基于慧魚創意組合模型的錢幣整理機的設計與制作
2018-12-27 02:03:14沈松琛徐伯起馬賽克
信息記錄材料 2018年1期
張 穎,沈松琛,徐伯起,陳 棟,馬賽克
(海軍航空大學 山東 煙臺 264001)
基于慧魚創意組合模型的錢幣整理機的設計與制作
張 穎,沈松琛,徐伯起,陳 棟,馬賽克
(海軍航空大學 山東 煙臺 264001)
針對每天錢幣巨大的直接交易量且人工整理錢幣效率低下的問題,提出應用慧魚創意組合模型設計并制作一款自動化設備來部分代替人工整理錢幣。利用直徑差分原理與顏色差分原理對第五套人民幣進行分類,再通過收納筒接收硬幣、機械手轉移紙幣到整理盒實現了錢幣的整理功能。
慧魚創意組合模型;自動化;ROBO Pro軟件
1 引言
慧魚創意組合模型(Fischertechink Model)誕生于德國,主要由機械構件、電器構件、傳感器、控制器和軟件組成,是一種模塊化、可拼裝、靈活、易擴充的創新實踐工具。利用這些零件可以實現無限多的組合變化,彌補傳統實驗中的缺陷,能夠完成創新構思的實現、提升的學習興趣和動手實踐能力[1]。并且,機器人教育是目前創新教育的熱點,慧魚機器人是教學機器人中應用最為廣泛的一種,慧魚機器人組件采用優質工程塑料,以“六面拼接體技術”為基礎,可以反復的拆裝,還原科學原理,展示技術模型,因此慧魚模型被諸如IBM、西門子等很多公司采用,用以驗證生產流水線[2]。
針對公共交通行業、小商品市場、銀行單位等對于現金錢幣整理效率較低的問題,利用慧魚創意組合模型,設計制作了一款錢幣整理機,來部分代替人工進行錢幣的分類、清點和整理。
2 自動化錢幣整理機功能
錢幣整理機主要完成對零散硬幣和平整紙幣的分類整理任務,減少錢幣分揀過程中人的工作量,提高分揀效率[3]。錢幣整理機(如圖1所示)通過慧魚模型搭接完成,主要利用錢幣物理特性差別,將其分類再逐一放置于指定位置。錢幣整理機采用雙層功能分區布置,下層為控制區,主要由電源、各種控制板及氣泵組成;上層為功能區,主要完成各種錢幣的分揀[4]。

圖1 錢幣整理機
在上層功能區中,同步并行完成硬幣與紙幣的分揀,功能流程如圖2所示。硬幣放入振動盒中,而紙幣放入紙幣識別槽內。啟動錢幣整理機后,通過振動盒的周期性振動使硬幣下滑進入分揀滑道中,利用硬幣直徑尺寸的物理差異性,完成不同硬幣的分類;紙幣在紙幣識別槽中,通過顏色傳感器利用顏色的差異性,對其紙幣面值進行識別,而機械手根據識別結果完成紙幣的抓取并放置到相應的整理盒內。

圖2 功能流程圖
3 硬幣整理部分的設計
3.1 硬幣特征分析
為了完成硬幣的分揀,首先對現行流通硬幣的物理特性進行分析比對(如表1所示)。在厚度方面,一角與五角的尺寸差為0.02mm,五角與一元的尺寸差為0.20mm,不同硬幣的厚度尺寸差異性太小;在硬幣重量方面,一角與五角的重量差為2.65g,一角與一元的重量差為4.95g,差異性較為明顯,但由于使用過程中的雜質沾染,硬幣重量的穩定性較差,因此不適用于分揀;在硬幣的顏色方面,一角和一元最為接近均為金屬白,五角為金黃色與其他硬幣差異較大,雖然視覺差異性明顯,但硬幣的金屬表面光滑,顏色識別器無法準確讀出有差別的數值;在硬幣的直徑尺寸方面,一角與五角的直徑差為1.50mm,一元與一角的直徑差為6.00mm,而五角與一元的直徑差為4.50mm,直徑差異均較為明顯。

