基于復(fù)合校正的主動桿執(zhí)行機(jī)構(gòu)控制策略研究
2018-12-06 02:26:38賈會棟段富海杜東偉
機(jī)電工程技術(shù) 2018年10期
賈會棟,段富海,※,杜東偉
(1.大連理工大學(xué)機(jī)械工程學(xué)院,遼寧大連 116023;2.航空工業(yè)蘭州萬里航空機(jī)電有限責(zé)任公司,甘肅蘭州 730070)
0 引言
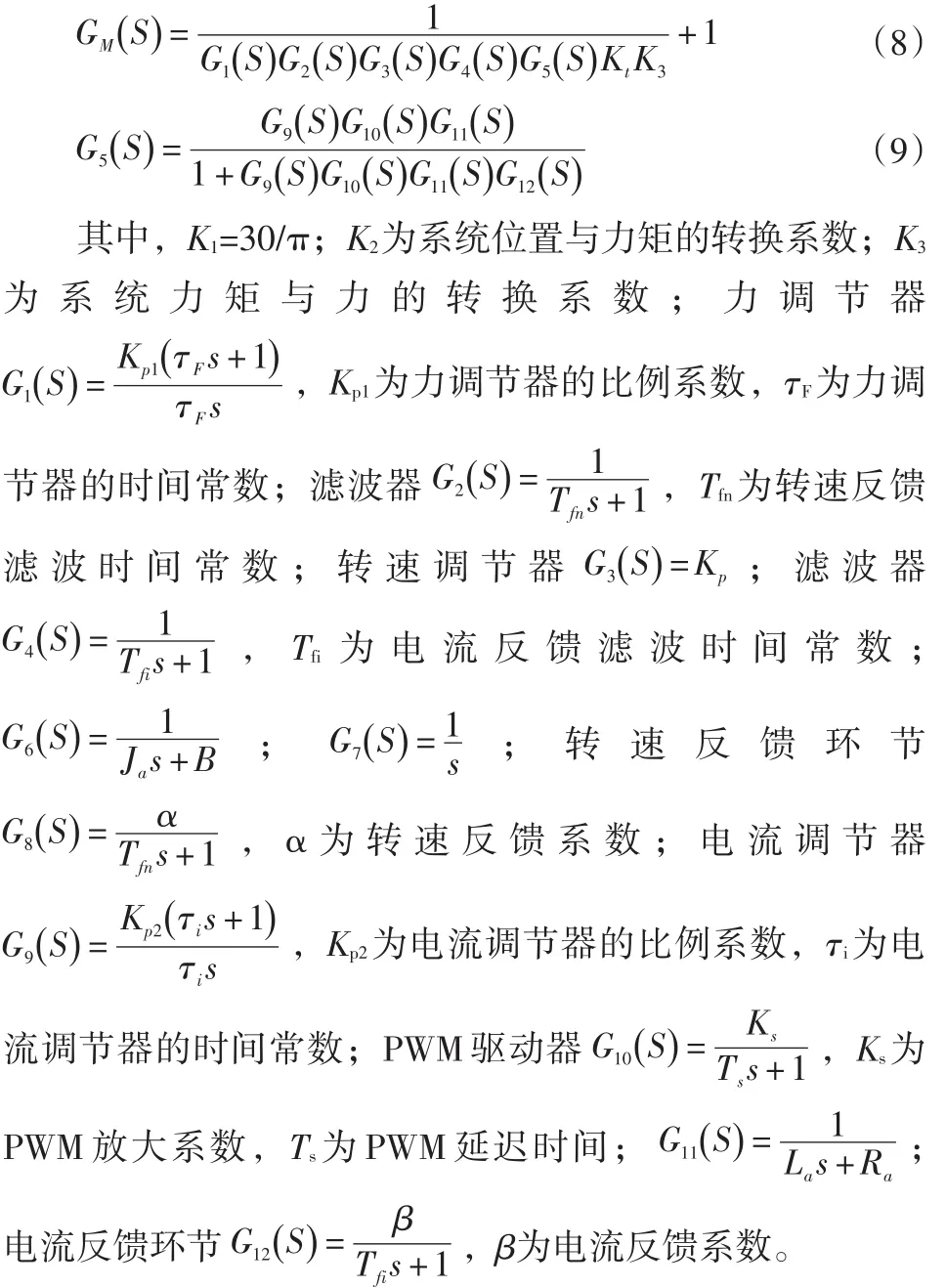
飛機(jī)主動桿駕駛裝置的一個重要功能是作為“人感系統(tǒng)”向飛行員提供操縱力感覺[1-2]。主動桿裝置的執(zhí)行機(jī)構(gòu)是影響側(cè)桿操縱品質(zhì)與操縱精度的重要部件[3],它主要有兩個作用:一是在飛機(jī)自動駕駛模式下拖動駕駛桿手柄旋轉(zhuǎn);二是在駕駛員主動駕駛模式下給出操縱指令,并給駕駛員提供反饋力。在主動桿裝置中,俯仰方向與橫滾方向需要分別使用一套執(zhí)行機(jī)構(gòu),但由于主動桿的體積與重量都受限,所以在主動桿機(jī)械結(jié)構(gòu)設(shè)計以及器件的選取時要注意小體積化與輕量化。力矩電機(jī)可以直接拖動負(fù)載運(yùn)行,長時間工作在堵轉(zhuǎn)狀態(tài),并且具有結(jié)構(gòu)緊湊、響應(yīng)快、精度高、機(jī)械特性好、運(yùn)行可靠和維護(hù)方便等優(yōu)點(diǎn)[4]。為了縮小主動桿裝置的體積與重量、減少機(jī)械連接裝置,同時提高力加載性能,本文選用永磁直流無刷力矩電機(jī)作為主動桿的執(zhí)行機(jī)構(gòu)。
在駕駛員主動駕駛模式下,對飛機(jī)主動桿執(zhí)行機(jī)構(gòu)的控制過程,也即實(shí)現(xiàn)“人感系統(tǒng)”對駕駛員的力加載過程。若要保證飛機(jī)的操縱品質(zhì),就需要保證力加載系統(tǒng)對駕駛員的操縱力有較高的動態(tài)跟蹤精度[5-7]。本文以俯仰方向的力矩電機(jī)控制為例,設(shè)計了基于“電流、轉(zhuǎn)速雙內(nèi)閉環(huán)+力外環(huán)”的力加載三閉環(huán)控制系統(tǒng)的復(fù)合校正系統(tǒng),以此來實(shí)現(xiàn)高跟蹤精度的力加載。
