基于動力性指標的純電動汽車電機參數設計
2018-12-08 11:09:48張永龔春忠張洪雷彭慶豐
汽車科技 2018年5期
張永 龔春忠 張洪雷 彭慶豐
摘 要:電機是純電動汽車的機械動力輸出源,電機參數決定了電動汽車的最高車速、加速性能、最大爬坡度等整車動力性能。本文通過對這三類動力性指標的分析,設計電機的最高轉速、峰值功率等參數。其中,加速性能指標解析使用微分方程的數值解法、單純形最優化法、數據線性插值法等多種數學工具。最終各指標通過冗余設計獲取電機參數。
關鍵詞:純電動汽車;動力性指標;電機參數設計
中圖分類號:U469.72 文獻標識碼:J 文章編號:1005-2550(2018)05-0058-06
Abstract: The motor is the mechanical power output source of pure electric vehicle, and motor parameters determine the highest speed, acceleration performance and maximum climbing degree of the electric vehicle. In this paper, the maximum speed and peak power of the motor are designed by the analysis of these three kinds of dynamic indexes. Among them, a variety of mathematical tools, such as the numerical solution of differential equations, the simplex optimization method, the linear interpolation method of data and so on, are used to analyze the acceleration performance. Finally, the parameters of the motor are obtained by the redundant design.
Key Words: Electric vehicle; power index; motor parameter design
世界上第一臺電動車誕生于1834年,它是由蘇格蘭人德文博特(Thomas Davenport)發明的,比1886年誕生的第一臺內燃機汽車還要早半個世紀。到20世紀30年代,由于電動汽車自身的不足和內燃機技術的提高,電動汽車逐漸被內燃汽車所取代[1]。然而隨著石油能源危機的臨近,以特斯拉、Leaf為代表的一批純電動汽車迅速崛起,開啟了一代電機動力驅動新研究浪潮[2]。
電動汽車動力性能是電動汽車重點課題之一。該課題研究基于汽車動力性指標對電機進行設計與選型。電動汽車動力性能指標有加速性能、爬坡性能、最高車速3類指標,《GBT 18385-2005 電動汽車動力性能試驗方法》規定了這三類指標的測試方法[3]。文獻[4]只研究了起步加速性能;文獻[5]采用了冗余設計法對汽車的加速性能、爬坡性能、最高車速進行了研究,但其加速過程只近似為勻加速,與實際相比誤差較大。還有眾多文獻通過仿真軟件或者仿真方法,對電動汽車電機進行設計選型[6]。
