采摘機械臂結(jié)構(gòu)參數(shù)對其工作空間的影響
2018-12-19 08:51:56伍輯軍程祥云
江蘇農(nóng)業(yè)科學(xué) 2018年22期
伍輯軍, 宋 欣, 楊 磊, 程祥云
(天津農(nóng)學(xué)院工程技術(shù)學(xué)院,天津 300384)
在果蔬生產(chǎn)中,收獲采摘作業(yè)約占整個作業(yè)量的35%~45%[1]。為保證果實的新鮮程度,須要在短時間內(nèi)完成采摘作業(yè),屬于季節(jié)性強的勞動密集型作業(yè)。但是,隨著我國城鎮(zhèn)化進程的加快,農(nóng)村勞動力老齡化和農(nóng)業(yè)勞動力短缺的問題日趨嚴(yán)重,導(dǎo)致了勞動力成本的增加和采摘效率的降低。因此,大力發(fā)展和推廣采摘機器人,用自動化和智能化的作業(yè)方式取代人工采摘,從而解放生產(chǎn)力、提高勞動生產(chǎn)效率和降低生產(chǎn)成本,具有廣闊的需求空間和重要的實用價值、經(jīng)濟效益。
采摘機械臂是采摘機器人的重要執(zhí)行部件,它的工作空間是評價機械臂工作性能的一個重要指標(biāo),描述了機械臂在結(jié)構(gòu)約束下,末端參考點所能達(dá)到的空間點集合[2]。機器人工作空間求解通常采用圖解法、解析法以及數(shù)值法。其中,圖解法可以繪制出工作空間的剖截面,比較直觀,但會受到關(guān)節(jié)數(shù)的限制[3]。解析法是通過多次包絡(luò)來確定工作空間邊界,并用方程表示出來,但直觀性較差,計算繁瑣,一般只適用于關(guān)節(jié)數(shù)少于3個的機器人[4]。數(shù)值法是以極值理論和優(yōu)化方法為基礎(chǔ),計算機械臂工作空間邊界曲面上的特征點,構(gòu)成邊界曲線進而再構(gòu)成邊界曲面[5]。這種方法的缺點是計算量太大,有些邊界曲面可靠性得不到保證。在數(shù)值法中,以蒙特卡洛法[6]的使用最為普遍,適合于任何關(guān)節(jié)型機械臂工作空間求解。但是由于蒙特卡洛法是在約束條件內(nèi)產(chǎn)生一系列隨機點的云圖,一方面,隨機點的產(chǎn)生雖然符合均布分布,但仍舊隨著隨機性,體現(xiàn)為隨機數(shù)目選取越多,所得到的工作空間越逼近機械臂實際工作域的近似工作域,且逼近程度取決于隨機數(shù)的數(shù)量;另一方面,蒙特卡洛法沒有完全考慮機械臂本身結(jié)構(gòu)尺寸干涉而導(dǎo)致的工作空間區(qū)域減少。
因此,本研究提出采用Adams運動仿真和圖解法相結(jié)合的方法來確定采摘機械臂的工作空間邊界,能盡量真實且直觀地表達(dá)出機械臂實際工作空間,有助于實現(xiàn)工作空間的精確計算。并且在采用凸包函數(shù)計算工作空間體積的基礎(chǔ)上,開展機械臂結(jié)構(gòu)參數(shù)對工作空間體積的影響分析。
1 采摘機械臂基本構(gòu)型
本研究的采摘機械臂采用關(guān)節(jié)型開鏈結(jié)構(gòu)形式,主要由基座、大臂、小臂、手腕和末端執(zhí)行器組成。擁有6個自由度,分別為腰關(guān)節(jié)、肩關(guān)節(jié)、肘關(guān)節(jié)和3個腕關(guān)節(jié)(圖1)。其中,機械臂的空間位置主要是由腰關(guān)節(jié)、肩關(guān)節(jié)和肘關(guān)節(jié)的參數(shù)來確定,機械臂的空間姿態(tài)是由腕關(guān)節(jié)參數(shù)來確定。

