振鈴信號在遙測站設備維護中的應用及實現
2018-12-25 07:03:08萬韶輝
水電與抽水蓄能 2018年6期
劉 煜,鄭 嵬,萬韶輝
(中國長江電力股份有限公司,湖北省宜昌市 443133)
0 引言
三峽水情遙測系統共建設有633個遙測站,實時采集水位、流量、雨量、氣象等數據,并通過GSM/GPRS、PSTN、北斗衛星等信道發送會水情遙測中心站[1],由中心站系統軟件進行分析、評估,為運行管理人員提供決策依據,也為三峽梯級樞紐的防洪、航運、生態保護,以及水電廠生產調度等效益發揮著重要的作用。
在遙測站實際運行中,經常出現數據采集器死機、通信進程無響應或者應用程序BUG等原因導致的故障。總結分析三峽水情遙測系統歷年故障及維修記錄,發現有些故障通常通過給遙測站的數據采集器設備進行掉電,再上電的復位操作就可以解決。
目前,針對遙測站數據采集器復位操作,通常由技術人員去現場操作實現。人工操作,復雜費時,并且效率低,并且也不符合現代社會對自動化的要求。特別是,晚上遙測設備出現故障,或者位置較為偏僻的地方遙測站設備出現故障,就不能保證設備維護的及時性。
1 遙測站功能結構
三峽水情遙測系統遙測站(Remote Terminal Unit,簡稱RTU)典型功能結構如圖1所示,包括數據采集器、傳感器模塊、通信模塊,以及電源模塊等四個功能模塊[2]。

圖1 遙測站功能框圖Fig.1 RTU block diagram
數據采集器,為遙測站的“大腦”,負責遙測站數據采集、通信進程、電源控制管理,以及傳感器控制等工作,接收來自中心站的遠程命令,響應遠程召測,數據存儲、采集功能模塊定制化配置等工作。
傳感器模塊,包括流量、水位、雨量、風速、風向、溫度等傳感器,通過響應數據采集器的命令,進行數據測量,并把所采集的數據傳輸給數據采集器。
通信模塊,包括GSM/GPRS、北斗、VHF、PSTN等信道相關設備。三峽水情遙測系統遙測站主要采用GSM/GPRS為主信道,北斗信道為備用信道的雙信道冗余配置的模式,提高遙測站的信道暢通率,確保數據可以實時發送回中心站。
電源模塊,為遙測站的“動力之源”,包括蓄電池、集成接口電路板、太陽能板等,為遙測站其他所有設備提供工作電源。