本文基于前人的研究,更全面地考核電動汽車動力性指標,將爬坡性能,加速時間,最高車速均納入電動汽車動力性能指標的設計范圍。使用微分方程直接對電動汽車動力系統建模,使用單純形最優化法與數據差值法對仿真結果進行處理。同時提出了空載、標準載荷、滿載三種狀態進行比較,觀察動力性指標的穩定性;并將設計結果逆推驗證各指標值及其達成率。
1 電動汽車的動力性指標
《GBT 18385-2005 電動汽車動力性能試驗方法》定義了純電動汽車加速性能、最高車速與爬坡性能的試驗方法。同時也較全面定義了電動汽車的動力性指標及其細化分類。動力性能分為加速性能、最高車速、爬坡性能3類。
1.1 加速性能
加速性能是指電動汽車從速度V1,加速到速度V2,所需的最短時間。根據V1與V2不同,我們通常關心以下3個加速性能指標:
1、0~50km/h加速時間:主要體現汽車起步加速性能。
2、0~100km/h加速時間:主要體現汽車常用車速區域加速性能。
3、50~80km/h加速時間:主要體現汽車超車過程加速性能。
本文在設計算法中預留一個自定義加速時間。
1.2 最高車速
最高車速分為瞬時最高車速與30min最高車速。標準中只規定了30min最高車速的測試方法。但未規定汽車瞬時最高車速的試驗方法。汽車的30min最高車速不僅與電機的特性有關,還與電池的容量有關,電池必須能夠提供汽車持續行駛30min的最高車速而不出現電池限功率或掉電狀態。通常情況下,都不會以電池的容量極限作為設計極限。而是以電機能夠持續30min穩定輸出功率并保持不過熱為設計條件。汽車的最高車速,則以5min最高車速的電機輸出功率為設計依據。
綜上,本文對最高車速指標的定義有兩個:
1、5min最高車速:體現汽車瞬時最高車速能力。
2、30min最高車速:體現汽車持續行駛最高車速能力。
1.3 爬坡性能
標準中定義了坡道起步能力與坡度車速。其試驗方法如下定義:
1、汽車坡道起步能力:電動汽車在坡道上能夠起動且 1min內向上行駛至少10 m的最大坡度。表現了汽車的坡道起步能力。本文定義坡道起步能力使用5km/h車速下的最大爬坡能力等效。
2、坡度車速:電動汽車在給定坡度的坡道上能夠持續行駛1km以上的最高平均車速。表現了汽車在行駛過程中最大的爬坡性能。設計時,通常以20km/h或50km/h的車速作為最大爬坡能力的參考。
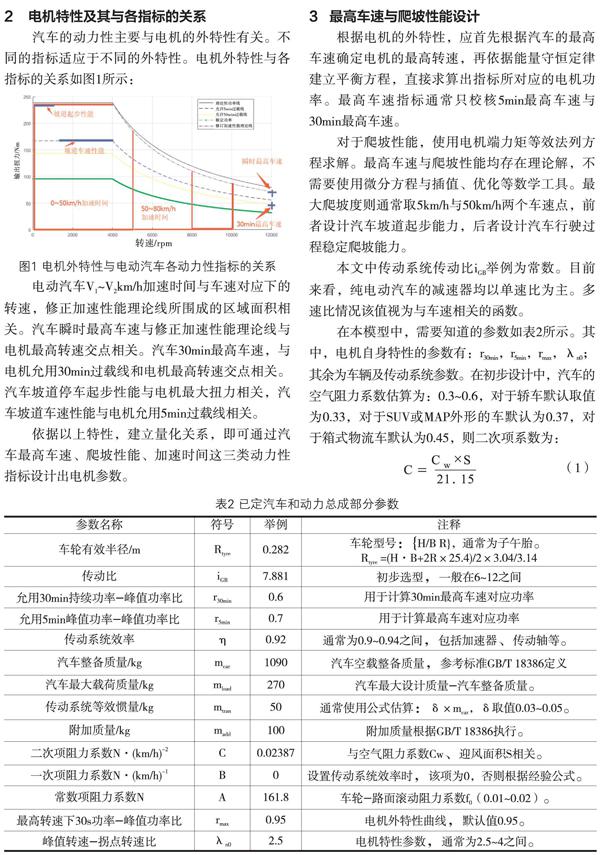
2 電機特性及其與各指標的關系
汽車的動力性主要與電機的外特性有關。不同的指標適應于不同的外特性。電機外特性與各指標的關系如圖1所示:
電動汽車V1~V2km/h加速時間與車速對應下的轉速,修正加速性能理論線所圍成的區域面積相關。汽車瞬時最高車速與修正加速性能理論線與電機最高轉速交點相關。汽車30min最高車速,與電機允用30min過載線和電機最高轉速交點相關。汽車坡道停車起步性能與電機最大扭力相關,汽車坡道車速性能與電機允用5min過載線相關。
依據以上特性,建立量化關系,即可通過汽車最高車速、爬坡性能、加速時間這三類動力性指標設計出電機參數。
3 最高車速與爬坡性能設計
根據電機的外特性,應首先根據汽車的最高車速確定電機的最高轉速,再依據能量守恒定律建立平衡方程,直接求算出指標所對應的電機功率。最高車速指標通常只校核5min最高車速與30min最高車速。
