自感應式飛艇囊體靜電測試控制器設計
2018-12-15 07:05:44彭平
電子設計工程 2018年23期
彭平
(中國特種飛行器研究所湖北荊門448035)
飛艇是利用充氦氣來提供升力的浮空飛行器,其相對于飛機來說,具有滯空時間長、效費比極高這兩個顯著的優點。因此,近年來順應軍事應用的需求,飛艇作為一種高空偵查、通信中繼、環境監測、城市安全監控、預警等平臺,迅速引起了美國、歐洲、日本及韓國等眾多國家的高度重視和發展。然而,由于飛艇囊體材料對抗拉伸斷裂強力、面密度和氦氣透氣量等特性都有較高的要求[1-2],目前尚無單一材料可以全面滿足這些要求。因此,現階段飛艇囊體一般采用復合材料,而合成的復合材料大多電導率很小,產生的靜電很容易積累,而靜電是同性束縛電荷的積累,當靜電積累到一定程度時,在電場的作用下,這些靜電區域附近沿電場方向的空氣會發生擊穿,造成短時間的局部高壓放電[3],干擾飛艇艇載電子電氣設備,損害電子設備或器件等。在飛艇外場飛行試驗過程中,對于積累在飛艇囊體表面上的靜電目前沒有有效的檢測措施,而長期積累的靜電放電會給飛艇的安全飛行構成安全隱患。為了能夠有效及時地監測飛艇囊體表面靜電積累及分布情況,防止靜電積累,必須要對囊體表面的靜電特性進行檢測,了解飛艇囊體表面靜電的累積情況,分析靜電在囊體上分布特性以評價靜電的危險程度,為高空大型飛艇囊體表面靜電防護提供可靠試驗依據。
1 系統總體設計
測試控制器由STC89C52單片機、電容式靜電傳感器、信號放大電路和濾波電路組成。當靜電傳感器感應到囊體表面上的靜電時,靜電傳感器將感應出同頻率的直流反饋信號輸出,通過信號放大電路將信號放大后濾波,最后通過單片機內的邏輯判斷程序進行比較判斷,解算、排序、打包后通過艇載無線數傳電臺傳回地面,其設計原理如圖1所示。
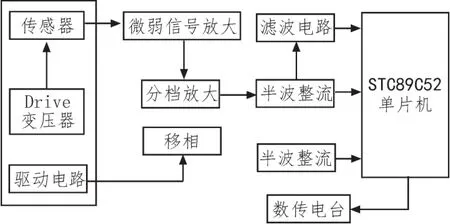
圖1 設計原理框圖
2 硬件設計
2.1 STC89C52單片機
測試控制器選用單片機作為控制芯片,采用STC89C52單片機[4]結合外界輔助電路構成。該單片機是32位的ARM Cortex—M3內核,穩定工作頻率可達72 MHz,擁有從64 kB到128 kB的閃存可選程序存儲器,20 kB的SRAM,2個12位模數轉換器,是一個低功耗高性8位單片機,結合8位微處理器和Flash存儲技術構成功能強大單片微處理器,完全滿足系統設計的需求。在本設計中,在單片機XTAL1(19腳)和XTAL2(18腳)引腳上接上石英晶體構成時鐘脈沖信號的自激振蕩器。