2 采摘機械臂工作空間的模擬及邊界分析
本研究采用Adams運動仿真和圖解法相結(jié)合的方法模擬采摘機械臂的工作空間。首先,利用Adams的運動仿真結(jié)果得到采摘機械臂在圓周范圍內(nèi)所能達(dá)到的極值點坐標(biāo),然后通過包絡(luò)這些極值點來得到機械臂實際的工作空間。圖2為機械臂在XOZ平面上的工作空間邊界,其工作空間的外輪廓邊界大致為x∈[-1 984.7,2 829.7] mm,y∈[-1 984,1 985] mm,z∈[-761.2,3 098.2]mm。工作空間內(nèi)輪廓不規(guī)則,按照以腰關(guān)節(jié)為坐標(biāo)系原點進行統(tǒng)計,其輪廓邊界大致為x∈[-124,681] mm,y∈[-124,681] mm,z∈[0,1 065]mm,該區(qū)域內(nèi)機械臂將受到結(jié)構(gòu)參數(shù)限制或存在桿干涉而無法到達(dá)。
3 采摘機械臂結(jié)構(gòu)參數(shù)對工作空間的影響分析
在采摘機械臂工作空間分析過程中發(fā)現(xiàn),腕關(guān)節(jié)處的自由度僅對末端執(zhí)行器的姿態(tài)有影響,而對于工作空間的大小不產(chǎn)生影響,因此在進行機械臂結(jié)構(gòu)參數(shù)對工作空間的影響中可以忽略該處的自由度,得到機械臂簡化示意圖(圖3)。
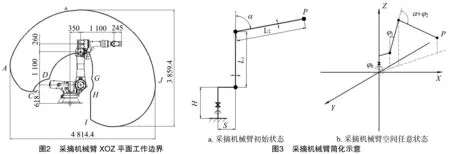
根據(jù)幾何關(guān)系,采摘機械臂末端P點坐標(biāo)可以表示為
x=[S+L1sinφ1+L2sin(φ2+α)]cosφ0;
y=[S+L1sinφ1+L2sin(φ2+α)]sinφ0;
z=H+L1cosφ1-L2cos(180°-α-φ1-φ2)。
(1)
3.1 采摘機械臂工作空間體積的計算方法
利用Matlab繪制出采摘機械臂工作空間的散點圖,結(jié)果如圖4所示。但由于散點圖只提供了工作空間包絡(luò)面的一個大致形態(tài),如果須要進行工作空間大小計算的話,還要進一步對此空間生成一個較為精準(zhǔn)的包絡(luò)空間,用該包絡(luò)空間的體積描述工作空間的大小。

空間中的包絡(luò)面是一個一般封閉體的表面,即由所有邊緣點構(gòu)成的集合,生成包絡(luò)面的關(guān)鍵在于確定全體坐標(biāo)點的邊緣面。為此,利用Matlab中的凸包函數(shù)convhull求出散點圖的凸包點,并生成若干由三角形拼接而成的包絡(luò)空間,結(jié)果如圖5所示。在此基礎(chǔ)上計算出其包絡(luò)空間,即采摘機械臂的工作空間體積。
3.2 各桿件長度對工作空間體積的影響
在其他參數(shù)不變的情況下,分別計算肩高桿長S、基座高度H、大臂桿長L1、小臂軸線與肘關(guān)節(jié)距離Lv以及小臂軸線與機械臂末端距離Lh對工作空間的影響,結(jié)果如圖6所示。

