一種推土機智能安全制動控制方法
2018-12-26 01:59:02張士聰房翡翡于中有
建筑機械化 2018年11期
張士聰,房翡翡,于中有
(山推工程機械股份有限公司,山東 濟寧 272000)
1 存在問題及解決
如今,工程機械操作人員對工程機械駕駛舒適性、可靠性以及設備壽命周期提出了更高的使用要求,如果推土機制動不平穩甚至產生劇烈震動時,不僅會對推土機制動系統帶來較大沖擊,增加推土機各零部件損壞的可能性,而且會嚴重影響駕駛舒適性,增加操作人員的勞動強度。另一方面,對于靜壓驅動的設備,電磁閥是最常用的控制執行元件,而電磁閥的頻繁動作也會帶來許多隱患,比如制動電磁閥頻繁動作時,線圈會發熱、加速老化等,最后出現卡閥現象,導致無法實現制動,因此,簡單制動控制模式對特定工況的適應是不夠的。
隨著推土機電控技術和液壓技術的不斷發展,靜壓驅動推土機已經成為推土機發展的一種趨勢,目前國內靜壓驅動推土機控制系統,還處于研究起步階段,而專門針對制動控制系統的研究更是少之又少,與世界先進水平相比還有較大差距。
現有系統制動控制方式多以手柄回中位或制動踏板是否踩到底來直接判斷有無制動需求,這種制動方式的不足是:如果設置的制動延時長會造成坡道溜坡較長,如果設置的制動延時短會造成車速未降至零,導致制動沖擊。
本文提出一種智能控制方法,能夠有效解決靜壓驅動推土機現有制動系統存在的制動溜坡、制動延時長、穩定性差等缺點,并且可以減少制動電磁閥因頻繁動作帶來的發熱、磨損等影響使用壽命的問題,有效延長制動系統執行元件的使用壽命,在特定情況下還可以更迅速地響應操作者的駕駛命令,駕駛操作更流暢。
2 智能安全制動控制的三種情況
本文提出的制動控制方式包括以下3種情況。
1)坡道制動 當推土機爬坡作業并有制動需求時,由于推土機自身重力的原因會產生一個與行駛方向相反的力,這個力會使推土機出現溜坡現象,這樣會對推土機本身及周邊產生安全隱患,因此溜坡現象是應該避免的。本文提出了一種靜壓驅動推土機坡道溜坡檢測及制動的控制方法,當操作者踩下制動踏板直至最低或行走控制手柄回中位時,控制器會根據踩踏角度或者行走控制手柄位置計算出液壓泵和液壓馬達控制電流的控制值,推土機車速隨控制電流減小而降低,直至速度為零。而液壓泵和液壓馬達控制電流已經減小到最小值,即說明操作者有制動需求,此時如果控制器檢測到左右兩側馬達有速度,說明推土機有溜坡現象或有溜坡的趨勢,這樣制動電磁閥會立即斷電,實現整車液壓制動。