1 力加載控制系統(tǒng)設(shè)計
主動桿裝置包括機(jī)械結(jié)構(gòu)和控制系統(tǒng)兩部分。簡單可靠的機(jī)械結(jié)構(gòu)是實(shí)現(xiàn)主動桿功能的基礎(chǔ)保障,在完成機(jī)械結(jié)構(gòu)設(shè)計的基礎(chǔ)上,需要設(shè)計科學(xué)合理的控制系統(tǒng)才能有效發(fā)揮主動桿裝置的功能。
本文所設(shè)計的力加載控制系統(tǒng)原理框圖如圖1所示。駕駛員向前推或向后拉駕駛桿手柄時,傳感器采集手柄移動位移,并將采集的信號輸出到飛控計算機(jī),飛控計算機(jī)根據(jù)飛機(jī)當(dāng)前狀態(tài)以及傳感器采集的各信號,計算出手柄處在該位置時駕駛員應(yīng)受到的力,同時控制器根據(jù)傳感器采集的各類信號,計算出相應(yīng)的控制信號以控制俯仰方向力矩電機(jī)的運(yùn)動,進(jìn)而給駕駛員提供反饋力,形成觸感,完成力加載過程。
為保證力加載系統(tǒng)的響應(yīng)速度和跟蹤精度,設(shè)置三個調(diào)節(jié)器:力調(diào)節(jié)器AFR、轉(zhuǎn)速調(diào)節(jié)器ASR和電流調(diào)節(jié)器ACR,分別調(diào)節(jié)力、速度和電流。F*為飛控計算機(jī)輸出的駕駛員應(yīng)受到的力,F(xiàn)為力矩電機(jī)通過減速機(jī)構(gòu)反饋給駕駛員的力。力調(diào)節(jié)器的輸出Un*作為轉(zhuǎn)速環(huán)的給定,轉(zhuǎn)速調(diào)節(jié)器的輸出Ui*作為電流環(huán)的給定,電流調(diào)節(jié)器輸出PWM驅(qū)動器的控制電壓Uct,PWM驅(qū)動器輸出電機(jī)電樞電壓Ud。電流調(diào)節(jié)器與力調(diào)節(jié)器均采用比例積分調(diào)節(jié)器,轉(zhuǎn)速調(diào)節(jié)器采用比例調(diào)節(jié)器。
