實驗平臺為VS2013,所有實驗均在intel i7-7700k CPU,主頻4.2 GHZ,內存32 G的PC上進行。本文算法的參數設置為:模型融合權重因子β設置為0.5,常數k為0.1,權重因子α設置為0.5,目標外觀模型學習速率γ為0.1,目標尺度狀態學習速率φ為0.2。
利用8組公開數據集測試本文算法在劇烈光照變化、尺度變化和背景嘈雜等情況下的性能,同時與6種算法進行比較:KCF[9]、LSHT[8]、DAT[6]、Struck[10]、TLD[11]和LOT[12],記錄不同算法的整體精確度圖和成功率圖以及在不同序列上的跟蹤誤差(又叫中心位置誤差)。
中心位置誤差(center location error,CLE):指跟蹤目標真實中心坐標與跟蹤得到的目標位置之間的歐式距離。
精確度圖(precision plot):表示跟蹤目標的CLE小于指定閾值的幀數占跟蹤序列幀數的比例。當閾值取為20時,表示算法的精確度得分。
成功率圖(success plot):表示跟蹤目標窗口與真實目標窗口之間重疊率大于指定閾值的幀數占總幀數的百分比。一般閾值設置為0.5時,獲取算法的成功率得分,但是為了保證算法的魯棒性,這里用成功率曲線下的面積表示算法的成功率。
測試視頻序列屬性,見表1。
3.1 算法實驗結果
3.1.1 劇烈光照變化情況下特征分析
圖2是劇烈光照變化情況下的圖像處理結果。在圖2(a)中顯示弱光和正常情況的圖像,圖2(b)中是經過局部敏感直方圖處理之后的圖像,從處理結果中看出局部敏感直方圖能最大限度地降低光照變化對圖像的影響,說明本文算法利用局部敏感直方圖解決光照變化的方法是有效的。
