小型四軸飛行器控制系統的研究
2018-12-12 07:25:16李邵穎趙文娟王増彩
時代農機 2018年10期
李邵穎,趙文娟,王増彩
(沈陽工學院,遼寧 撫順 113122)
四軸飛行器是一種結構新穎、性能卓越的新型無人機。具有適應性強、成本較低、控制方式便捷等優點,目前已廣泛應用在農業、航拍、軍事等領域。國外對四旋翼飛行器的研究偏向于電子領域、控制領域、以及材料領域的快速發展和技術突破。國內研究更多的是偏向于飛行器的飛行器建模、控制策略等方面的研究。
1 小型四軸飛行器系統的總體設計
此小型四軸飛行器以STM32F103CB為主控芯片,采用四元數,結合PID控制算法并利用RTX實時操作系統對其進行姿態控制。飛行過程中只需實時調整四個旋翼電機的轉速即可實現各種復雜運動。通過MPU6050運動處理傳感器采集等安裝在四軸飛行器上的多個傳感器并發處理,采集四軸實時飛行姿態,電池電量等信息。其四軸飛行器的遙控控制部分采用無線通訊模塊WFT072.4 GHz。
2 小型四軸飛行器的硬件設計
四軸飛行器控制系統硬件部分主要包括主控模塊、電源模塊、無線通訊模塊、MPU6050運動處理傳感器、電子羅盤以及電機驅動模塊等部分。
2.1 主控模塊
四軸飛行器主控模塊采用STM32F103CB芯片此系列芯片采用ARMCoretex-M3內核,具有低功耗、超高速等優點,四軸飛行器在工作期間STM32將接受到的遙控命令數據與將當前姿態與目標姿態進行比較,經PID控制算法,輸出相應的PWM波到電機驅動模塊,從而實現姿態調整。
2.2 電機驅動模塊
電機驅動模塊與普通MOS管元件組成電機模塊不同。四軸飛行器采用的無刷電機需單獨設計電子調速器作為電機驅動模塊,并且還需考慮開關頻率特性,依據電機控制速率選取不同工作頻率元器件。
2.3 MPU6050運動處理傳感器
MPU-60X0運動處理傳感器是全球首例9軸運動處理傳感器。它集成了3軸MEMS陀螺儀和加速度計,對陀螺儀和加速度計分別采用三個16位的ADC,將其測量的模擬量轉化為可輸出的數字量。解決了組合陀螺儀與加速器時間軸之差的問題,并且減少了大量的封裝空間。
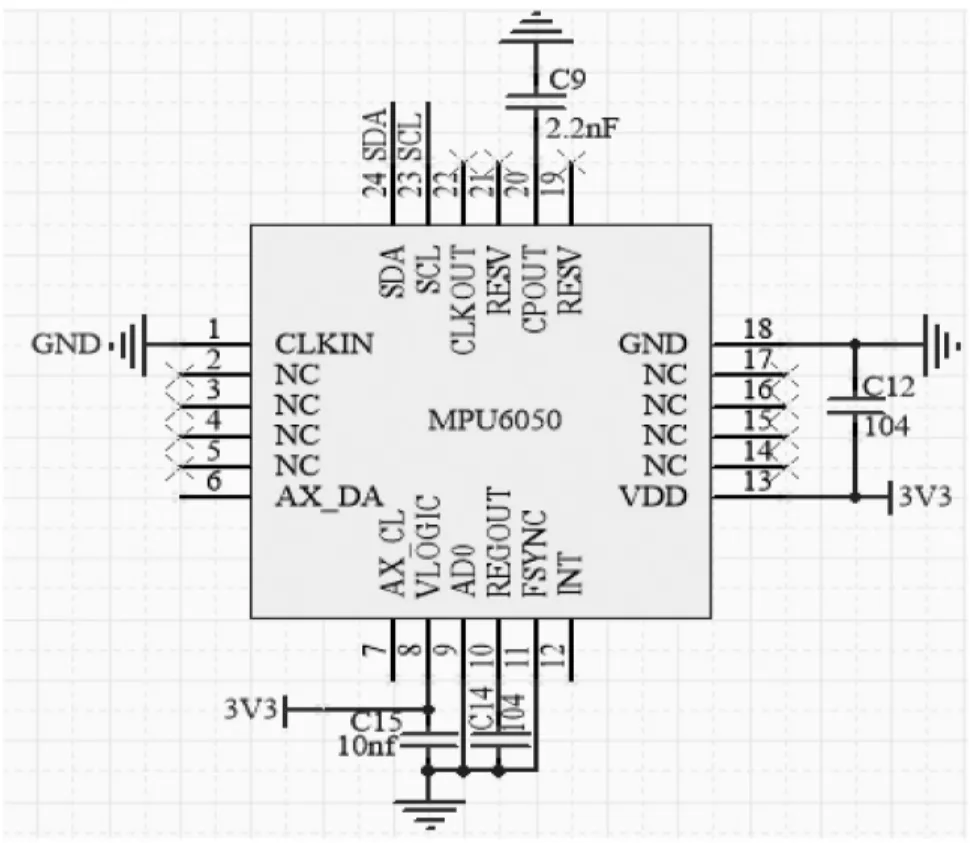
圖1 四軸飛行器的運動處理傳感器
3 四軸飛行器軟件的設計
遙控器是一種用來遠程控制某個裝置的器件。本次設計借助了eclipse軟件對四軸飛行器的遙控APP的手機應用進行編寫,采用JAVA語言編程APP界面上設有油門滑塊,偏航滑塊用來控制四軸飛行器螺旋槳轉速的快慢和偏航方向。
4 結語
本文主要介紹了飛行器完成的結果,已初步完成了基本的飛行動作,達到預期的標準。