2 力加載控制系統(tǒng)的數(shù)學(xué)模型
2.1 力矩電機(jī)的數(shù)學(xué)模型
本文選用的三相永磁直流無刷力矩電機(jī),采用定子繞組星型連接,兩兩通電的模式,利用PWM驅(qū)動裝置將電路傳來的直流電壓轉(zhuǎn)換為電機(jī)繞組的三相電壓,從而控制力矩電機(jī)的輸出轉(zhuǎn)矩。在兩兩導(dǎo)通的狀態(tài)下,永磁直流無刷力矩電機(jī)可以等效為有刷直流力矩電機(jī)。以任意兩相繞組導(dǎo)通為例,建立永磁直流無刷力矩電機(jī)的傳遞函數(shù)模型。
電壓平衡方程為:

式中,Ud:電樞電壓;Ra:電樞回路總電阻;Ia:電樞電流;La:電樞回路等效電感;E:電樞感應(yīng)電勢;Ke:反電動勢系數(shù);ω:理想空載轉(zhuǎn)速。
電磁轉(zhuǎn)矩可表示為:

式中,Te:電磁轉(zhuǎn)矩;Kt:電機(jī)的轉(zhuǎn)矩系數(shù)。電機(jī)轉(zhuǎn)矩平衡方程:

式中,Tl:負(fù)載轉(zhuǎn)矩;Ja:電機(jī)電樞的轉(zhuǎn)動慣量;B:粘性阻尼系數(shù)。
2.2 力加載控制系統(tǒng)的數(shù)學(xué)模型
由于電流調(diào)節(jié)過程比轉(zhuǎn)速調(diào)節(jié)過程要快得多,因此在進(jìn)行相應(yīng)的設(shè)計時可以忽略電動機(jī)反電動勢的影響[8]。根據(jù)前面力加載控制系統(tǒng)的原理框圖以及力矩電機(jī)的數(shù)學(xué)模型,力加載三閉環(huán)控制系統(tǒng)的動態(tài)結(jié)構(gòu)框圖如圖2所示。圖中θf為擾動量。
由方框圖可以得到力矩電機(jī)的輸出力為:
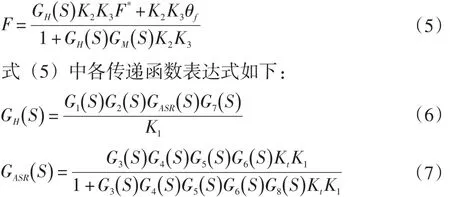

圖1 力加載控制系統(tǒng)原理框圖Fig.1 Principleblock diagramof forceloadingcontrol system