2)非坡道制動 當推土機在平地作業制動或在不足以造成推土機溜坡的緩坡道上作業制動時,控制器檢測不到左右兩側馬達速度值,此時控制系統會根據操作者采用的不同制動操作采取不同的控制方式。如果操作者踩下制動踏板直至最低制動時,控制器會根據踩踏角度計算出液壓泵和液壓馬達的控制電流值,推土機車速隨控制電流減小而降低,直至速度為零。控制系統認為此時的操作是短時間制動,為了使推土機可以快速響應操作者接下來的駕駛意圖,控制系統僅將推土機速度降為零,而不會觸發制動電磁閥動作;當操作者將行走控制手柄撥回中位制動時,控制系統認為此操作為非短時間制動,液壓泵和液壓馬達控制電流值會降至最小值,推土機車速會逐漸降低至零。一定時間內,如果控制系統檢測不到有其它駕駛操作,制動電磁閥會被立即觸發動作,實現整車液壓制動。
3)駐車開關急停制動 當操作者拉起駐車拉桿時,控制器輸出端口供電被切斷,控制器所有控制輸出便會被切斷,制動電磁閥立即處于制動狀態。
以上三種情況在實現制動的同時,控制器還會通過CAN總線將制動電磁閥狀態信號發送至顯示屏顯示,操作者可以直觀地了解到設備當前的制動狀態。
3 智能安全制動原理
本文提到的靜壓驅動推土機采用電控發動機,變量液壓泵、變量液壓馬達、電子制動踏板,電子控制手柄、整機智能控制器。如圖1所示,控制器接收制動踏板的制動信號及控制手柄的操作信號,并對當前液壓泵和液壓馬達的控制電流狀態進行實時檢測判斷,通過計算后輸出液壓泵和液壓馬達的降速曲線、制動信號。
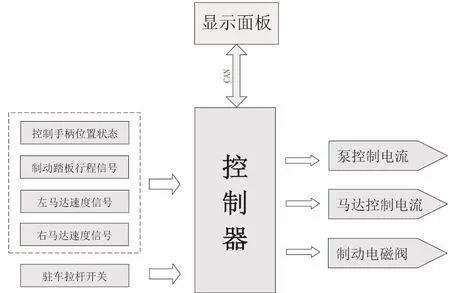
圖1 智能安全制動控制原理圖
4 智能安全制動方式實現
1)坡道制動 當操作者踩下制動踏板超過90%的行程或行走控制手柄回中位時,控制器會根據踩踏角度或者行走控制手柄位置計算出液壓泵和液壓馬達控制電流的控制值,為了保證降速制動平穩,先將馬達控制電流降至零,再將泵控制電流降至零。推土機車速隨控制電流減小而降低,直至速度為零。此時控制器通過左右馬達上的速度傳感器檢測馬達是否有速度,如果檢測到左右兩側的頻率值之和大于N(N越小越靈敏),控制系統判定推土機有溜坡現象或有溜坡的趨勢,這樣控制器輸出制動信號,制動電磁閥會立即斷電,實現整車液壓制動(圖2)。
