巧妙獲取激光筆光斑坐標的方法
2018-11-21 12:47:24劉東澤
中國科技教育 2018年6期
劉東澤

研究內容
本課題最終制作的激光筆,具有控制電腦鼠標指針跟隨激光光斑移動的功能。激光筆的制作涉及激光筆光斑的坐標識別技術、激光筆的俯仰角及方位角檢測技術、激光筆與電腦的無線通信技術及激光筆在電腦上的控制程序。對于這些內容,只有激光筆光斑的坐標識別技術是本研究的核心內容,也是具有創新的內容。基于此,本論文將只闡述研究的核心內容。
研究過程與方法
計算方法的理論依據
現有獲取激光光斑坐標的方法都需要使用單獨的攝像裝置。為什么不能將攝像裝置直接安裝在激光筆上從而提高易用性呢?經過分析,主要有2個原因:其一,這些方法都要求攝像裝置正對著投影屏幕,并且與投影屏幕間是相對靜止的,而激光筆在使用時與投影屏幕間一定存在相對運動,并且無法保證固定的拍攝方向;其二,如果將攝像裝置安裝在激光筆上,那么在操作激光筆時,攝像裝置必須實時對拍攝圖像進行動態識別,這對圖像處理器件的運算能力要求很高,無論是芯片的處理能力還是芯片需要的功耗都難以在激光筆上實現。
針對當前實現方法的缺陷,提出改進設計。分析如下:可以使用線陣圖像傳感器捕捉激光筆在屏幕上形成的光斑。因為線陣圖像傳感器可以識別圖像的亮度,而且識別方法簡單易實現,可以通過檢測圖像的亮度值分辨出光斑邊界。各種成像方法比較,只有小孔成像沒有聚焦的問題,且易于實現,所以可以考慮將投影屏幕的光線通過小孔成像的方法將光斑成像在線陣傳感器上。本著化繁為簡的原則,先假設激光筆與投影屏幕的位置是固定的,并且垂直于投影屏幕。
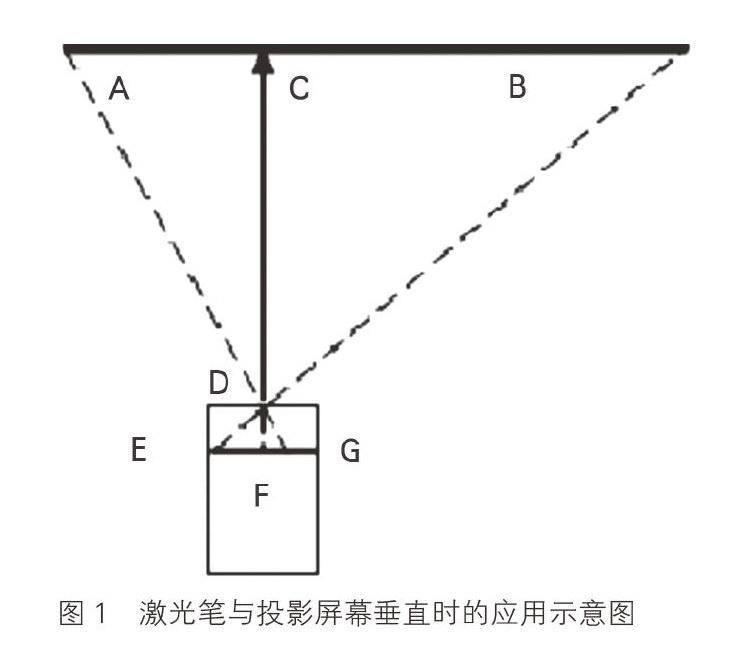
綜合以上分析,在水平方向上,抽象出投影屏幕與激光筆的應用示意圖,如圖1所示。在圖1中,矩形是激光筆的外殼。激光筆內的粗線是線陣傳感器。激光筆的激光從D點發出,照射到端點為A和B的投影屏幕上,交于C點。投影屏幕的端點A和B的光線經過小孔D照射到線陣傳感器上,形成的像分別為G和E點。激光發射線DC的反向延長線,交線陣傳感器于F點。因為線陣傳感器與投影屏幕平行,所以△ABD與△EGD是相似三角形,故可推導出AC/AB FG/EG。因為線陣傳感器的像素數量及每個像素的尺寸是確定的,通過分析線陣傳感器上像的編號即可計算出EF和FG的長度。這樣,就可以計算出C點在投影屏幕AB上水平方向的相對位置。
實際上,激光筆與投影屏幕不可能總是垂直的關系,會有一定的夾角,比如激光筆從左向右或從右向左指向投影屏幕。分析這2種情況可知(推導略),激光筆與投影屏幕任意夾角時,也都可以得到激光光斑的相對坐標值。
綜上,在水平方向上將激光筆與投影屏幕抽象成數學上的幾何關系,可以計算出激光光斑在投影屏幕上的水平和相對垂直方向上的位置。另外,在上述推導過程中,所有使用到的參數都與激光筆到投影屏幕的距離無關。這說明該計算方法完全適用于激光筆在投影屏幕前任意角度、任意距離的情況。
激光筆成像小孔的設計
