圖像測距技術在調車作業中的應用
2018-12-01 07:04:56陳文軒
鐵路計算機應用 2018年11期
陳文軒
(蘭州交通大學 機電技術研究所,蘭州 730070)
調車作業是鐵路車站行車組織中的關鍵環節,其主要工作包括解體、編組、取送及摘掛機車等。調車作業具有作業次數頻繁,環節復雜,時間長,范圍廣,作業人員多以及全天候等特點[1]。其中,在摘掛機車作業時,目前,主要依靠作業人員瞭望來確認機車和車廂之間的距離。不僅加重了作業人員的工作強度,受天氣因素影響較大,而且可能由于作業人員視覺疲勞、疏忽等因素引起調車事故發生。面對復雜的作業環境和危險的作業環節,如何提高作業人員的安全和效率,減少工作量具有很大的研究價值[2]。目前,在調車作業安全方面主要涉及管理方法和作業技術,在作業技術方面,對于無線調車機車信號與監控系統的研究已取得較深入的研究成果,但其涵蓋范圍較廣,針對整車站的機車信號監控,無法實時監控和測量調車作業過程中的運行過程與距離。利用計算機視覺技術代替人工瞭望判斷距離的工作,實現機車和車廂摘掛過程中的智能測距將填補機車信號監控系統中對于距離測量的空白[3-4]。
本文基于機器視覺,設計了調車在摘掛作業過程中的圖像測距系統。通過安裝于機車尾部的攝像頭采集實時視頻信息[5],使用圖像測距技術,將機車尾部和車廂之間的實時視頻信息和距離顯示在司機室的屏幕上,系統上設置特定距離的報警程序。系統實現了智能測距的目的,能夠降低作業人員的工作強度和事故發生率。
1 圖像測距系統設計與工作原理
1.1 圖像測距系統配置
圖像測距系統總體結構,如圖1所示。視頻圖像信息采集裝置由CCD攝像機、光照裝置組成,可實現全天候的圖像信息采集工作。