對于爬坡性能,使用電機端力矩等效法列方程求解。最高車速與爬坡性能均存在理論解,不需要使用微分方程與插值、優化等數學工具。最大爬坡度則通常取5km/h與50km/h兩個車速點,前者設計汽車坡道起步能力,后者設計汽車行駛過程穩定爬坡能力。
本文中傳動系統傳動比iGB舉例為常數。目前來看,純電動汽車的減速器均以單速比為主。多速比情況該值視為與車速相關的函數。
4.3 使用單純形法優化求解
對于不同車速加速度段指標,在式(13)中設置v1,v2即可。本文基于(13)式設計電機的不同指標功率有如下4項:P0~50,P50~80,P0~100,Pv1~v2。
該最優化問題只有 待優化參數,因此使用二分法、最速下降法、單純形優化法等優化工具都是可行的。本文發現使用單純形法解該問題速度更快,且MATLAB中自帶該函數。因此本文選擇使用單純形法求解該優化問題。
5 設計實例
重新依據公式(1)~(12)逆向計算出真實指標與目標指標的偏差,作為指標達成度。達成度越大的指標說明初始指標定義過高;達成度越小的指標為100%,說明該指標是當前定義的所有指標中動力系統最難以達成的指標。
5.1 已知參數
純電動汽車設計階段,首先根據市場調研結果對車身參數與動力性指標進行初步定義。表1所示舉例為某車型的市場調研階段定義的動力性能指標,表2所示舉例為該車型整車及動力總成已知參數。基于以上公式在MATLAB中編制設計程序,設計結果如下。
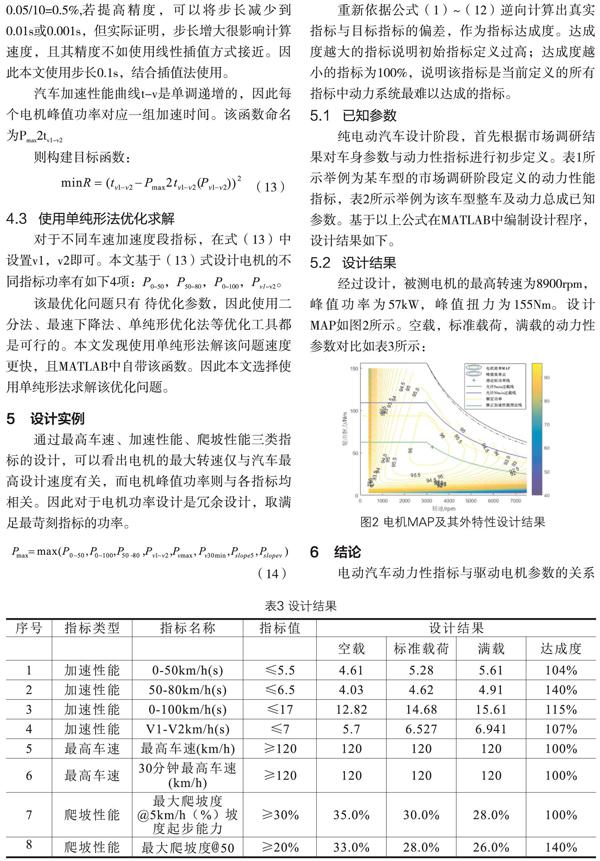
5.2 設計結果
經過設計,被測電機的最高轉速為8900rpm,峰值功率為57kW,峰值扭力為155Nm。設計MAP如圖2所示。空載,標準載荷,滿載的動力性參數對比如表3所示:
6 結論
電動汽車動力性指標與驅動電機參數的關系研究具有冗余設計的特點。將設計指標定義全面,各指標設計求算更合理,才能獲得更高精度的設計結果。本文總結了電動汽車的加速性能指標、爬坡性能指標、最高車速指標,并研究了各類指標的設計方法。實踐證明,該方法有效可靠,應用于電機選型設計階段。當電機選型確定并在市場上找到對應的電機供應商以后,為下一步汽車動力性經濟性仿真開發工作提供更精確的電機參數。
參考文獻:
[1]張鐵臣.電動汽車動力性的仿真[D].河北工業大學,2004.
[2]郭曉際.特斯拉純電動汽車技術分析[J].科技導報,2016,34(06):98-104.
[3]GBT 18385-2005電動汽車動力性能試驗方法.
[4]汪貴平,馬建,楊盼盼,閆茂德.電動汽車起步加速過程的動力學建模與仿真[J].長安大學學報(自然科學版),2009,29(06):98-102.
[5]謝雅,黃中華.電動汽車動力系統設計與性能仿真[J].湖南工程學院學報(自然科學版),2016,26(04):27-30.
[6]Ko, Sungyeon, Ko, Jiweon,Lee, Sangmoon,Cheon, Jaeseung,Kim, Hyunsoo. A study on the road friction coefficient estimation and motor torque control for an in-wheel electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers,2015,229(5).
[7]GBT 18386-2017電動汽車 能量消耗率和續駛里程 試驗方法.