2.2 靜電傳感器
靜電傳感器一般由傳感器電極、絕緣管以及電磁屏蔽罩三部分組成,其原理是通過改變置于靜電場中的平板電容值來引起極板上電荷的變化從而產生微弱電流,再利用放大電路對此電流放大。當靜電傳感器檢測電極檢測到飛艇囊體表面帶電顆粒時,由于靜電感應,在靜電電極內外表面將產生大小相等、符號相反的電荷,因此,靜電傳感器可以用電路等效靜電傳感器敏感元件[5-6],等效電路如圖2所示。
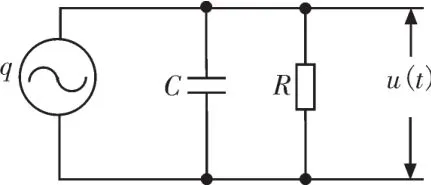
圖2 靜電傳感器等效電路圖
從傳感器等效電路可以得到,靜電傳感器的輸出信號是其對地電容上的感應電荷[7-8],并在其上建立電壓,信號極其微弱,但其泄漏電阻卻較大,所以,靜電傳感器具有泄漏電阻大、電荷信號微弱的特點。
2.3 前置放大電路設計
由于靜電傳感器工作由平板電容的振蕩極感應輸出約為10-9數量級的低頻微弱靜電電流信號(頻譜范圍0~1.5 kHz之間),在靜電監測過程中,依據靜電傳感器的采集原理,如果靜電傳感器采集的信號有少量電荷泄漏掉,將會對測試結果造成很大的測量誤差[9-10],無法準確的定位飛艇囊體靜電的積累情況。因此,文中將采用雙運放LF324AD組成的具有高精度、高增益、高輸入阻抗、高共模抑制比和低溫漂等特點的兩級前置放大電路[11],將放置放大電路放置在靜電傳感器內部,以對靜電傳感器信號源起到阻抗匹配和初步的電荷放大功能,如圖3所示。
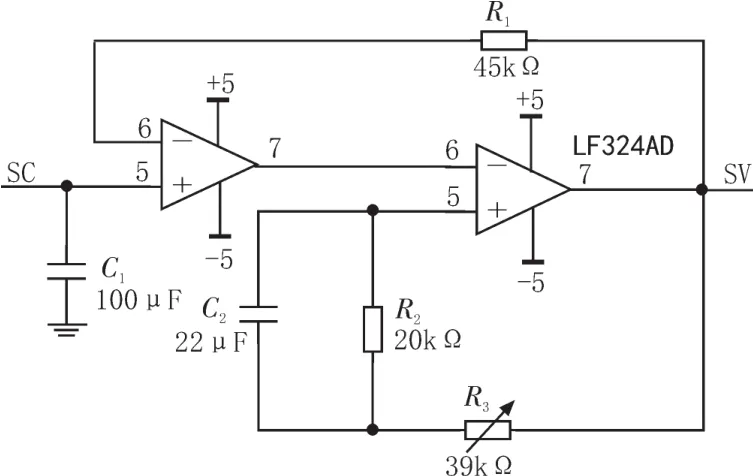
圖3 前置放大電路
2.4 信號分檔放大電路設計
靜電信號為微弱電流信號,靜電傳感器采集信號時的量化誤差較大,從而降低信號采集的精度,影響測量結果。為了提高測量的準確度,微弱信號經前置放大電路放大后,需再經一級分檔放大,分檔放大后輸出正負交替的方波信號。方波信號經移相整流后送至A/D端供使用[12-13]。圖4為分檔放大電路。
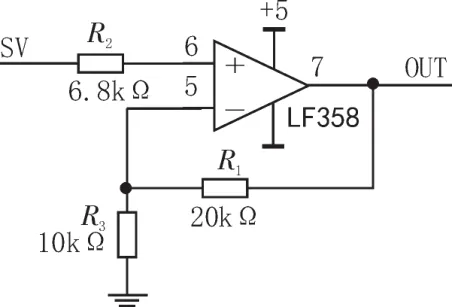
圖4 信號分檔放大電路
2.5 濾波電路