根據(jù)計算結(jié)果分析得到,除基座高度H外,其余4個因素皆對機械臂工作空間產(chǎn)生正相關(guān)影響,由擬合公式可知,桿長對工作空間的影響呈二次多項式關(guān)系。根據(jù)曲線斜率K可以分析得到,小臂軸線與肘關(guān)節(jié)距離Lv對工作空間的影響最小,其次是肩高桿長S,再次是小臂軸線與機械臂末端距離Lh,大臂桿長L1產(chǎn)生的影響最大。
在上述單一因素分析的基礎(chǔ)上,采用正交試驗方法,得到采摘機械臂工作空間與小臂軸線與肘關(guān)節(jié)距離Lv、肩高桿長S、小臂軸線與機械臂末端距離Lh,以及大臂桿長L1間的線性響應(yīng)面回歸模型:
W=-116.374 0+4.995 4×10-2S+6.157 5×10-2L1+5.35×10-3Lv+7.414 0×10-2Lh。
(2)
響應(yīng)面回歸模型的方差分析如表1所示,回歸模型的F值為892.87,P<0.000 1,差異極為顯著,證明試驗是可靠的。模型確定系數(shù)R2=0.996 9,校正確定系數(shù)AdjR2=0.995 8,表明模型可以解釋99.58%的響應(yīng)變化,模型擬合度高,試驗誤差小,能夠很好地描述各影響因子與響應(yīng)值之間的關(guān)系。依據(jù)回歸模型中的系數(shù)和方差分析可知,響應(yīng)面試驗范圍內(nèi)各影響因子的主效應(yīng)關(guān)系為大臂桿長L1>肩高桿長S>小臂軸線與機械臂末端距離Lh>小臂軸線與肘關(guān)節(jié)距離Lv。


表1 回歸模型的方差分析
利用20組試驗數(shù)據(jù)對所建立的線性響應(yīng)模型進行預(yù)測準(zhǔn)確性驗證,結(jié)果如表2所示。預(yù)測結(jié)果與試驗結(jié)果的相對誤差率在0.06%~0.96%之間,平均誤差率為0.46%。由此可知,該線性響應(yīng)回歸模型具備一定的準(zhǔn)確性,可以在設(shè)計中用于采摘機械臂工作空間的預(yù)測以及設(shè)計方案調(diào)整。
3.3 各關(guān)節(jié)轉(zhuǎn)角對工作空間的影響
在其他參數(shù)不變的情況下,分別計算各關(guān)節(jié)轉(zhuǎn)角對工作空間體積的影響,影響趨勢如圖7所示,關(guān)節(jié)轉(zhuǎn)角對工作空間的影響程度如表3所示。
由分析結(jié)果可知,腰關(guān)節(jié)轉(zhuǎn)角下限變動范圍為-180°~-40°,上限變動范圍為40°~180°,機械臂工作空間從 36.71 m3增長到71.57 m3,呈正相關(guān)趨勢,即隨著上限和下限范圍的擴大,工作空間也會增加;圖7-b中肩關(guān)節(jié)轉(zhuǎn)角變化對工作空間影響的曲面呈鋸齒狀,其下限值變動范圍為 -65°~-25°,上限值變動范圍為60°~90°,機械臂工作空間從54.00 m3增長到70.95 m3,同樣呈正相關(guān)趨勢,其上限值對工作空間的外輪廓產(chǎn)生影響,而下限值是對內(nèi)輪廓產(chǎn)生影響;圖7-c中肘關(guān)節(jié)轉(zhuǎn)角下限值變動范圍為-80°~-10°,上限值變動范圍為10°~85°,機械臂工作空間從47.02 m3增長到70.95 m3。肘關(guān)節(jié)轉(zhuǎn)角下限值對工作空間的外輪廓產(chǎn)生正相關(guān)影響,且影響程度較大,而上限值是對內(nèi)輪廓產(chǎn)生影響。從表3中的數(shù)據(jù)來看,腰關(guān)節(jié)對于工作空間的影響程度最大,肘關(guān)節(jié)其次,肩關(guān)節(jié)的影響最小。