圖2 力加載三閉環(huán)控制系統(tǒng)動態(tài)結(jié)構(gòu)框圖Fig.2 Dynamic structureblock diagramof forceloadingthreeclosed loop control system
2.3 多余力問題
主動桿的力加載系統(tǒng)執(zhí)行機(jī)構(gòu)是力矩電機(jī),被加載對象是駕駛員的手。在駕駛員操縱駕駛桿的動態(tài)力加載過程中,被加載對象做主動運(yùn)動,力矩電機(jī)被迫跟隨被加載對象運(yùn)動,同時對被加載對象進(jìn)行力加載,在力矩電機(jī)受迫運(yùn)動過程中,由于電磁感應(yīng)的作用,力矩電機(jī)的電樞中會產(chǎn)生反電動勢,從而影響電樞電壓的大小,最終導(dǎo)致力矩電機(jī)的輸出力中產(chǎn)生多余力[9-10]。所以對于力加載系統(tǒng)來說,動態(tài)力加載時,駕駛員的操縱力是一個很強(qiáng)的擾動。除了駕駛員的操縱外,多余力也可能由飛機(jī)自身的控制規(guī)律或受到強(qiáng)烈振動導(dǎo)致力矩電機(jī)的角位移變化等因素引起。
由式(5)可知,當(dāng)駕駛員操縱力F*=0時,力矩電機(jī)的輸出力為:

這部分力就是多余力,多余力的存在將會嚴(yán)重影響力加載系統(tǒng)的輸出,甚至?xí)沟昧虞d系統(tǒng)無法進(jìn)行力加載。所以需要采用適當(dāng)?shù)目刂撇呗裕M量減小多余力對系統(tǒng)的影響,從而保證力加載系統(tǒng)的跟蹤精度,增強(qiáng)系統(tǒng)的抗干擾性。
3 按擾動補(bǔ)償?shù)膹?fù)合校正
按擾動補(bǔ)償?shù)膹?fù)合矯正系統(tǒng)如圖3所示,圖中θf為擾動量,GH(S)、K2和K3為反饋部分的前向通路傳遞函數(shù),GM(S)為反饋環(huán)節(jié)的傳遞函數(shù),GN(S)為前向補(bǔ)償裝置傳遞函數(shù)。
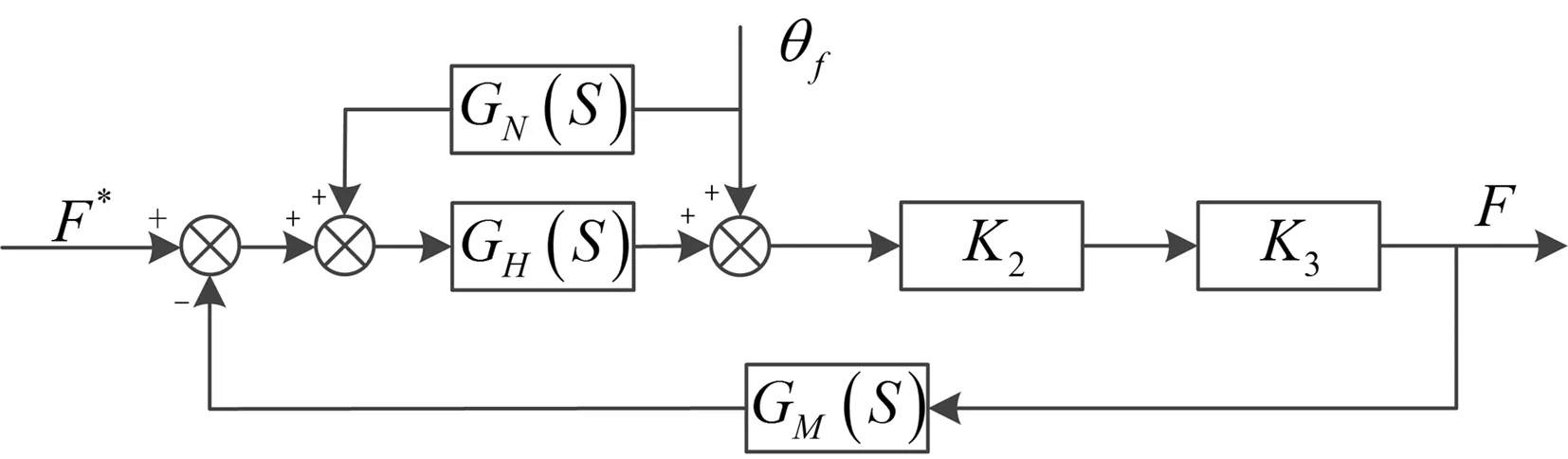