圖1 圖像測距系統總體結構
圖像測距系統流程圖,如圖2所示,圖像處理與測距系統使用C++語言,使用改進的SIFT算法,配置環境為OpenCV2.4.9與Visual Studio2012,系統軟件功能包括初始化系統配置、讀取攝像頭并獲取圖像、檢測圖像是否可用、圖像匹配并計算坐標值得出目標的距離信息。視頻圖像與距離信息顯示裝置由可視化的程序界面組成,在司機室上位機界面上可實現實時視頻、測距結果與警戒報警距離等信息的顯示。
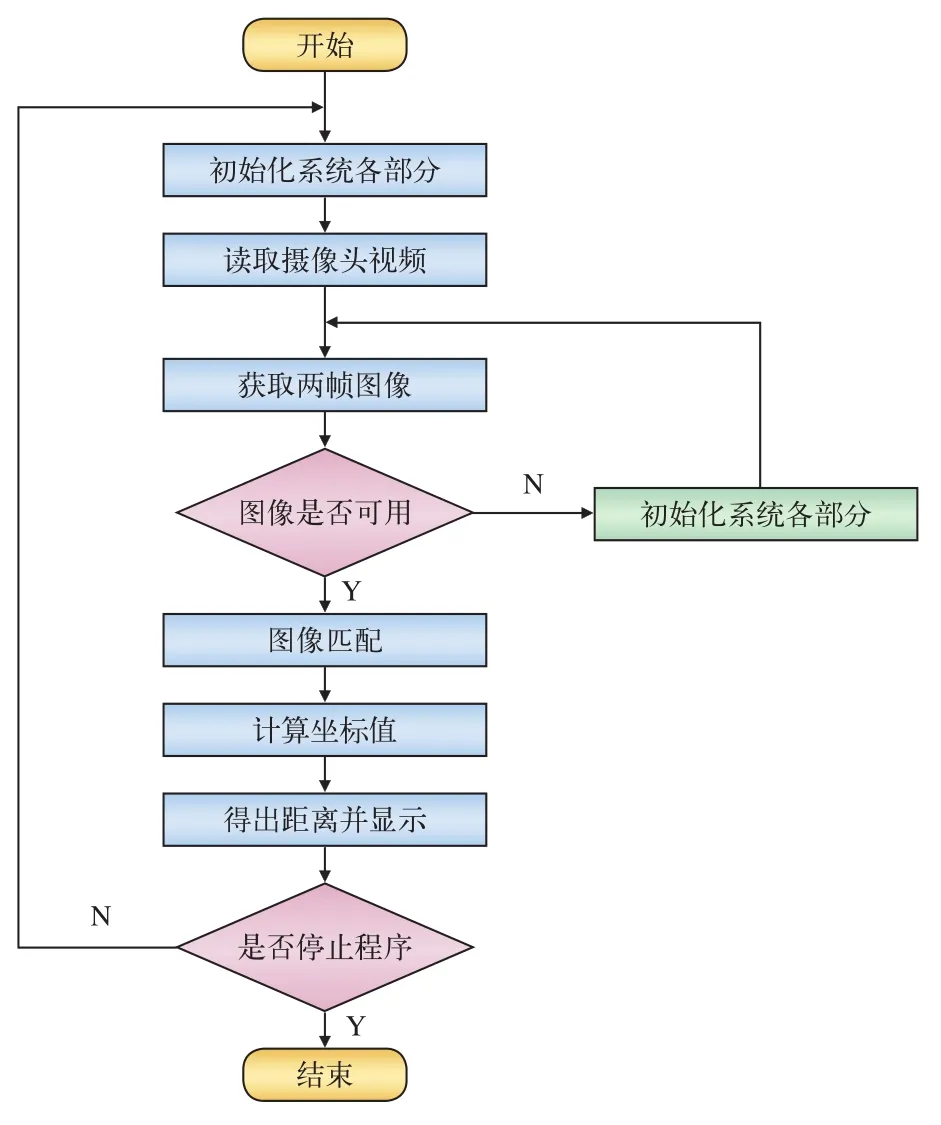
圖2 圖像測距系統流程圖
1.2 圖像測距系統工作原理
1.2.1 攝像機標定與測距技術
本文使用針孔成像模型,其坐標系統由世界坐標系、圖像物理坐標系、圖像像素坐標系與攝像機坐標系組成。如圖3所示,世界坐標系(Xw, Yw, Zw)描述攝像機和車廂的位置。圖像物理坐標系xO1y中,O1為攝像機光軸與圖像平面的交點,(x, y)為物理單位度量下平面坐標系坐標。圖像像素坐標系uO0ν中,圖像信息保存在m·n的數組中,表示為像素坐標(u, v)。攝像機坐標系(Xc, Yc, Zc)的Oc點為攝像機的位置,Zc軸為光軸,其穿過中心O1且垂直于xO1y 平面[6-7]。
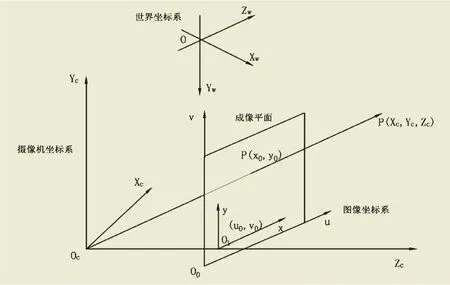
圖3 坐標系
OcO1為攝像機焦距f,平移向量T與旋轉矩陣R表示攝像機坐標系與世界坐標系的關系,空間某點P在兩坐標系下的齊次坐標為(Xc, Yc, Z, 1)T與(Xw,Yw, Zw, 1)T,存在如下關系[8-9]:
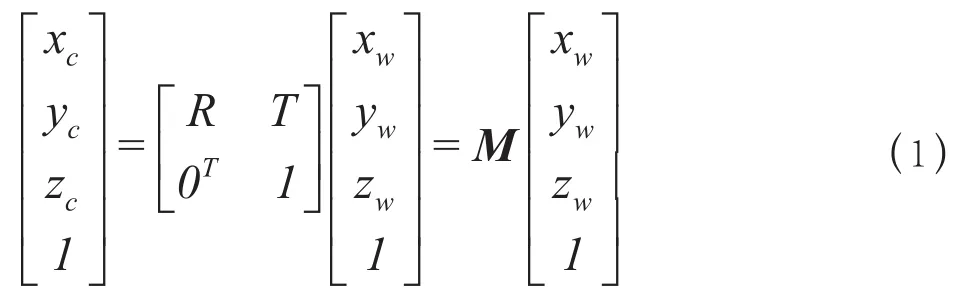
式中,R為3×3的正交單位矩陣,T為三維平移向量,矢量0=(0, 0, 0),M為4×4的矩陣,R與T為攝像機的外部參數[10]。
某點P在攝像機坐標系與圖像坐標系的轉換關系為:
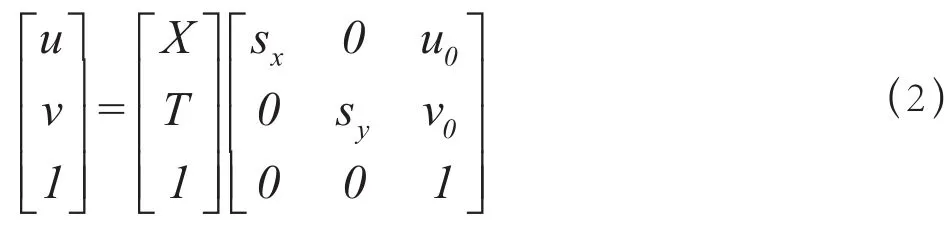
式中,sx=1?dx,sy=1?dy為X與Y方向上單位長度的像素數。可得:

式中,fx, fy, u0, v0為攝像機內部參數。
選取兩幀圖像,運用改進的SIFT算法[11-12]尋找特征點,計算特征點的三維坐標。將攝像機坐標系與世界坐標系重合,建立攝像機坐標系XOYZ,平面XOY與平面X′O′Y′為移動前后選取的兩幀圖像,光心OO′距離為D。
成像圖,如圖4所示[13]。
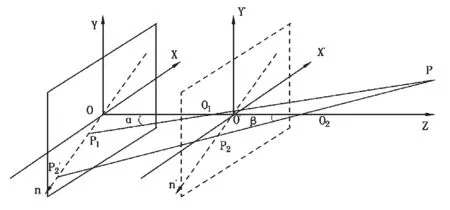
圖4 成像圖
選取特征點P,兩次成像為P1與P2,分別在斜率相同的直線 On,O′ n′上,延長 PP2交 On于 P′2,得出OO1=O′O2=f。R1與R2為像點P1與P2到光心的距離,通過特征點的匹配,可確定R1,R2的值,由此可得α,β,三角形PO1O2,POO1可得點P在攝像機坐標系OXYZ內的坐標為:
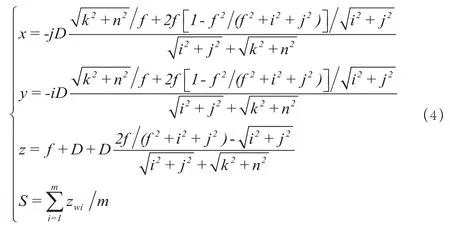
其中,(i, j)、(k, n)為 P1、P2的坐標 ,f為焦距,D為移動距離,S為圖像測距結果。
運用上述測距技術與圖像處理技術,經過C++編程,可實現調車作業中距離的測量[14]。
