GYROX Ⅱ全站式陀螺儀定向測量技術研究
2018-12-25 09:55:14高常寶
中國礦山工程 2018年6期
關鍵詞:測量
高常寶
(金誠信礦業管理股份有限公司, 北京 100070)
1 前言
隨著國家“一帶一路”戰略的推進,國內外基礎設施投資不斷加大,測量任務跨行業、跨區域已成為新常態,對測量工作提出了新要求。在礦山井巷、公路鐵路隧道、城市地鐵等地下工程施工中經常需要高精度的測量定向。幾何定向和低精度的陀螺定向測量難以滿足工程需要,隨著衛星導航技術、光電一體技術、信息處理技術在測繪行業的應用,新儀器不斷涌現,測量機器人發揮了測量精度高、操作簡便、穩定性好的特點,例如自動全站式陀螺儀在工程定向測量中就充分體現了自動化的優勢,在國內外得到了成功應用。金誠信礦業管理股份有限公司使用GYROX Ⅱ自動全站式陀螺儀在云南會澤礦、瀾滄礦、湖北三鑫銅礦、銅綠山礦、江西銀山礦、陜西潼金礦、贊比亞謙比希礦等國內外多個礦井建設中完成了陀螺定向測量工作,并積累了大量經驗。在Zambia Chambishi Mining使用索佳GYROX Ⅱ自動全站式陀螺儀,采用跟蹤逆轉點法進行陀螺定向測量,井上、井下使用索佳CX-52全站儀按5″控制導線等級要求施測,確保了東南礦體兩條千米豎井間、主礦體與西礦體間順利貫通。
2 陀螺定向原理
2.1 陀螺的基本特性
(1)定軸性:陀螺是一個瞬間慣量很大的高速旋轉馬達,當轉子角動量大且轉子為自由懸掛時,其轉軸方向
在空間保持不變,即陀螺軸在不受外力作用時,它的方向始終指向初始恒定方向[1]。
(2)進動性:當在轉軸上施加扭矩時轉軸將由于進動性而朝轉矩矢量方向移動,即陀螺軸在受到外力作用時將產生非常重要的進動效應[2]。
2.2 GYRO X Ⅱ陀螺儀定向原理——鐘擺式陀螺
(1)GYRO X II懸掛式陀螺儀機體內置懸掛帶掛著陀螺馬達(陀螺擺),架設到SX全站儀上組成全站式陀螺儀,陀螺擺繞地球子午線擺動(進動)。在懸掛帶無扭矩的情況下,慢慢旋轉全站儀進行跟蹤進動的兩個逆轉點方向值,SX計算出進動的中心即真北方向。
(2)當地球重力給陀螺擺施加了扭矩所產生的向量朝北,旋轉軸的N端(轉子的向量)開始向北方向進動,此時重力引起的扭矩使進動繼續并在北方向時進動速度達到最大。當N端越過北方向后重力矩又使新的N端(原S端)下降致使進動速度降低,當新的S端進動到這一端同樣的象限角時又開始向北方向運動。地球不停地旋轉和馬達運行狀態下旋轉軸將在北方向左右往復運動[3]。
2.3 跟蹤逆轉點法
(1)進行真北測量時,不停地轉動全站儀,使光標始終大致保持刻度0點上,當光標接近逆轉點時,其移動會逐漸變緩,直到停止,然后光標將會向著相反的方向移動,這一過程會重復多次。全站儀利用多次測得的逆轉點處的水平角度,計算出中值(真北方位角)。
(2)光標的移動可以看作是陀螺的進動。正弦波的頂點就是逆轉點,這些逆轉點可以通過光標的移動觀測。
3 陀螺觀測程序
3.1 測量程序