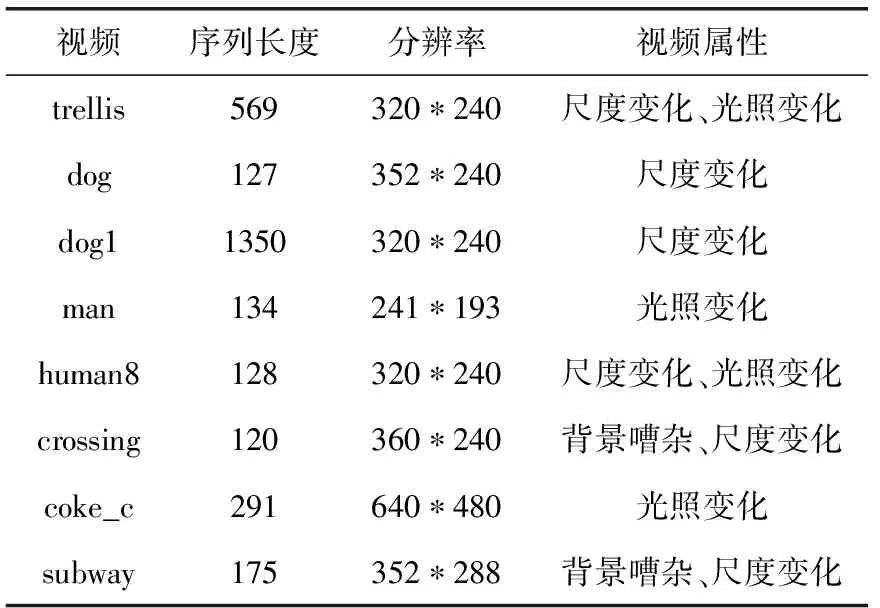
表1 測試視頻序列屬性
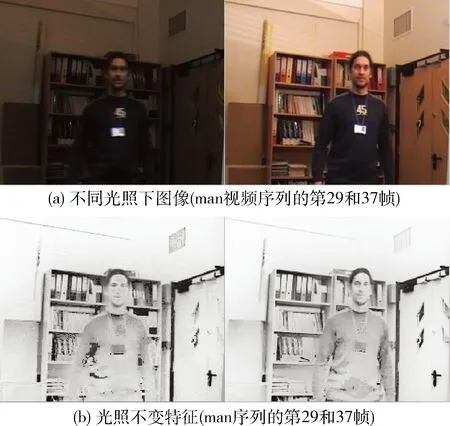
圖2 劇烈光照變化情況下的光照不變特征
3.1.2 不同屬性視頻序列上跟蹤結果分析
劇烈光照變化情況下跟蹤情況分析:圖3為劇烈光照變化情況下7種算法的實際跟蹤情況。在劇烈光照變化情況下,目標外觀模型發生劇烈變化,此時極易出現跟蹤漂移或跟蹤失敗現象。例如,在圖3(b)threllis序列中跟蹤人臉從#166到#311幀,人臉受到劇烈光線照射,面部特征發生劇烈變化,此時跟蹤器容易發生跟蹤失敗。從圖3(b)第#311幀看出只有本文算法、Struck和KCF算法能較為準確的跟指定目標,而其它算法均出現較大的跟蹤漂移,甚至跟蹤失敗,如LOT算法(因為其主要利用的是灰度特征,對光照變化較為敏感,在劇烈光照變化情況下極易跟蹤失敗,而本文算法通過利用局部敏感直方圖構建光照不變特征,極大降低了光照變化的影響)。同時在man、human8和coke_c等序列中,跟蹤目標所受到的主要挑戰是劇烈光照變化。通過圖3中7種算法實際跟蹤情況分析,看出本文算法能很解決劇烈光照變化情況下的跟蹤問題。
尺度變化情況下的跟蹤情況分析:在圖4(a)和圖4(b)中目標外觀模型(大小)發生尺度變化。在目標跟蹤算法中,若目標發生外觀模型的變化,容易造成跟蹤器跟蹤漂移問題,而本文利用自適應尺度分割方法,有效解決了目標尺度變化問題,提高了跟蹤精確性。