總結歷年的遙測站故障維護記錄,發現有35%為應用程序故障,該類故障通過給遙測站復位操作就可以解決。如果可以遠程實現給遙測站進行復位操作,將會有效快速解決這一部分故障,從而提高設備維護的及時性,提高遙測站的可用度、暢通率等指標。
為解決上述問題,設備維護人員發現,可以利用遙測站GSM/GPRS信道[2],通過維護人員撥打遙測站電話號碼所產生的振鈴信號[3],來控制遙測站系統供電電路的通斷,實現對遙測站系統的遠程掉電/上電控制功能,從而實現對遙測站設備的遠程復位功能。該操作只需要維護人員撥打遙測站電話就可以實現,維護效率較人工去現場操作大大提高。為此,本文設計基于振鈴控制信號的振鈴控制器模塊,遠程控制遙測站復位操作。
2 振鈴控制器設計及實現
2.1 功能模塊確定
結合遙測站的功能結構,振鈴控制器的主要功能模塊包括:①振鈴信號檢測電路,用于檢測是否有振鈴信號輸入;②脈沖計數器,用于統計振鈴信道脈沖的數目,如果符合模塊設定要求,則輸出相應的掉電/上電命令;③供電控制電路,控制是否輸出受控電壓[4]。如圖2所示。
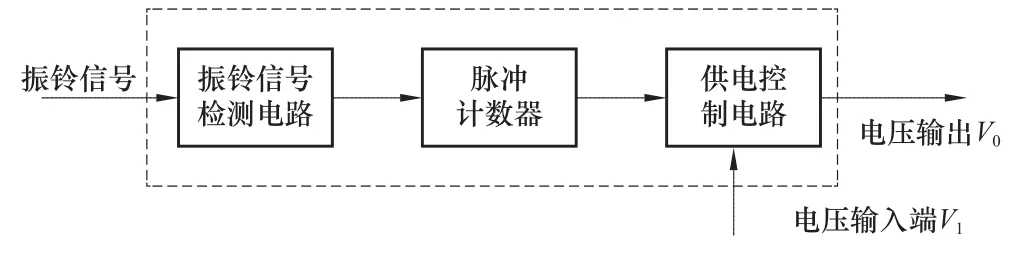
圖2 振鈴控制器功能結構圖Fig.2 Block diagram of ringing control model
2.2 功能模塊實現
2.2.1 電源控制電路
圖3為電源電路,為振鈴控制器提供工作電源,輸入電源為遙測站的工作電源VIN,線性穩壓芯片TPS71533將輸入電壓VIN轉換為振鈴控制器所需要的工作電壓VCC(+5V),為控制器的各個部分電路提供工作電源[5-7]。
2.2.2 振鈴脈沖信號生成
圖4為振鈴脈沖信號檢測電路,需要遠程控制遙測站復位操作時,振鈴檢測電路將振鈴信號的脈沖信號轉換為后續處理電路所對應電平的脈沖信號,當振鈴信號為高電平時控制三極管Q3導通,邏輯芯片74HC02的與非門電路輸入為低電平,輸出為高;相應的振鈴信號為低電平時三極管Q3截止,邏輯芯片74HC02的與非門電路輸入為高,輸出為低,以此產生于振鈴信號相對于的可檢測脈沖信號RINGOUT,同時RINGOUT經過兩級與非門電路之后驅動LED指示燈D4閃爍。
2.2.3 脈沖信號計數器