陀螺定向工作執行“3- 2- 3”的測量程序,即下井前在地面已知邊上采用三測回測量陀螺方位角,在井下定向邊上采用兩測回測量陀螺方位角,上井后再用三測回測量陀螺方位角,其中下井前和上井后測量的陀螺方位角是用來求陀螺儀的常數的[4]。
3.2 一測回觀測步驟
1)安置儀器
(1)測點上安置儀器時要嚴格整平對中,觀測過程中水準氣泡不得偏離0.5格,每次觀測由一個測回轉到下一個測回前儀器要重新整平和對中。
(2)SX、陀螺儀、逆變器和電池要正確連接。
(3)松開管式羅盤鎖緊螺旋,將其安置在陀螺儀頂部,使羅盤體與SX望遠鏡處于同一方向線上,轉動儀器使羅盤指針處于中央位置。
(4)打開檢查開關檢查游標在零分劃線左右擺動是否對稱。
2)測前零位觀測
取下陀螺鎖緊扣,將陀螺儀鎖緊螺旋旋至自由懸掛位。
啟動檢查模式(儀器自動監測),測量結束后托起陀螺,使陀螺處于鎖緊狀態。
3)初測北方向
開啟逆變器電源,下放陀螺使游標自由擺動。
通過SX自動跟蹤逆轉點確定初北方向。
觀測結束,托起陀螺并鎖緊。
4)精測北方向
將觀測的北方向值賦值到SX上,再次下放陀螺使游標自由擺動。
用逆轉點法精確跟蹤5個逆轉點,確定北方向。
觀測結束,托起陀螺并鎖緊。
5)觀測基線陀螺方位角
(1)將觀測的北方向值賦值到SX上,轉動全站儀測量基線或定向邊的陀螺方位角。
(2)二測回測量陀螺方位角,可以測前和測后分時段觀測。
6)測后零位觀測
關閉逆變器電源進行測后零位觀測,方法同測前零位觀測。
3.3 操作要點
(1)打開和關閉陀螺之前陀螺必須鎖緊,防止懸掛帶損壞。
(2)連接和拆除電源線時陀螺必須鎖緊并將鎖緊扣罩在鎖緊螺旋上。
(3)精確測北時陀螺下放到阻尼位置時應停留10s,使游標移動平穩并限幅,再下放到自由位置。
(4)一測回結束關閉陀螺電源后應等待15min,再進行下一測回測量或拆除儀器。
4 限差及技術標準
4.1 基線點
(1)地面測定儀器常數選用地區最高等級已知邊進行,基線已知坐標方位角中誤差不超過10″[5]。
(2)井下定向邊兩端點應為永久點并成組設置,點間距不少于50m。
(3)地面控制點使用前應進行檢查。
4.2 陀螺觀測各項限差
GYROX Ⅱ自動全站式陀螺儀標稱精度為±15″。參照測量規程規定,確定各項限差如下。
(1)逆轉點個數:初測北2個,精測北5個。
(2)SX前后兩測回的方向值互差的限差為10″。
(3)逆轉點法觀測擺動中值的相鄰互差取20″,間隔互差取30″;中天法觀測相鄰時間差互差取0.4s,間隔時間差互差取0.6s。
(4)地面儀器常數互差取20″。
(5)井下定向邊陀螺方位角測回間互差取30″。
(6)相鄰逆轉點的衰減值互差取60″;間隔逆轉點衰減互差取75″。
(7)懸掛帶零位變動誤差應在±0.5格內。
5 測量成果計算
5.1 子午線收斂角
坐標方位角與地理方位角關系為A=α+γ。
1)根據高斯平面坐標解算
子午線收斂角根據安置儀器點的高斯平面坐標解算求得為
γ=k·y
(1)
式中:γ——安置儀器站子午線收斂角,符號由安置儀器點來確定;
y——儀器安置點橫坐標值;
k——系數,以縱坐標X為引數(以km計)查表即可。
2)根據經緯度解算
γ=sinB·L
(2)