1.2.2 圖像測距系統工作原理
通過以上對攝像機參數的標定,如圖5所示,在機車運行至車廂的過程中,安裝于機車尾部的攝像機采集機車與車廂之間的實時畫面,并顯示在司機室的上位機界面。將采集到的幀圖像,經過圖像處理與圖像匹配算法[15],得到特定的圖像,利用定焦平移系列圖像的測距技術,測得機車與車廂之間動態實時距離,并顯示在司機室上位機界面。此外,系統可設定距離報警值,方便司機工作[16]。
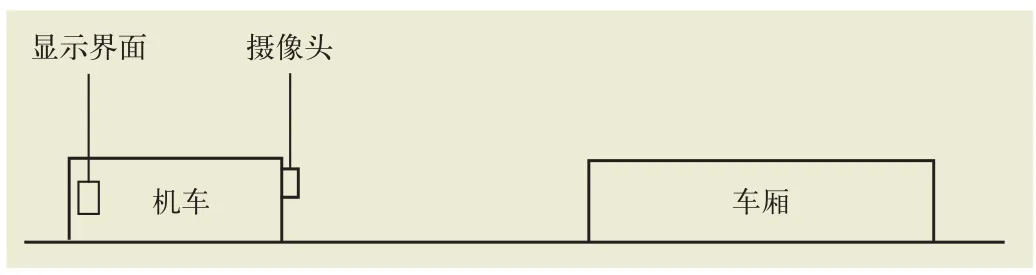
圖5 圖像測距系統示意圖
2 圖像測距系統在調車作業中的應用
在實際場景中,實驗使用佳能7D,焦距f=25 mm,分辨率為1 280×720,攝像機初始真實距離設為5 m,選取第1幀畸變較小的圖像,向前移動0.1 m,選取第2幀圖像,經過圖像處理與匹配,選取10個匹配點,計算其在世界坐標系中的Zwi坐標,可得測距結果[17-18],如表1所示。
圖像測距系統程序運行界面,如圖6所示。
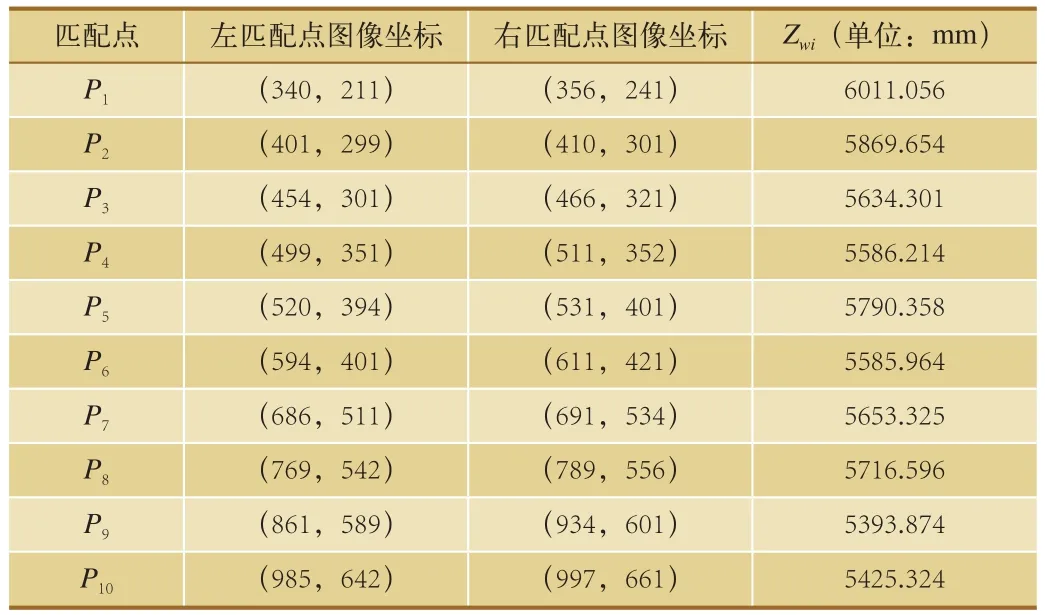
表1 實驗結果

圖6 圖像測距系統運行結果圖
3 結束語
本文針對調車作業中由人工瞭望判斷機車與車廂的距離而產生的安全事故與低效率問題,設計了一種測距系統。通過攝像機采集實時視頻信息,使用SIFT特征視頻圖像匹配算法與定焦平移系列圖像的測距技術,設計出圖像測距系統,并在實際場景中驗證,達到了較理想的結果,實現了智能測距的目的,能夠降低作業人員的工作強度和事故發生率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08