圖5為脈沖信號計數器,脈沖計數器實現對脈沖檢測電路所檢測到的振鈴信號進行計數,4路D觸發器對檢測到的振鈴信號脈沖進行計數分頻,計數到第8個脈沖信號時(本模塊設置為8,該參數可變設置),最后1路D觸發器U3B輸出Q端進行電平翻轉,輸出電壓控制信號VOUT_CTR由高變為低,關閉輸出控制電路的電壓輸出。
2.2.4 振蕩電路

圖3 電源控制電路Fig.3 Power Supply Control Circuit
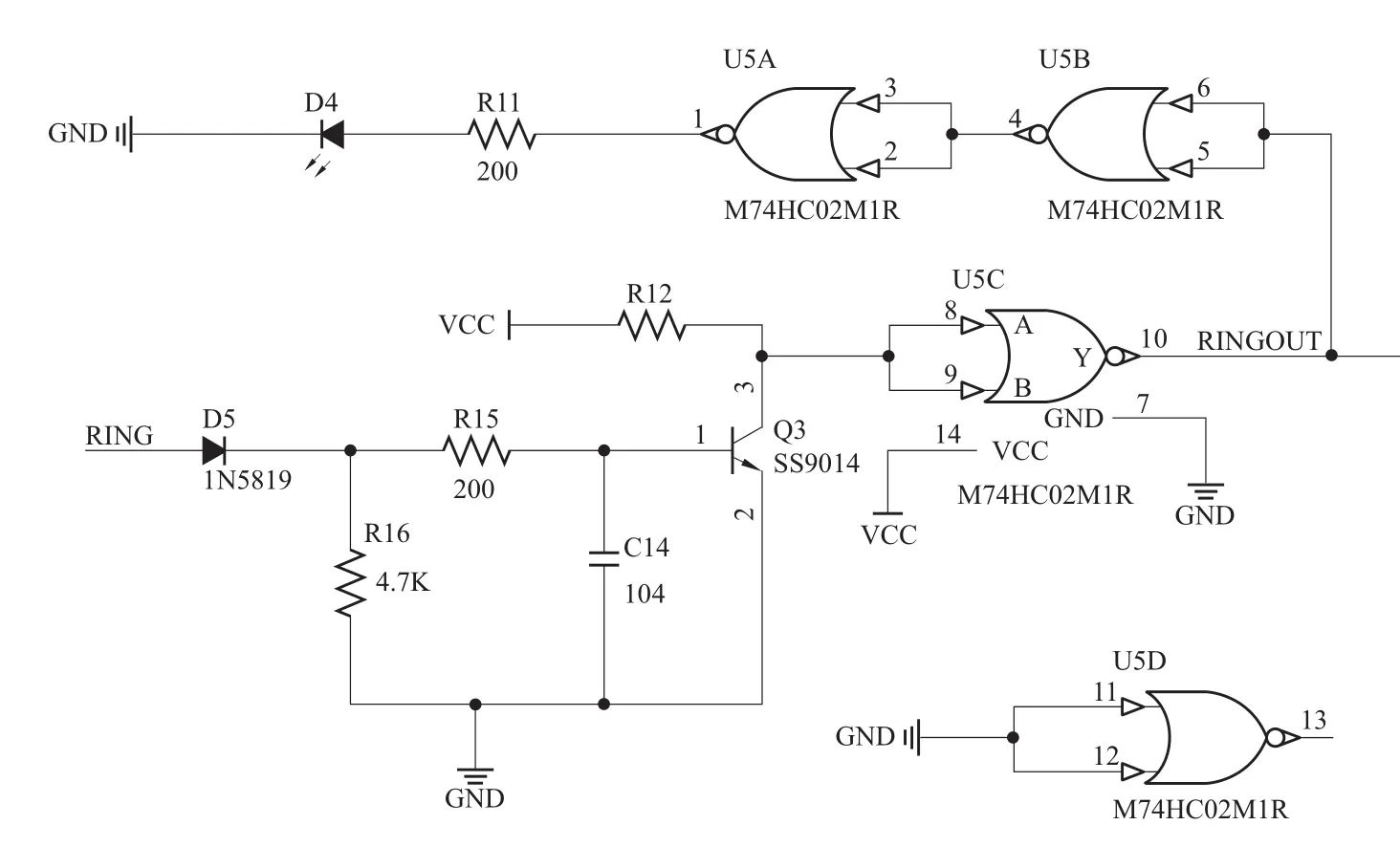
圖4 脈沖信號檢測Fig.4 Detection of pulse signal
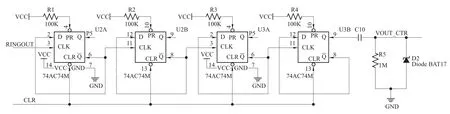
圖5 脈沖計數Fig.5 Pulse Signal Counter
圖6為振蕩電路,振蕩電路對內部振蕩信號進行計數,起延時控制功能。當振鈴信號脈沖RINGOUT存在時,U6振蕩器CD4060不停地復位操作,使得延時電路計時不停地重新開始,當最后一個脈沖信號到來后振蕩器的最后一次復位,此時振蕩器對內部振蕩信號重新開始計數,計數滿之后Q12輸出高電平(電路設計的是脈沖結束后3秒,該參數可以通過調節RC振蕩電路的參數C12和R13的阻容值大小實現時間調節),Q12輸出信號經與非門電路U4D處理之后CLR輸出為低電平,此時,D觸發器U3B的復位信號有效,輸出電壓控制信號VOUT_CTR為高電平,經與非門U4A處理后控制三極管Q2導通,場效應管Q1的柵極電平被拉低,場效應管Q1導通,電壓輸出VOUT與VIN相連,電壓輸出開啟,遙測站設備上電,實現脈沖計數之后的延時上電操作。
2.2.5 電源控制輸出
圖7為電源輸出控制電路,通過脈沖計數器輸出的控制信號實現對輸出電壓的開關控制,以此來實現遙測站的掉電上電操作。輸出電壓控制電路的輸出端VOUT接到遙測站的工作電源上,脈沖計數電路輸出的電壓控制信號VOUT_CTR為低電平時,經與非門U4A處理后控制三極管Q2導通,場效應管Q1的柵極電平被拉低,場效應管Q1導通,電壓輸出VOUT與VIN相連,電壓輸出開啟,遙測站設備上電;脈沖計數電路輸出的電壓控制信號VOUT_CTR為高電平時,經與非門U4A處理后控制三極管Q2截止,場效應管Q1的柵極電平被拉高,場效應管Q1截止,電壓輸出VOUT與VIN斷開,電壓輸出關閉,遙測站設備掉電。