圖3 按擾動補(bǔ)償?shù)膹?fù)合矯正系統(tǒng)Fig.3 Compound correction systembased on disturbancecompensation
式(12)即為對擾動進(jìn)行全補(bǔ)償?shù)臈l件。但由式(6)可知,GH(S)的分子多項(xiàng)式階次總是小于或等于分母多項(xiàng)式階次,所以式(12)的分子多項(xiàng)式階次總是大于或等于分母多項(xiàng)式階次,這使得無法在物理上實(shí)現(xiàn)全補(bǔ)償[11]。本文在對系統(tǒng)性能起主要影響的頻段內(nèi)采用近似全補(bǔ)償?shù)姆椒ǎ骨梆佈a(bǔ)償裝置易于物理實(shí)現(xiàn)。對系統(tǒng)進(jìn)行補(bǔ)償后,多余力即可得到有效抑制。
4 仿真分析
為驗(yàn)證復(fù)合校正系統(tǒng)的有效性、魯棒性、響應(yīng)速度以及力跟蹤性能,本文在Simulink仿真平臺中對三閉環(huán)控制系統(tǒng)和復(fù)合校正系統(tǒng)進(jìn)行了仿真,并將仿真結(jié)果進(jìn)行分析對比。
(1)三閉環(huán)控制系統(tǒng)
駕駛員輸入力為100 N,無擾動條件下系統(tǒng)仿真圖如圖4所示。

圖4 有輸入無擾動時三閉環(huán)控制系統(tǒng)仿真Fig.4 Simulation of threeclosed loop control system
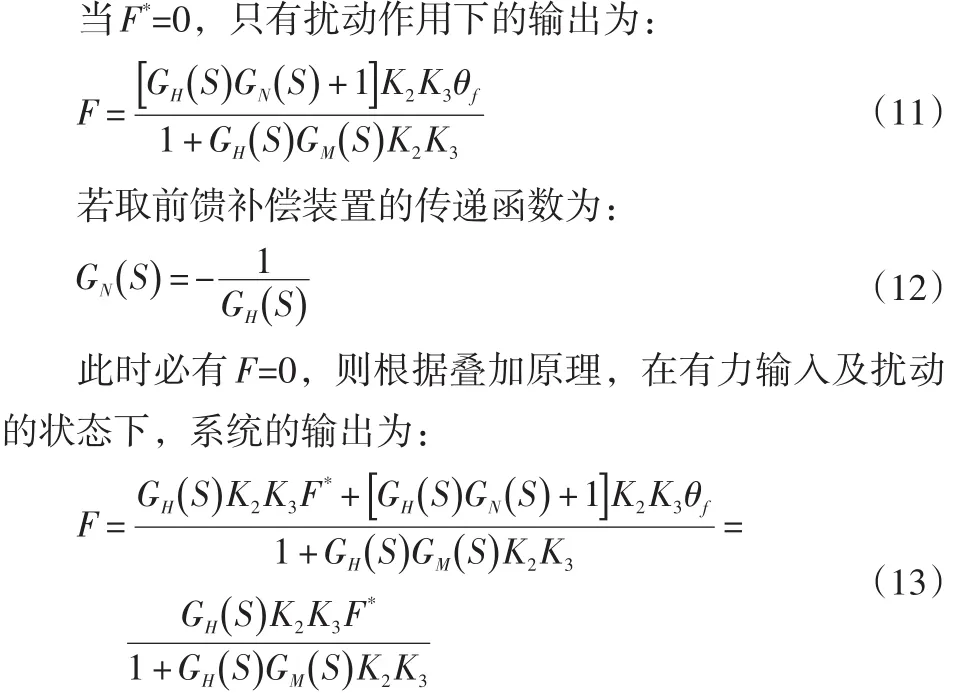
駕駛員輸入力為零,加入幅值為0.02 rad,頻率為50 rad∕s的正弦擾動時系統(tǒng)仿真圖如圖5所示。
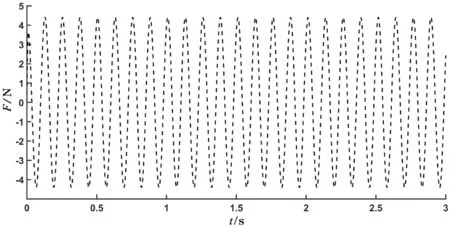
圖5 零輸入有擾動時三閉環(huán)控制系統(tǒng)仿真Fig.5 Simulation of three closed loop control system with input and non-disturbancewith zeroinput and disturbance