表1 硬幣物理特性分析比對表
通過對硬幣厚度、重量、顏色、直徑四方面的物理特性進行分析比對,不同面值的硬幣在厚度上的差異性較小,而重量受使用過程中的雜質沾染的影響較大,因此重量穩定性較差,而顏色方面也會因使用磨損而影響辨別。綜合考慮硬幣物理特性與差異性,選取利用硬幣的直徑尺寸差異性,設計并完成不同硬幣的分揀。
3.2 硬幣分揀機構設計
3.2.1 硬幣分揀流程 根據表1中對硬幣不同物理特性的測量與分析,利用直徑差分原理,設計滑道式分揀結構,借助硬幣自重實現硬幣沿滑道的下滑。
滑道式分揀結構由兩級滑道組成:1級滑道完成一元硬幣的分揀,而五角與一角的硬幣落入2級滑道;2級滑道完成一角硬幣的分揀,而五角硬幣繼續滑行落入收納筒中。
3.2.2 硬幣分揀結構設計
(1)振動盒
振動盒通過凸輪的旋轉帶動硬幣盒周期性振動,為盒內硬幣的流出提供初始動力。
為了保證硬幣流出時不相互疊壓,因此振動盒的出口處還相應的設計了活動擋板,完成對疊壓硬幣的推平,使得硬幣逐一進入分揀滑道中。
活動擋板包含橫放擋板和斜放擋板。橫放擋板主要用于限制每次抖出的硬幣數量,斜放擋板則是防止硬幣疊壓在橫放擋板前造成硬幣卡死在出口處。
(2)分揀滑道
分揀滑道由兩側滑板及滑板中間形成的中空區兩部分組成。滑板實現對大直徑硬幣的支撐,并引導其下滑至相應的收納筒中。滑板中間形成的中空區主要實現較小直徑硬幣的拋落。
如圖3所示,在一級分揀滑道中,滑板中間形成的中空區的間距D2大于五角硬幣的直徑d五角,滑道兩側的滑板間距D1略大于一元硬幣直徑d一元,這樣能夠保證一元硬幣沿兩側滑板形成的引導路徑下滑,而一角與五角則通過滑板中間形成的中空區拋落入二級滑道。

圖3 一級分揀滑道原理示意圖
二級分揀滑道利用同樣的方法實現對一角、五角的分揀。經過反復試驗,確定分揀滑道上的滑板間距與中空區間距尺寸,實現不同面值硬幣的分揀功能。
3.2.3 撞角與收納筒 為了改變已揀出的硬幣運動方向,在各級分揀滑道末端上方設計有擋板撞角,硬幣碰上撞角后,改變其運動方向并降低速度,以便于更好地沿導路下滑至收納筒中。
收納筒用于收納已分揀出的硬幣,且收納筒上標識有刻度線,便于清點硬幣數目。
4 紙幣整理部分的設計
4.1 紙幣特征分析
現行流通紙幣共有八種面值,在沒有圖像處理的情況下,需要充分考慮其自身物理特性用于完成面值的識別。現行紙幣質地較為柔軟,不同面值的紙幣厚度近似相同,而其寬度尺寸差異小于長度尺寸差異,不同面值的色調不同且分布呈對稱性。
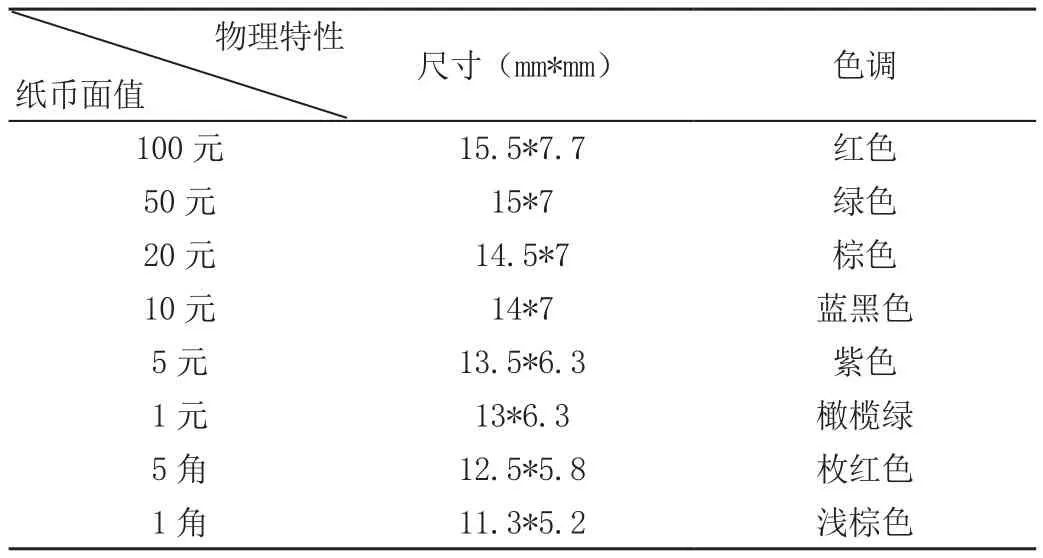
表2 紙幣實測數據
由表2紙幣特性數據可知,顏色方面的差異性比尺寸上的差異性更明顯。因此,利用對紙幣上不同位置進行顏色數值讀取,而后與程序原有數據進行比對,差別最小的一組數據所對應的就是當前紙幣的面值——這就是顏色差分原理。
4.2 紙幣分揀機構設計
4.2.1 紙幣分揀流程 平鋪的紙幣通過顏色傳感器對其特定位置進行顏色讀取,并與設置的數據進行比對,完成紙幣面值的識別。計算機通過比對完成對紙幣的面值識別后,控制機械手根據識別結果將紙幣放置于對應的整理盒中。
4.2.2 紙幣分揀結構設計及程序編制 紙幣分揀主要由紙幣識別槽、機械手和整理盒三部分組成。紙幣識別槽用于放置未分揀的紙幣,其蓋板上集合了多個顏色傳感器用于完成紙幣面值的識別,機械手主要用于紙幣的抓取和放置,而整理盒用于收納分揀后的紙幣。為了使作品結構緊湊,紙幣識別槽和整理盒以機械手為中心環形布置[6]。