例如在圖4(a)dog序列中,從第#1到第#91幀,狗發生尺度變化,因為KCF算法與Struck算法不具備尺度估計策略,所以無法解決尺度變化情況下跟蹤漂移問題,降低了跟蹤魯棒性。而在圖4(b)中,目標同樣發生尺度變化,發現雖然DAT算法具有尺度變化策略,但是DAT算法還是發生跟蹤失敗,這是因為DAT算法在灰度圖像上進行跟蹤時,其利用的是單通道的灰度特征,因此效果很差。通過圖4(a)和圖4(b)看出本文算法能很好地解決目標尺度變化問題。

圖3 劇烈光照變化情況下的跟蹤情況
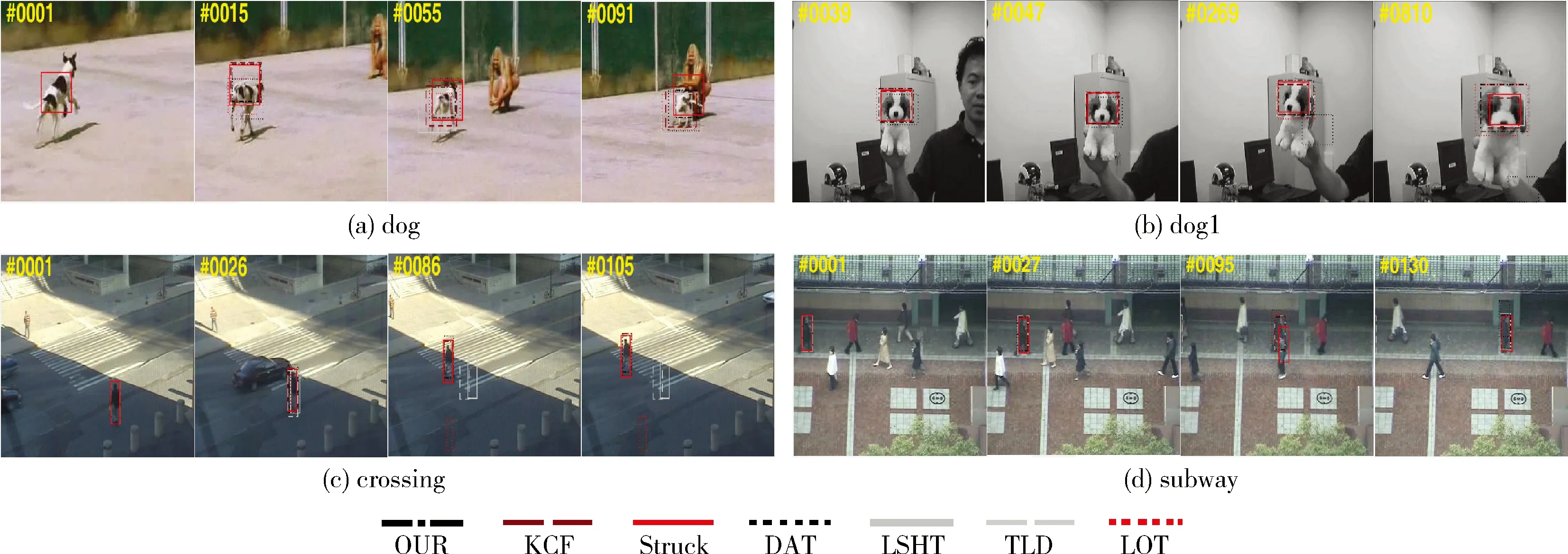
圖4 目標劇烈尺度變化和背景嘈雜情況下的跟蹤情況
背景嘈雜情況下的跟蹤情況分析:在圖4(c)和圖4(d)中跟蹤目標處于復雜的背景中,此時受背景干擾極易發生跟蹤漂移和跟蹤失敗。本文算法因為利用干擾感知模型,因此能很好解決背景嘈雜情況下的目標干擾。例如,在圖4(c)crossing第#26、#86和#105幀,受背景干擾的影響,LOT、TLD和LSHT算法發生跟蹤失敗,而本文算法和DAT因為具有干擾感知模型,因此能很好解決背景嘈雜情況下的跟蹤漂移問題。
為了更好分析本文算法的優缺點,分別記錄本文算法與其它6種算法在測試序列上的整體精確度圖和成功率圖(圖5)。同時,記錄此7種算法在不同視頻序列上的跟蹤誤差(圖6和圖7)。
3.2 算法性能分析
從圖5中看出本文算法的精確度得分和成功率得分分別為0.999和0.721,在7種算法中排名第一,說明本文算法能很好的解決目標光照變化、尺度變化和背景嘈雜情況下的精確目標跟蹤任務。同時測試本文算法在測試序列上的平均速度為21.2FPS,滿足實時性要求。