線陣傳感器能否識別投影屏幕的光通過小孔成的像,是研究的關鍵。首先是必須保證通過小孔的光能夠正常成像;其次必須保證線陣圖像傳感器能夠正確識別圖像的邊界。
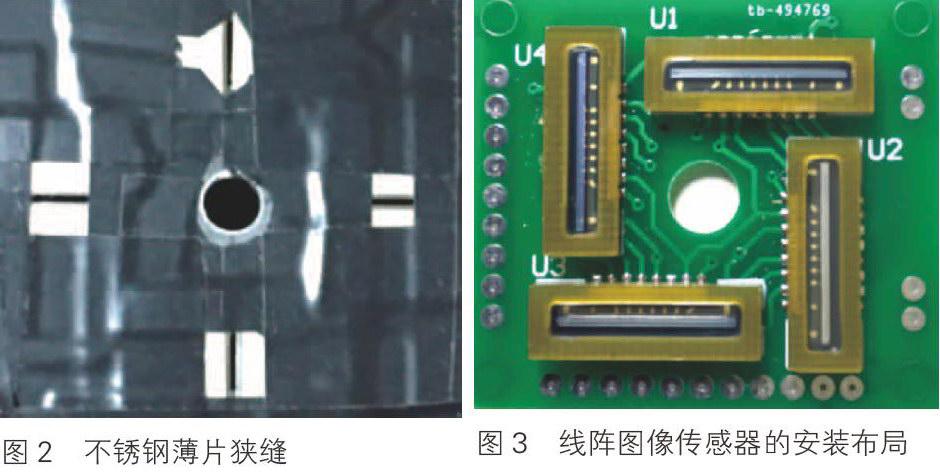
小孔的選擇經歷了多次實驗。實驗結果表明,用不銹鋼薄刀片制作的、寬度為0.5mm矩形狹縫(見圖2)成像效果較好。
狹縫的寬度在0.4~0.6mm之間的效果差別不大。狹縫寬度過小,通過狹縫進入線陣傳感器的光線強度變弱,圖像的邊界會變得模糊,使光斑位置檢測的精確度下降,同時產生抖動。狹縫寬度過大,線陣傳感器上圖像的邊界與真實的邊界對應關系將變差,同樣會使光斑位置檢測的精確度下降。
線陣圖像傳感器及其驅動
線陣圖像傳感器選擇的是東芝公司的TCD1254,共使用了4片。該傳感器有效像素2500個,感光面長度13.13mm。4片TCD1254的安裝布局如圖3所示。水平2傳感器用于識別投影屏幕的水平邊界,垂直2傳感器用于識別投影屏幕的垂直邊界。
帶有狹縫的板子安裝在線陣圖像傳感器感光面上,與傳感器間的距離為5mm。線陣圖像傳感器的工作需要一系列滿足特定時序要求的脈沖信號。φM是TCD1254工作的主時鐘,典型頻率是1 MHz。OS是傳感器輸出的模擬圖像信號。SH和ICG是2個輸入信號,需要滿足特定的時序,才能保證在OS引腳輸出正確的圖像信號。這幾個信號需要由外部驅動電路提供。
綜合考慮,選擇單片機生成線陣傳感器驅動信號最為適合。通過使用單片機提供的定時器時鐘輸出功能,可以得到穩定的1MHz的方波信號,用它作為φM信號。通過單片機的計數功能對φM信號進行計數,并輔以一定的邏輯處理,就可以獲得需要的SH和ICG信號。
將STC15L104W輸出的φM、SH及ICG信號連接至4個線陣圖像傳感器的相應引腳。4個線陣圖像傳感器的OS信號輸出端通過跟隨器,進入主控單片機的模數轉換引腳。由單片機將這4個模擬圖像信號轉換為數字量,并存儲在單片機的內容RAM中。然后,單片機根據前述的計算方法計算出激光光斑的坐標,進而將坐標值傳送給電腦。電腦上的應用程序根據激光光斑的坐標控制鼠標的移動。
結果及分析
激光筆的核心器件是線陣圖像傳感器,而φM、SH及ICG信號的時序關系是保證線陣圖像傳感器正常工作的前提。與TCD1254產品手冊要求的時序信號對比,關鍵的切換點都符合要求。在時序信號的驅動下,線陣傳感器可以正常工作,并在激光筆指向投影屏幕不同位置時,輸出期望的波形。
為了驗證單片機模數轉換后得到數據的正確性,在單片機中編寫了診斷輸出程序,用于將圖像的數字量信號輸出給電腦進行分析。在上述波形輸出下,將單片機輸出的數字量數值通過Excel繪制成的曲線圖再與示波器顯示波形進行對比,可以發現二者完全是對應的。這說明單片機正確獲取了投影屏幕圖像的數字量。
為了了解實際制作的激光筆獲取激光光斑坐標的效果,進行了如下測試。