(1)面值識別
作品通過顏色傳感器進行多點讀取,完成紙幣面值的識別。在識別過程中,為了提高多點識別的精度,首先要確保紙幣的放置位置。通過傾斜紙幣識別槽,使平鋪放置的紙幣依靠重力作用,自然聚于紙幣槽一側,以確保識別前紙幣的位置,為準確識別提供位置保障。
其次,利用顏色傳感器進行識別,需要消除光線的干擾。主要包括環境光線和傳感器光線兩方面的光線干擾。為了減少環境光線的影響在識別槽支架上添加了綠色補光燈;為了消除傳感器自身光線的相互干擾,顏色傳感器都放置于紙幣識別槽蓋板內槽中,并在傳感器之間用隔板進行分割,再利用黑膠帶填補空隙,阻擋光線進入其他傳感器的識別區,減少傳感器間相互影響。以此提高識別精度。如圖4所示。
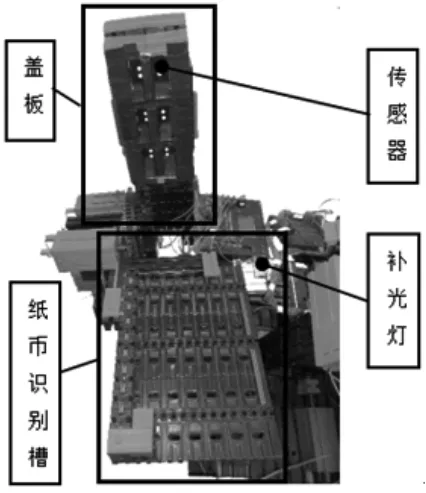
圖4 紙幣識別槽圖
(2)機械手
當傳感器將識別的數據傳入至電腦中,完成數據判斷并確定面值后,分揀機械手從紙幣槽中揀出紙幣,并放置于相應的整理盒中。
為了確保機械手每次僅揀出一張紙幣,作品利用真空吸盤進行抓取,通過反復調試確保不會吸出多張疊放的紙幣。
由于整理盒與紙幣識別槽圍繞機械手環形分布,因此分揀機械手利用齒輪轉動實現了機械手的水平轉動和空間俯仰運動,利用齒條傳動實現了機械手的伸縮運動。
(3)分揀程序
紙幣分揀程序包括復位程序、面值判斷程序、機械手運動程序。
“復位程序”是為了確保作品分揀工作開展前的初始狀態。通過對各個位置上的微動開關狀態進行檢測、復位,完成初始狀態的調整。復位完成后進入“面值判斷程序”,不管當前紙幣識別槽中是否有紙幣,面值判斷程序都會執行一遍。若沒有紙幣,則跳出主程序結束當前工作[9]。
若檢測到紙幣,面值判斷程序中通過調用差值計算子程序進行數據計算,每一個傳感器的傳回數據與程序中的原有數據相減,最后各個差值相加并和限定值比較,如果大于限定值則跳出該面值判斷程序進入下一個面值判斷程序;如果小于限定值,則機械手運動程序根據面值判讀程序的結果,控制機械手吸出紙幣并放置于相應的整理盒中,完成紙幣的分揀。過后,機械手復位,蓋板蓋下開始下一張紙幣的整理。
5 結語
作品利用直徑差分原理完成硬幣分揀,而紙幣則是利用顏色差分原理實現面值識別,錢幣整理機實現了紙幣和硬幣的同步整理,部分代替了人工。
通過該項作品的設計、結構搭接、創新調試,直至功能完善,深化了團隊成員對機電知識的理解和應用,同時動手能力、問題分析能力和解決能力都得到了充分的鍛煉和提高,并為后續創新實踐的開展奠定了基礎、積累了經驗。
[1]韓蕾,鄭軒,孫雪.慧魚創意組合模型的實踐與開發[J].機電技術,2010(05).
[2]曲凌.慧魚創意機器人設計與實踐教程[M].上海:上海交通大學出版社,2010.
[3]張繼平,宋巖.機械創新設計實驗 2009(03).
[4]曹國忠,郭海霞,檀潤華等.面向功能創新的功能進化、組合與失效研究[J].機械工程學報,2012,48(11):29-38.
TP242.2 【文獻標識碼】A 【文章編號】1009-5624(2018)01-0081-03
張穎(1983-),女,山東煙臺人,碩士研究生,工程師,研究方向:機械實驗教學及創新設計;
沈松琛(1996-),男,福建漳州人,本科生,專業:飛行器動力工程。