圖6和圖7記錄7種算法在8個視頻序列上的跟蹤誤差。從coke_c、human8、man和threllis序列上的跟蹤誤差看出,傳統的基于直方圖模型的跟蹤算法(如DAT、LSHT和LOT)對光照變化較敏感,當跟蹤目標受到光照變化的影響,其外觀模型發生劇烈變化,此時極易發生跟蹤漂移,因此跟蹤誤差加大。而本文算法通過利用局部敏感直方圖和干擾感知模型很好解決了問題。在目標發生尺度變化和背景嘈雜的情況下,本文算法的跟蹤誤差均小于DAT和LSHT算法,說明本文算法的尺度估計策略和干擾感知模型時有效的。
4 結束語
針對劇烈光照變化、尺度變化和背景嘈雜問題,提出了一種基于局部敏感直方圖的魯棒目標跟蹤算法,利用局部敏感直方圖構建魯棒的目標顏色概率模型,降低劇烈光照情況下的跟蹤漂移問題,提高跟蹤精度;然后引入直方圖干擾感知模型,通過加權融合的方式獲取目標直方圖概率模型,估計目標位置變化;最后通過自適應尺度估計策略解決目標尺度估計問題。實驗結果表明,本文算法能很好解決復雜情況下的精確目標跟蹤任務,具有一定研究價值。
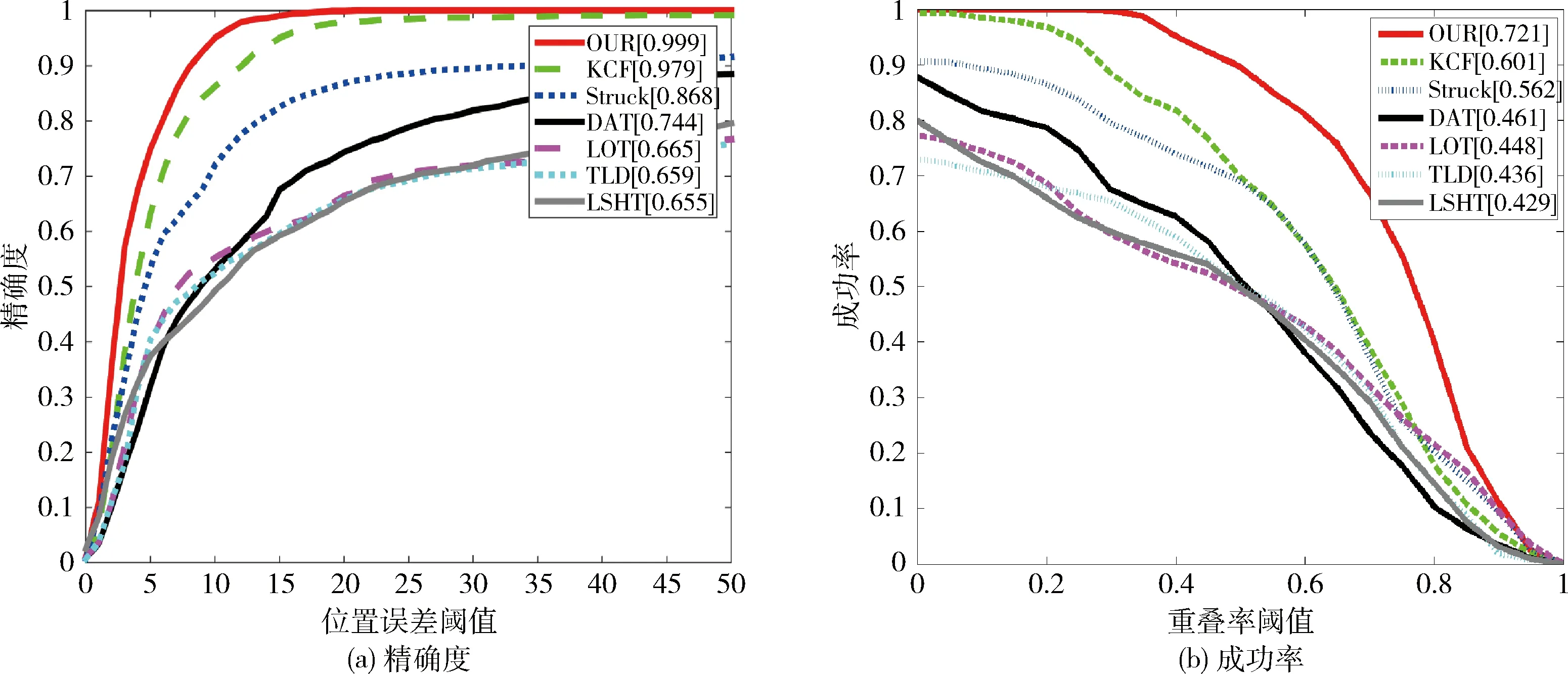
圖5 算法整體跟蹤精確度和成功率

圖6 算法在coke_c,human8,man,threllis序列上的跟蹤誤差情況

圖7 算法在dog,dog1,crossing,subway序列的跟蹤誤差情況
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19