駕駛員輸入力為100 N,加入幅值為0.02 rad,頻率為50 rad∕s的正弦擾動時系統(tǒng)仿真圖如圖6所示。
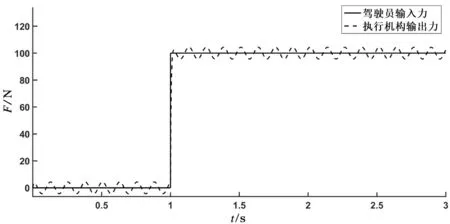
圖6 有輸入有擾動時三閉環(huán)控制系統(tǒng)仿真Fig.6 Simulation of three closed loop control system with input and disturbance
由圖4可知,在理想情況即無擾動狀態(tài)下,系統(tǒng)的響應(yīng)速度很快,在1.05 s時就達(dá)到穩(wěn)定狀態(tài),執(zhí)行機(jī)構(gòu)的輸出穩(wěn)態(tài)誤差小于0.5%,所以三閉環(huán)控制系統(tǒng)在無擾動時響應(yīng)速度與力跟蹤精度都有較高保障;由圖5可知,系統(tǒng)在只有擾動的狀態(tài)下,執(zhí)行機(jī)構(gòu)仍有4.4 N的力輸出,即多余力達(dá)到4.4 N;由圖6可知,當(dāng)系統(tǒng)有100 N的力輸入且有擾動時,執(zhí)行機(jī)構(gòu)的輸出穩(wěn)態(tài)誤差達(dá)到4.4%。
由此可知,擾動的存在對系統(tǒng)的穩(wěn)定性有很大影響,三閉環(huán)控制系統(tǒng)的抗干擾能力不足。
(2)復(fù)合校正系統(tǒng)
駕駛員輸入力為零,加入幅值為0.02 rad,頻率為50 rad∕s的正弦擾動時系統(tǒng)仿真圖如圖7所示。
駕駛員輸入力為100 N,加入幅值為0.02 rad,頻率為50 rad∕s的正弦擾動時系統(tǒng)仿真圖如圖8所示。
由圖7可知,當(dāng)加入前饋補(bǔ)償裝置后,系統(tǒng)在只有擾動狀態(tài)下,多余力最大為1.1 N,系統(tǒng)穩(wěn)定后,多余力減小到0.35 N;由圖8可知,當(dāng)系統(tǒng)有100 N的力輸入且有擾動時,執(zhí)行機(jī)構(gòu)的輸出穩(wěn)態(tài)誤差小于1%。
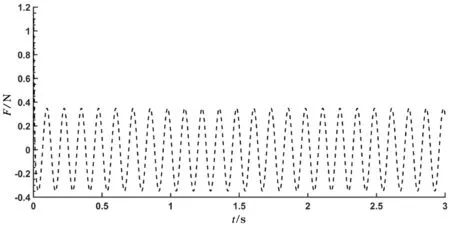