將電腦桌面墻紙設置為含有100個格子的圖片。然后將激光筆置于電腦屏幕前方大約30cm處,保持激光筆與屏幕的夾角在±30°以內。移動激光筆,讓光斑呈蛇形照遍這100個格子,使用攝像機記錄下整個過程。
測試結果表明,激光光斑在相鄰格子之間移動時,鼠標指針跟隨的延遲時間大約在100ms以內。激光光斑快速從最左端移動到最右端,延遲時間不超過500 ms。這樣的延遲時間,對于普通PPT演示的操作,基本不會造成太大的影響。
鼠標指針跟隨激光光斑的精度基本能控制在1個格子內。這表示任何時刻,當激光光斑穩定時,鼠標指針和激光光斑問的最大距離都小于1個格子的對角線長度。
討論
關于線陣圖像傳感器的可變積分時間的設置,需要根據實際情況動態設置。可變積分時間設置得過小,線陣圖像傳感器將檢測不到投影屏幕像的邊界。設置得過大,則線陣圖像傳感器將出現光飽和現象。正確的積分時間下,OS的輸出波形應該具有一定的變化幅值(0.5V以上),同時波形不會出現底部平坦的情況。
當投影屏幕的光線以較大傾角通過小孔成像在線陣傳感器上時,光線的強度較弱,表現在波形上就是波形的上升沿不夠陡峭,這給邊界識別帶來一定的難度。現在的做法是首先獲取大量的數據,然后分析出最可能的臨界值。
激光筆在實際運行時,單片機連續取5個圖像數值,然后判斷其平均值是否大于臨界值。如果大于臨界值,則認為上升沿出現,找到圖像的邊界值。激光筆樣機見圖4。
結論
本論文提出了一種全新的在投影屏幕上獲取激光光斑坐標的方法。該方法以光學及數學理論為依據,經過嚴密的數學推導得出。使用該方法制作的激光筆樣機,經實際測試完全能夠實現電腦上的鼠標指針跟隨激光筆光斑的坐標進行同步移動。鼠標指針跟隨激光筆光斑移動的跟隨時間在100ms左右,跟隨精度完全可以滿足一般的PPT演示需要。
由于該激光筆是通過獲取投影屏幕的邊界,而不是激光點光斑計算激光光斑位置的,所以該激光筆工作時,完全可以關閉激光發射,對激光筆的正常使用沒有任何影響。這使它非常適合某些不允許發射激光的特殊場合。
目前對于投影屏幕不同的亮度,需要手動調整線陣傳感器的光積分時間以得到最佳的識別效果。后續將研究通過光敏器件自動調節光積分時間。另外,對于激光筆方位角的檢測還沒有找到性價比較高并且數值準確的解決方案,還在繼續探索中。此外,激光筆在使用時,不允許激光筆本體有左右翻滾的情況,否則識別精度將大大下降,這是后續設計要改進的地方。
該項目獲得第32屆全國青少年科技創新大賽創新成果競賽項目中學組工程學一等獎。
專家評語
該項目制作的激光筆可直接獲取光斑的位置信息,并實時傳遞給計算機,方法簡便、快捷、準確、成本低,具有較好的使用價值與良好的市場前景。以圖像傳感器獲取屏幕的邊界并經理論計算獲取光斑的坐標值,進而通過無線方式傳遞信號控制計算機動作,方法上為首次提出,無申報專利。當投影邊界不清晰時,存在邊界不能識別或識別不清的可能,建議進一步改進程序,增加圖像復雜邊界的處理能力。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00