靜電傳感器所采集到飛艇囊體表面的靜電信號經過放大電路以后認為mV級信號,外界環境及艇上電子電氣設備的噪聲對靜電信號影響非常明顯。因此,設計濾波電路對靜電信號進行濾波處理。使用MCP6021T-E/OT組成有源低通濾波電路,對信號源進行濾波和電荷放大功能[14-15],如圖5所示。
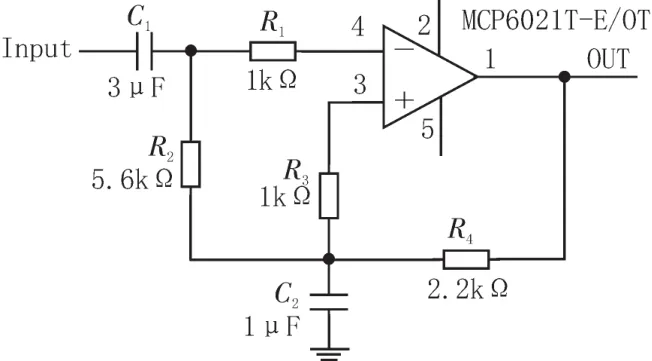
圖5 濾波電路
2.6 A/D轉換電路
將微弱信號經過放大、整流、濾波后變為直流信號,然后通過A/D轉換,最后輸入單片機進行處理。本系統選用AD574A轉換芯片,如圖6所示。
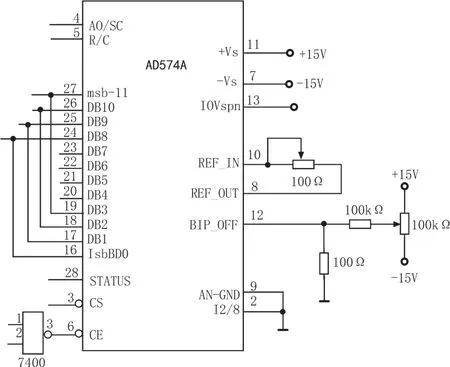
圖6 AD574A
該轉換芯片轉換時間為25 us,線性誤差為±1/2LSB,內部具有時鐘脈沖源和基準電壓源。該模塊采用單極性對模擬信號進行轉換,其高8位數據線接單片機數據線,低4位數據線接單片機的低4位數據線,其信號要求無論是單片機對其啟動控制還是對轉換結果的讀取都應為高電平有效,單片機對轉換結果的讀取采用查詢方式。
3 軟件設計
靜電傳感器輸出信號經過放大、整流和濾波后傳送給單片機,其信號的正負判別、A/D轉換、誤差修正及數據傳輸等功能均由單片機軟件來實現。
3.1 數據通信
靜電控制器與地面站之間的通信采用數傳電臺模塊,數據波特率9 600,地面站數傳電臺模塊經過芯片轉換為USB接口與地面站計算機連接。單片機發送的數據存儲早TEMP中,數據每發送一次后TEMP自動加1,然后延時1 s在進行下一次發送。
3.2 軟件流程
軟件采用C語言模塊程序設計技術,包括主程序、數據采集、數據處理和數據發送。單片機上電后完成系統初始化,包括設置波特率為9 600 bps,定時器T工作方式,RS232串行口工作方式,開中斷,進行數據采集,A/D轉換、數據求平均,數據轉換,將轉換后的數據存入緩沖區,等待發送。其程序流程圖如圖7、圖8所示。
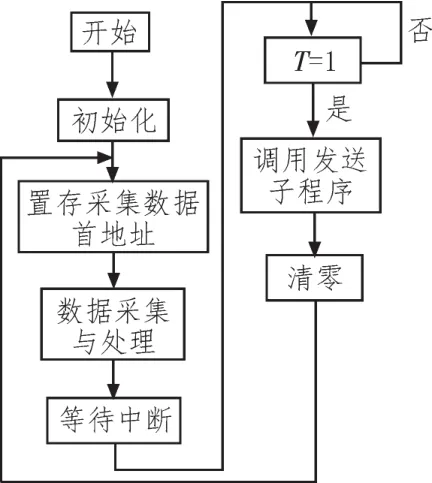
圖7 程序控制流程

圖8 A/D程序流程
4 試驗與分析
4.1 靜電監測試驗