式中:B——安置儀器站緯度;
L——經度差。
5.2 儀器常數
1)擺動中值平均值
一測回擺動中值平均值計算公式為
(3)
式中:NT——擺動中值平均值;
N1、N2、N3——擺動中值;
a1、a2、a3、a4、a5——5個連續跟蹤的逆轉點讀數,具體形式如圖1所示。
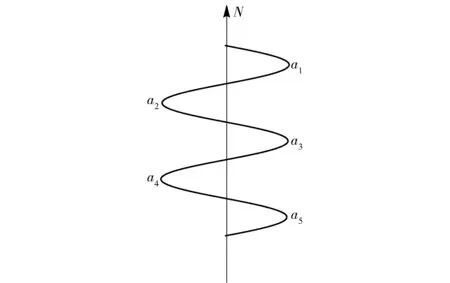
圖1 連續逆轉點
2)陀螺方位角
測線陀螺方位角計算公式為
αT=M-NT
(4)
式中:αT——測線一次測定陀螺方位角;
M——測線方向值平均值。
3)地面基線儀器常數
地面基線儀器常數計算公式為
Δ=A-αT=α+γ-αT
(5)
式中: Δ——儀器常數;
A——已知邊的地理方位角,A=α+γ;
α——已知邊的坐標方位角;
γ——已知邊測站子午線收斂角;
αT——已知邊的陀螺方位角。
5.3 定向邊坐標方位角
定向邊坐標方位角計算公式為
α′=A′-γ′=αT′-γ′+Δ
(6)
式中:A′——定向邊的地理方位角,A′=α′T+Δ;
α′——定向邊的坐標方位角;
γ′——定向邊測站子午線收斂角;
α′T——定向邊的陀螺方位角。
6 精度評定
6.1 定向邊的坐標方位角中誤差
(1)根據陀螺定向邊坐標方位角計算公式,由誤差傳播定律得出定向邊的坐標方位角中誤差的計算公式為
(7)
式中:mα——定向邊的坐標方位角中誤差;
mΔ平——已知邊測定儀器常數中誤差;
mT平——定向邊測定陀螺方位角中誤差;
mγ——定向邊測站子午線收斂角中誤差。
(2)根據多個實測資料求定向的坐標方位角中誤差。設同一臺儀器(等精度)采用相同的測量方法進行了N次定向,各次定向的精度分別為mα1、mα2、…、mαN,則定向的坐標方位角中誤差為
(8)
式中:mα平——定向邊的坐標方位角中誤差;
mαi——定向邊的坐標方位角中誤差;
N——定向邊數。
設每次定向測量儀器常數測回數為nΔ1、nΔ2、…、nΔN,定向邊測量陀螺方位角測回數分別為n1、n2、…、nN,則
(9)
式中:p——測儀器常數的權,pi=1/[nΔi*(nΔi-1)];
p′——測量定向邊的權,p′i=1/[ni*(ni-1)];
v、v′——分別為井上下陀螺方位角均值與觀測值之差。


6.2 已知邊測定儀器常數中誤差
(1)儀器常數一次測定中誤差計算為
(10)
式中:mΔ——儀器常數一次測定中誤差;
v——陀螺方位角均值與觀測值之差,vi=[αT]/nΔ-αTi;
nΔ——已知邊測量陀螺方位角測回數。

6.3 定向邊測定陀螺方位角中誤差
1)井下陀螺方位角一次測定誤差
井下陀螺方位角一次測定誤差計算公式為
(11)
式中:mT——井下陀螺方位角一次測定誤差;
d——同一邊兩次定向方位角之差;
n——差值個數,即觀測對數。
2)定向邊測定陀螺方位角中誤差
6.4 子午線收斂角誤差
因子午線收斂角中誤差mγ很小,可忽略不計。
7 贊比亞謙比希礦陀螺定向測量實例
7.1 謙比希礦井巷工程概況