2.3 振鈴控制器信號處理流程
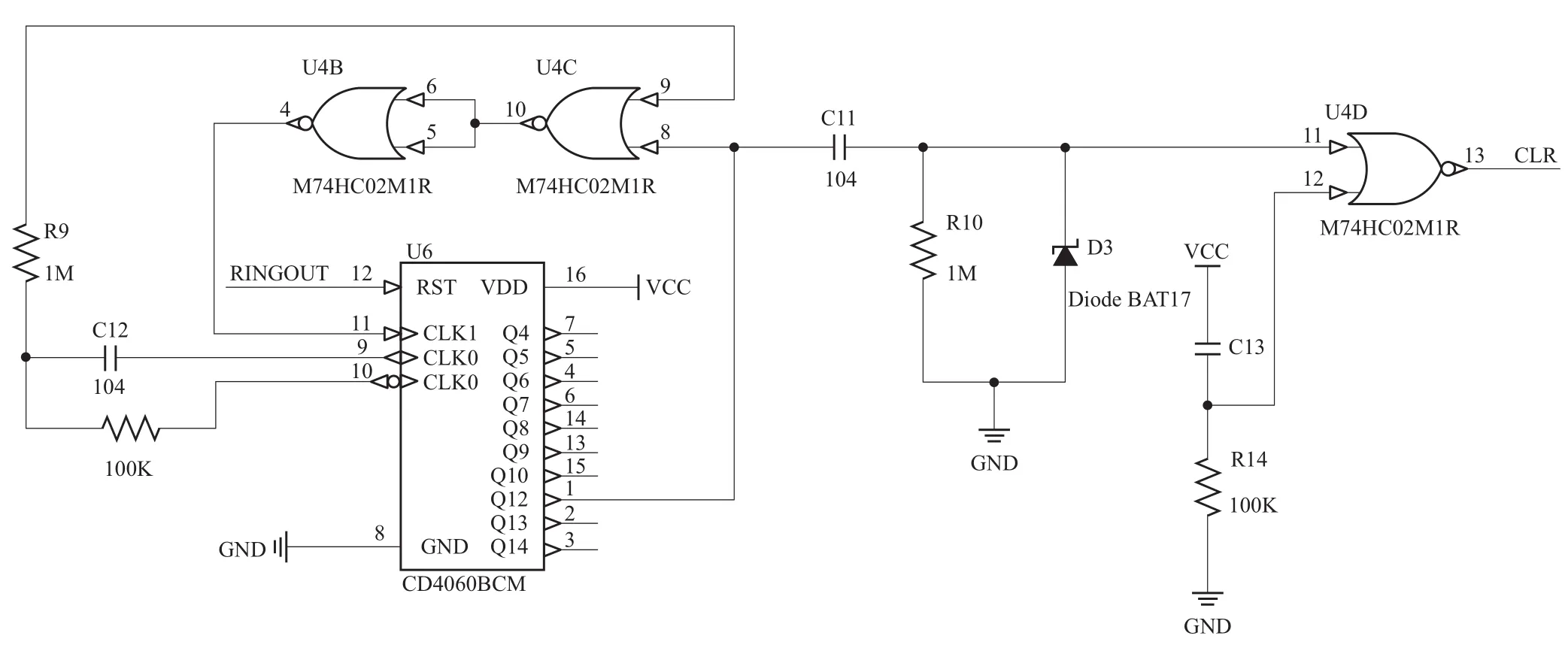
圖6 振蕩電路Fig.6 Oscillating circuit

圖7 電源輸出控制Fig.7 Output of power control
振鈴控制器,振鈴信號檢測電路不斷檢測是否有振鈴信號輸入[7,8],如果有的話,脈沖計數器則開始統計振鈴信號檢測電路所檢測到的振鈴信號,并對其進行計數,當振鈴信號次數達到電路設定值時(本振鈴控制器中設置的振鈴信號為8次),供電控制電路控制電壓輸出開關將斷開,實現斷電操作;斷開3s以后,再閉合該開關,電壓輸出端V0輸出電壓,從而實現遠程對遙測站設備的一次掉電/上電操作。
信號處理流程如圖8所示,具體步驟如下:
(1)對遙測站進行掉電/上電操作,維護人員撥打遙測站電話號碼,振鈴脈沖檢測電路檢測是否有脈沖信號(也即振鈴信號)。
(2)如果振鈴信號檢測電路檢測到振鈴信號,則執行步驟(3);如果沒有檢測到脈沖信號,則重復步驟(1)等待振鈴信號輸入。
(3)脈沖計數器清零,并開始統計振鈴信號脈沖次數。
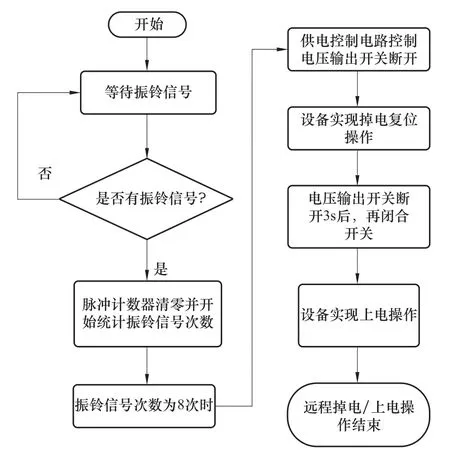
圖8 信號處理流程Fig.8 Flow chart of signal processing
(4)當振鈴信號次數達到電路設定值時,供電控制電路控制電壓輸出開關將斷開,實現斷電操作。
(5)電壓輸出開關斷開3s后,電壓輸出開關閉合,實現上電操作。
(6)遙測站遠程掉電/上電操作結束。
3 結束語
目前,該振鈴控制器模塊已經在三峽水情遙測系統中使用,在三峽水情遙測系統設備維護工作中,扮演著重要的作用,發揮良好的效益。遙測站安裝該振鈴控制器模塊后,維護人員可以更快速地處理一些遙測站故障,從而提高遙測站的暢通率和可用度。經過一年的運行及統計,2016年可用度達99.11%,較2015年提高0.2%;2016年暢通率達99.43%,較2015年提高0.3%。由于遙測站點設備故障恢復時間降低,三峽水情遙測系統暢通率和可用度顯著增長。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25