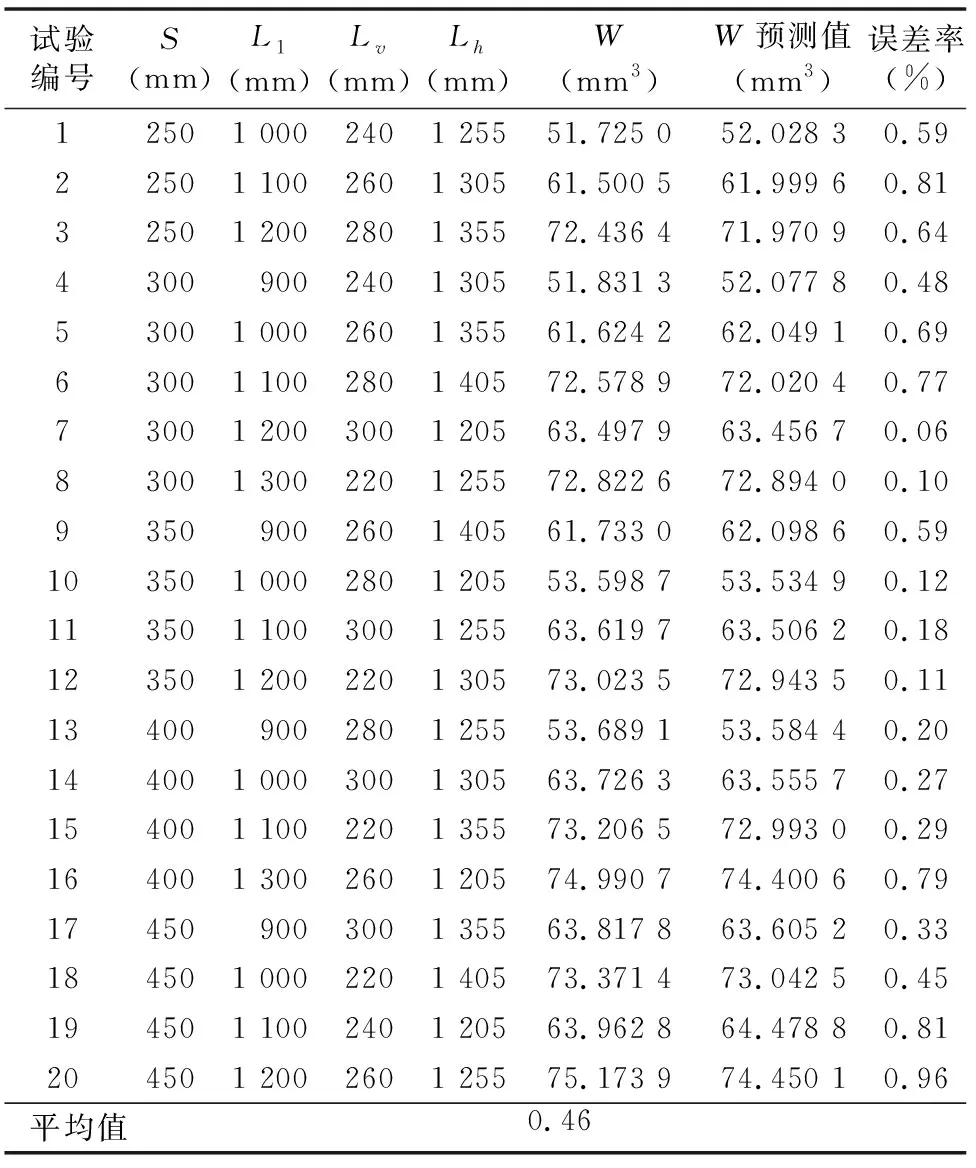
表2 回歸模型預(yù)測準(zhǔn)確性分析
4 結(jié)論
(1)采用Adams運動仿真和圖解法相結(jié)合的方法模擬了采摘機械臂的工作空間,該方法相比于蒙特卡洛法更能準(zhǔn)確地描述機械臂的可達(dá)區(qū)域。
(2)在利用Matlab繪制出采摘機械臂工作空間散點圖的基礎(chǔ)上,采用凸包函數(shù)進行處理,生成一個較為精準(zhǔn)的包絡(luò)空間來描述該工作空間的體積。
(3)通過對采摘機械臂結(jié)構(gòu)參數(shù)對工作空間的影響分析,得到各桿長參數(shù)中,小臂軸線與肘關(guān)節(jié)距離對工作空間的影響最小,其次是肩高桿長,再次是小臂軸線與機械臂末端距離,大臂桿長產(chǎn)生的影響最大。關(guān)節(jié)轉(zhuǎn)角參數(shù)中,腰關(guān)節(jié)對于工作空間的影響程度最大,肘關(guān)節(jié)其次,肩關(guān)節(jié)的影響最小。上述結(jié)論為機械臂的結(jié)構(gòu)設(shè)計和優(yōu)化提供了理論依據(jù)。
(4)建立了線性響應(yīng)回歸模型用于預(yù)測采摘機械臂工作空間以及設(shè)計方案調(diào)整,并通過試驗數(shù)據(jù)驗證了該模型的準(zhǔn)確性。

表3關(guān)節(jié)轉(zhuǎn)角對工作空間的影響程度
關(guān)節(jié)部位關(guān)節(jié)轉(zhuǎn)角范圍增長率(%)工作空間體積增長率(%)腰關(guān)節(jié)3594.96肩關(guān)節(jié)1631.39肘關(guān)節(jié)7050.89
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
中國塑料(2016年3期)2016-06-15 20:30:00

- 江蘇農(nóng)業(yè)科學(xué)的其它文章
- 中國蓮P1B -ATPase亞家族成員的生物信息學(xué)分析
- 農(nóng)業(yè)新動能培育視角下農(nóng)村電子商務(wù)發(fā)展研究
——基于句容市“農(nóng)村電子商務(wù)進村入戶工程”的調(diào)查 - 新疆農(nóng)業(yè)碳排放與農(nóng)業(yè)經(jīng)濟增長的響應(yīng)關(guān)系
- 農(nóng)村耕地流轉(zhuǎn)市場發(fā)育成熟度評價
——以遼寧省沈陽市為例 - 中國區(qū)域經(jīng)濟-科技-農(nóng)業(yè)現(xiàn)代化-生態(tài)環(huán)境耦合度空間差異分析
- 山地丘陵區(qū)未利用地生態(tài)風(fēng)險評價及開發(fā)工程匹配
——以河北省懷來縣為例