圖7 零輸入有擾動時復(fù)合校正系統(tǒng)仿真Fig.7 Simulation of acompound correction system
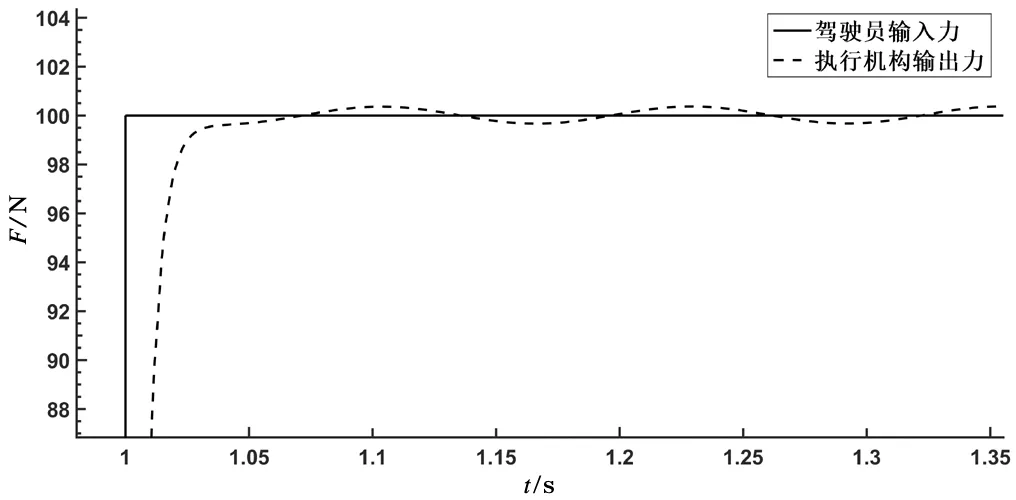
圖8 有輸入有擾動時復(fù)合校正系統(tǒng)仿真Fig.8 Simulation of a compound correction system with zero input and disturbance with input and disturbance
由此可知,當(dāng)加入前饋補(bǔ)償裝置后,多余力得到了有效抑制,系統(tǒng)的抗干擾性能明顯提高,相比三閉環(huán)控制系統(tǒng)有更高的力跟蹤精度。
5 結(jié)束語
(1)以主動桿的力加載系統(tǒng)為研究對象,建立了主動桿的力加載三閉環(huán)控制系統(tǒng)數(shù)學(xué)模型。
(2)以抑制主動桿力加載系統(tǒng)的多余力和提高加載系統(tǒng)抗干擾能力為目標(biāo),分析了多余力存在的原因,以力加載三閉環(huán)控制系統(tǒng)為基礎(chǔ),采用加入前饋補(bǔ)償裝置的復(fù)合校正方法對干擾進(jìn)行補(bǔ)償,從而抑制了多余力的存在,提高了系統(tǒng)抗干擾能力。
(3)利用Simulink仿真平臺對力加載三閉環(huán)控制系統(tǒng)與復(fù)合校正系統(tǒng)進(jìn)行仿真分析與對比,結(jié)果表明復(fù)合校正系統(tǒng)明顯提高了主動桿力加載系統(tǒng)的抗干擾能力,多余力得到了有效抑制。
(4)本文研究對主動桿執(zhí)行機(jī)構(gòu)的控制系統(tǒng)設(shè)計有一定實(shí)際應(yīng)用價值,可為國內(nèi)主動桿裝置的研發(fā)提供一定的參考。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
汽車電器(2018年1期)2018-06-05 01:22:54
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45