Zambia Chambishi Mining位于贊比亞北部銅帶省,南緯12°40′,東經28°7′,礦區海拔標高1 240~1 320m。礦體分為主礦體、西礦體和東南礦體,主礦體開拓方式為主斜坡道(長4 600m)和豎井(深1 020m),西礦體開拓方式為中央斜坡道(長3 800m)和174斜坡道(長3 600m),東南礦體開拓方式為副井(深1 260m)和北風井(深996m)。礦井設計主礦體與西礦體之間通過300~400m水平采區斜坡道貫通,距離6 200m,需要加測陀螺邊提高導線測量精度;東南礦體兩條豎井到底后在-980m水平進風道貫通,貫通距離4 800m,豎轉平需要進行聯系測量,以使井上下采用統一的平面坐標系統。
7.2 測量方案
圖2所示為東南礦體間井與副井貫通陀螺導線圖,圖3所示為西礦體與主礦體貫通陀螺導線圖。圖2中K為根據工程計劃和施工進度確定進度確定井下巷道貫通相遇點。井下定向邊為東南礦體北風井980m水平A18—A17、副井980m水平F2—F3、主礦體400斜坡道400Z8—400Z9和西礦體300斜坡道300R7—300R5。地面基線為E09—E08-1,使用GYROX Ⅱ自動全站式陀螺儀,“3- 2- 3”觀測程序,跟蹤逆轉點法測量陀螺方位角,求算定向邊坐標方位角。
7.3 測量成果及精度評定
定向邊坐標方位角計算及精度評定見表1。

圖2 東南礦體北風井與副井貫通陀螺導線圖

圖3 西礦體與主礦體貫通陀螺導線圖
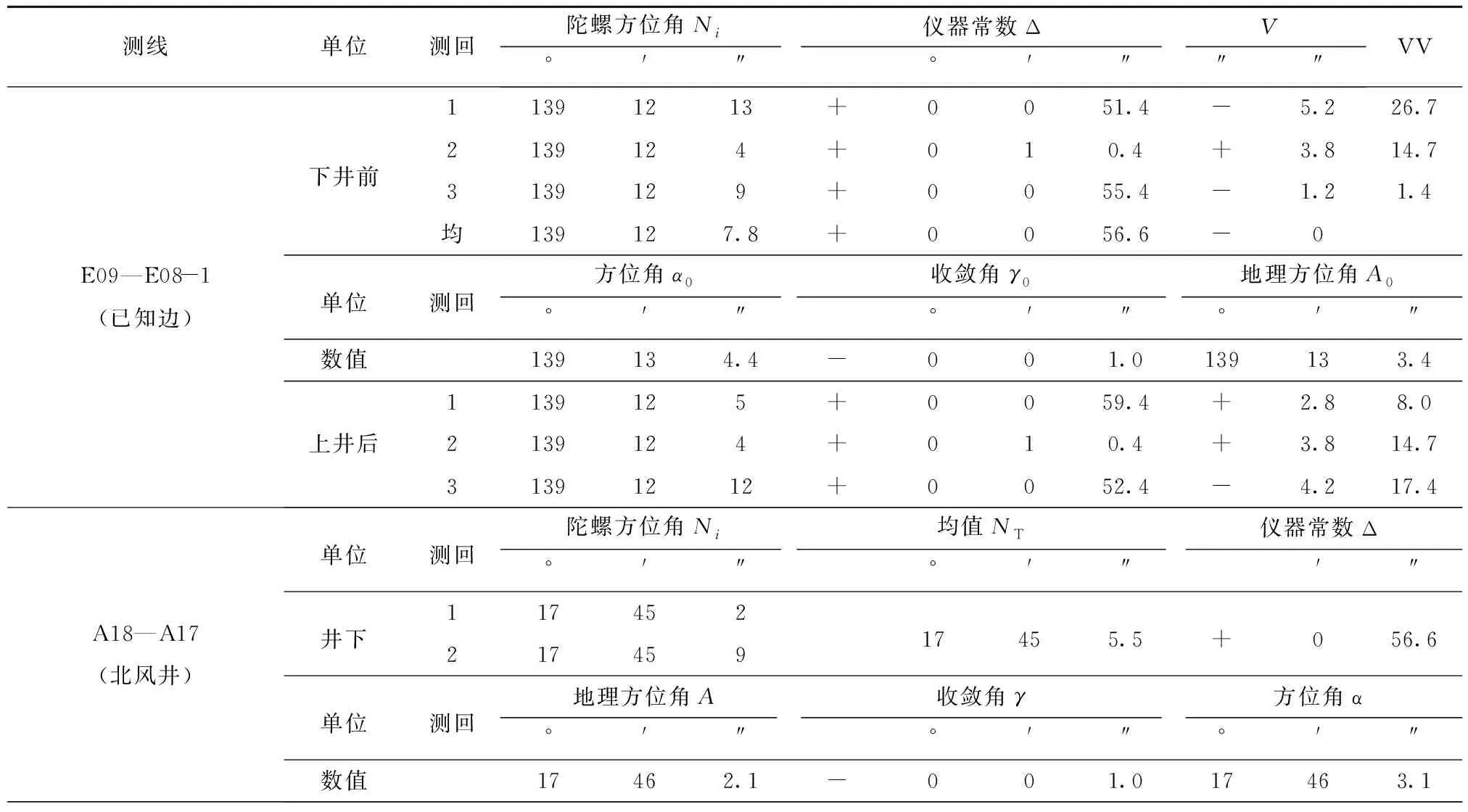
測線單位測回陀螺方位角Ni儀器常數ΔV°'″°'″″″VVE09—E08-1(已知邊)11391213+0051.4-5.226.7下井前2139124+010.4+3.814.73139129+0055.4-1.21.4均139127.8+0056.6-0單位測回方位角α0收斂角γ0地理方位角A0°'″°'″°'″數值139134.4-001.0139133.41139125+0059.4+2.88.0上井后2139124+010.4+3.814.731391212+0052.4-4.217.4A18—A17(北風井)單位測回陀螺方位角Ni均值NT儀器常數Δ°'″°'″'″井下11745217455.5+056.6217459單位測回地理方位角A收斂角γ方位角α°'″°'″°'″數值17462.1-001.017463.1

續表1
8 結語
(1)國外使用全站式陀螺儀,測量技術要求應滿足工程所在地的測繪法規的相關規定。
(2)國內外不同坐標系統計算子午線收斂角的方法有所不同,國內測站點橫坐標值應去掉帶號再減去500km。
(3)對等精度和不等精度定向測量成果應分別進行精度評定。
(4)陀螺儀的適用范圍不宜超過緯度75°,工作溫度-20~50℃,超出此范圍測量精度下降很快。
(5)GYROX Ⅱ全站式陀螺儀精度較高(±15″,0.005gon/0.074mil),陀螺定向測量技術可推廣至地下各種工程定向測量,也可從嚴規定各種限差滿足各行業高精度定向要求。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