由于飛艇在實際飛行過程中遇到的情況比較復雜,采用隨艇飛行監測的數據準確度不容易采集及控制。因此,采用在飛艇飛行結束以后在實驗室內對飛艇囊體表面靜電進行監測,根據飛艇囊體表面結構的特點在飛艇囊體表面選取A、B、C、D、E、F、G等7個作為靜電采集監測點,如圖9所示。
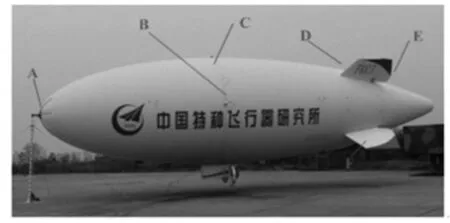
圖9 飛艇表面靜電監測點分布圖
通過使用靜電監測器長期,多角度對飛艇囊體表面的靜電進行監控,采集系列靜電數據后進行分析,準確掌握飛艇在試驗飛行過程或在地面長期錨泊過程中飛艇囊體表面靜電積累的部位及分布規律,分析靜電積累特性及靜電放電對艇載設備的影響。
4.2 測試數據和誤差分析
本試驗有效測量選取200~10 000 V,這就要求放大電路和A/D工作在30倍寬的范圍內,勢必降低準確度,尤其是低端的量化誤差會很大,試驗數據誤差主要來源于以下幾個方面:
1)靜電測量采用非接觸性傳感器,當距離改變時傳感器的輸出明顯改變,因而保證傳感器與被測物體之間的準確定位是減少測量誤差的有效手段;
2)傳感器振梁振幅的波動將引入較大的誤差,這一點可通過傳感器的良好設計和加工改善;
3)靜電傳感器的非線性特征產生的誤差。
4)傳感器輸出經微弱信號放大也會產生誤差,數據經A/D轉換為8位,引入一定的量化誤差。
5)在囊體表面設置固定探頭的支架,而且探頭到囊體表面的距離也會隨著囊體內氣壓的變化而改變,給測量的數據引入不確定的誤差。
根據飛艇飛行后對囊體表面靜電的試驗實測數據統計與分析,結合所有因素造成總的誤差進行分析,對所采集到的飛艇囊體靜電數據進行曲線擬合[16],擬合后的誤差如表1所示,獲得了較高的測量準確度。
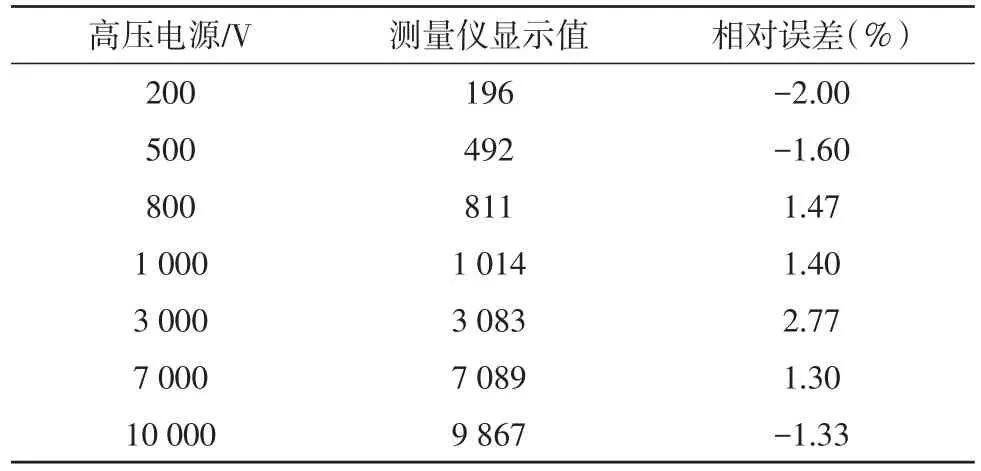
表1 測試數據與誤差
5 結論
文中提出了一種基于單片機自感應式飛艇表面靜電測試控制器設計方法,該設計由單片機、電容式靜電傳感器,信號放大電路、信號分檔放大電路和信號濾波電路組成。分析靜電放電對飛艇艇載設備的干擾和破壞以及由于靜電產生的嚴重后果。通過對囊體表面的靜電特性進行檢測,掌握飛艇在飛行或長期地面錨泊過程中囊體表面靜電積累的部位及分布規律,為高空大型飛艇囊體表面靜電防護提供可靠試驗依據。試驗結果表明,該設計具有測試精度高,實用性強等特點。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