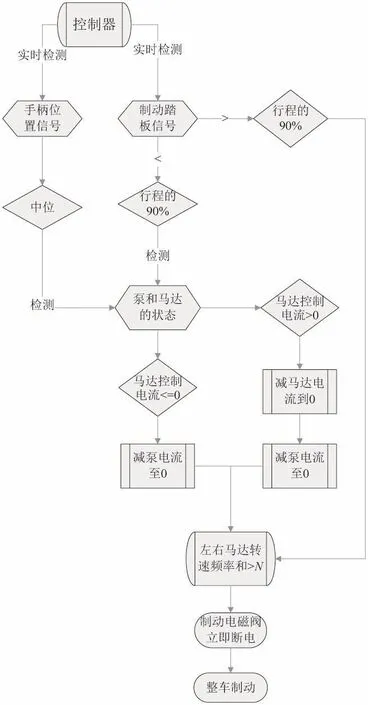
圖2 坡道制動控制系統結構原理圖
2)非坡道制動 當推土機在平地作業制動或在不足以造成推土機溜坡的緩坡道上作業制動時,控制器檢測不到左右兩側馬達速度值,此時控制系統會根據操作者采用的不同制動操作,采取不同的控制方式。控制器實時檢測行走控制手柄位置、油門踏板踩踏行程,如果操作者踩下制動踏板直至超過90%行程制動時,控制器會根據踩踏角度計算出液壓泵和液壓馬達的控制電流值,推土機車速隨控制電流減小而降低,直至速度為零。參見圖3。控制系統認為此時的操作是短時間制動,為了使推土機可以快速響應操作者接下來的駕駛意圖,控制系統僅將推土機速度降為零,而不會觸發制動電磁閥動作;當操作者將行走控制手柄撥回中位制動時,控制系統認為此操作為非短時間制動,液壓泵和液壓馬達控制電流值會降至最小值,推土機車速會逐漸降低至零。在T(T大于泵馬達控制電流降至最小值所用時間)時間內,如果控制系統檢測不到有其它駕駛操作,制動電磁閥會被立即觸發動作,實現整車液壓制動。
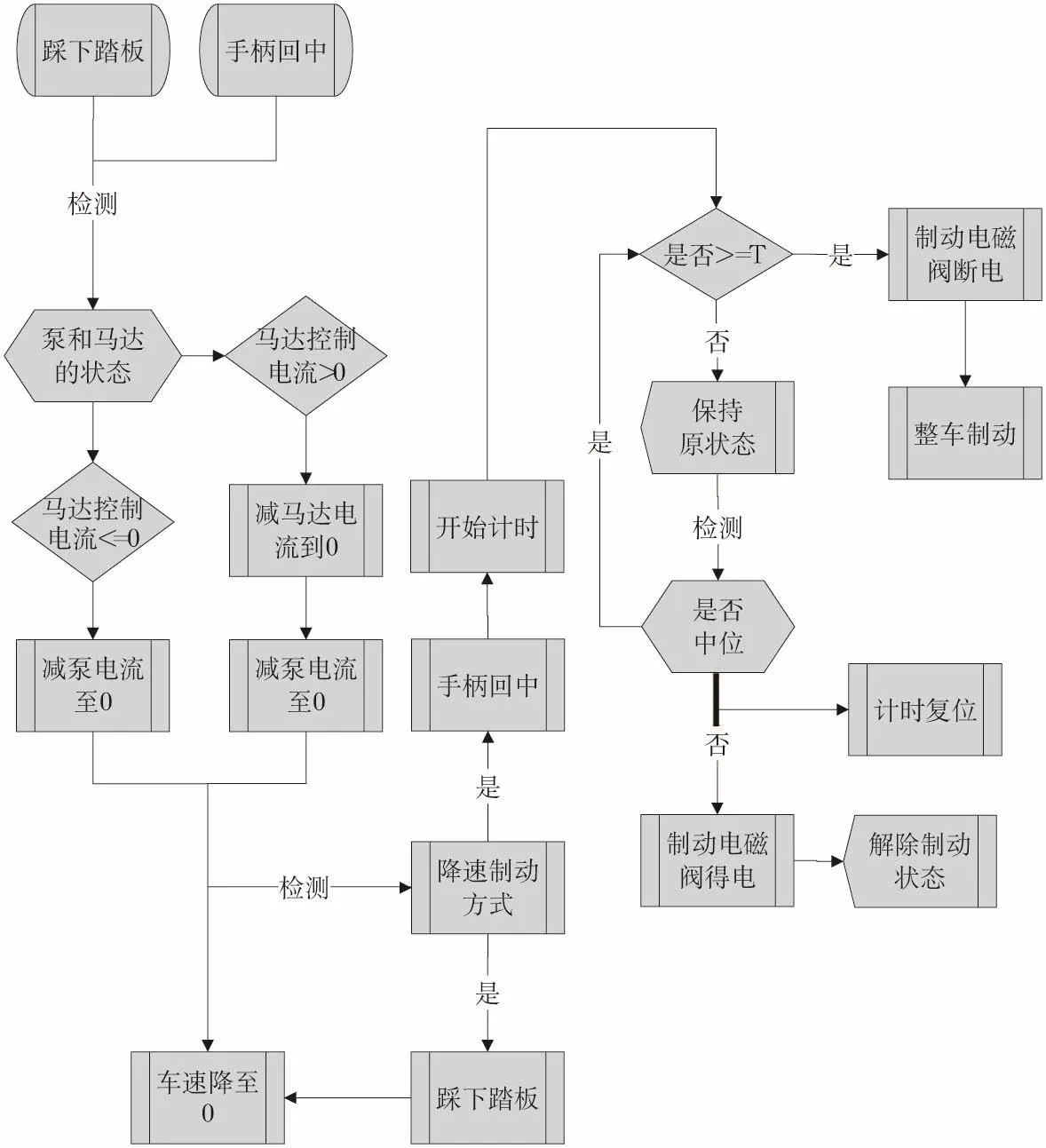
圖3 非坡道制動控制系統結構原理圖
3)急停制動 當操作者遇到緊急情況或者需要維修檢查等特殊情況,而發動機又不能停轉,這時必須使推土機絕對制動,以保證維修人員及周邊的安全。為此,我們配置了整車駐車拉桿,需要時拉起駐車拉桿,控制器所有控制輸出會被切斷,這樣制動電磁閥立即處于制動狀態,整車進入急停狀態,無論行走控制手柄或電子油門如何動作,整車都不會響應,達到雙重保護的效果。參見圖4。
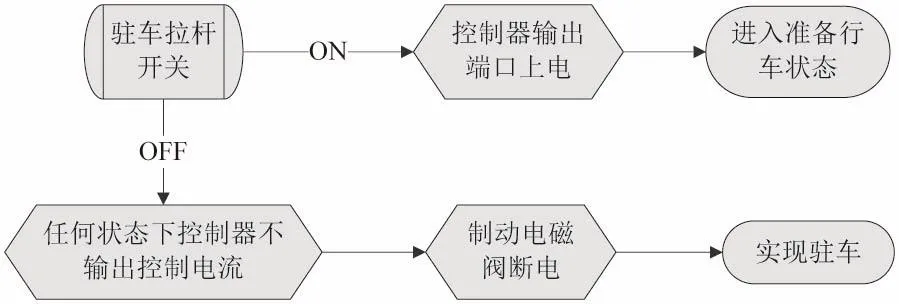
圖4 駐車拉桿開關制動結構原理圖
5 結 論
本文提出了一種推土機智能安全制動控制方法,可以提高推土機制動時的可靠性及實效性,對制動裝置產生的較大沖擊得到有效緩解并且可以有效延長其使用壽命,降低故障率;開發的溜坡自動檢測功能,提高了推土機制動控制的安全性和可靠性。
