采用奇異攝動裕度的三回路自動駕駛儀設(shè)計(jì)
2019-01-02 08:36:28張恒浩
兵工學(xué)報(bào) 2018年12期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
張恒浩
(中國運(yùn)載火箭技術(shù)研究院 研究發(fā)展中心, 北京 100076)
0 引言
三回路自動駕駛儀設(shè)計(jì)是飛行器控制的重要研究內(nèi)容[1-2]。傳統(tǒng)三回路自動駕駛儀可以通過設(shè)計(jì)系統(tǒng)阻尼參數(shù)和時間常數(shù),并調(diào)節(jié)開環(huán)穿越頻率實(shí)現(xiàn)對飛行器控制的快速穩(wěn)定要求[3-9]。但是現(xiàn)階段高性能飛行器設(shè)計(jì)中,要求機(jī)動性能和穩(wěn)定控制性能達(dá)到最優(yōu)匹配[10],導(dǎo)致飛行器各通道之間產(chǎn)生更高的耦合關(guān)系。傳統(tǒng)三回路自動駕駛儀在工程應(yīng)用中存在對飛行器開環(huán)穿越頻率約束不足的缺點(diǎn),同時工作時無法直接衡量評價飛行器控制系統(tǒng)的魯棒性能[11-12]。
針對上述缺點(diǎn),本文提出一種使用奇異攝動裕度的三回路自動駕駛儀設(shè)計(jì)方法。該方法將奇異攝動裕度引入三回路駕駛儀設(shè)計(jì)中,將奇異攝動裕度作為一種時域指標(biāo)[13],通過計(jì)算得到的具體穩(wěn)定裕度數(shù)值反映飛行器控制系統(tǒng)的穩(wěn)定性能。同時該方法又對自動駕駛儀進(jìn)行開環(huán)穿越的極點(diǎn)進(jìn)行設(shè)計(jì)并完成預(yù)測校正,以有效地控制系統(tǒng)的開環(huán)穿越頻率,使自動駕駛儀不再依賴閉環(huán)控制系統(tǒng)的自振蕩頻率。最后通過試驗(yàn)分析可知,本文提出的使用奇異攝動裕度的三回路自動駕駛儀方法克服了傳統(tǒng)自動駕駛儀在工程應(yīng)用上的缺點(diǎn),能夠?qū)︼w行過程中飛行器產(chǎn)生的干擾進(jìn)行快速有效控制,并通過計(jì)算得到具體的奇異攝動值,以反映飛行器控制系統(tǒng)的穩(wěn)定性能。
1 奇異攝動穩(wěn)定裕度設(shè)計(jì)
飛行器控制系統(tǒng)的設(shè)計(jì)原理如圖1所示[14-15]。圖1中,u為輸入量,y為輸出量,r為擾動量。
飛行器控制系統(tǒng)可由(1)式表示:
(1)
式中:系統(tǒng)狀態(tài)變量x為n維變量;輸入u為p維變量;輸出y為q維變量;t為時間。在本文中,飛行器控制系統(tǒng)的相關(guān)變量由向量表示。因此方程組(1)式中相關(guān)狀態(tài)變量的具體表達(dá)式[16-20]如(2)式所示:
(2)
因此飛行器控制系統(tǒng)可細(xì)化表達(dá)式如(3)式所示:
(3)
將控制系統(tǒng)的輸入u用反饋控制律u=μ(t,x)表示,(1)式可以轉(zhuǎn)化為
(4)
由(4)式組成的控制系統(tǒng)稱為標(biāo)閉環(huán)系統(tǒng)[21],在該系統(tǒng)中,x=0表示原點(diǎn),表示控制系統(tǒng)是指數(shù)穩(wěn)定的。在飛行器控制系統(tǒng)中,在每一個控制輸入量的回路中串聯(lián)接入一個對角模型的奇異攝動裕度量測器(SPMG)Δ,構(gòu)成奇異攝動閉環(huán)系統(tǒng),如圖2所示。
在圖2中,攝動裕度量測器1、攝動裕度量測器2、…、攝動裕度量測器P都是單輸出系統(tǒng),且均為指數(shù)穩(wěn)定輸出狀態(tài)。通過引入線性頂層的單輸入單輸出且滿足指數(shù)穩(wěn)定的系統(tǒng)作為SPMG的相應(yīng)對角模型Δi,飛行器控制系統(tǒng)的單通道控制回路穩(wěn)定系統(tǒng)如圖3所示,狀態(tài)方程表達(dá)式如(5)式所示。
圖3中:Af、Bf和Cf是常數(shù)矩陣,且Af是霍爾維茨矩陣;zi(t)∈DS?Rk,DS是S維數(shù)據(jù)集,Rk是高于S維數(shù)據(jù)的數(shù)據(jù)集,且i=1,2,…,m;ηi是單輸入控制系統(tǒng)的輸出量。
(5)
當(dāng)ε=0時,有(6)式成立,因此飛行器奇異攝動閉環(huán)系統(tǒng)可通過(7)式表示:
(6)
(7)

(8)
式中:AS、BS、CS均為S維變量。
(8)式中的z、AS、BS和CS分別由下列公式[23]表示:
若飛行器控制系統(tǒng)在原點(diǎn)處時是指數(shù)穩(wěn)定的,則表示飛行器控制系統(tǒng)的方程(5)式一定是穩(wěn)定的。因此一定存在正數(shù)εmax,對于小于εmax的所有正數(shù),表示飛行器奇異攝動閉環(huán)控制系統(tǒng)的方程(8)式在原點(diǎn)處一定是穩(wěn)定的。εmax稱為飛行器控制系統(tǒng)的奇異攝動裕度。當(dāng)控制系統(tǒng)的奇異攝動參數(shù)小于奇異攝動裕度時,控制系統(tǒng)一定是指數(shù)穩(wěn)定的。因此可以利用奇異攝動裕度的這一特點(diǎn)有效地跟蹤飛行器控制系統(tǒng)的魯棒性能,并對控制器進(jìn)行反饋校正。
2 三回路自動駕駛儀設(shè)計(jì)
針對傳統(tǒng)三回路自動駕駛儀在工程應(yīng)用中對開環(huán)穿越頻率約束不足,且不能有效地體現(xiàn)控制系統(tǒng)效果的問題,因此,本文在三回路自動駕駛儀中引入奇異攝動裕度計(jì)算,通過奇異攝動值準(zhǔn)確反映控制系統(tǒng)工作效果;同時設(shè)計(jì)開環(huán)穿越頻率的極點(diǎn),并采用預(yù)測校正方法控制自動駕駛儀開環(huán)穿越頻率,實(shí)現(xiàn)對飛行器工作過程中產(chǎn)生干擾的快速抑制,擺脫了自動駕駛儀對控制系統(tǒng)閉環(huán)自振頻率的依賴,可有效地對開環(huán)穿越頻率進(jìn)行約束。
2.1 飛行器模型設(shè)計(jì)
飛行器在短周期內(nèi)的縱向動力學(xué)描述如(9)式所示:
(9)
定義向量x和u用(10)式表示,則(9)式可以表示成如(11)式所示的狀態(tài)空間方程:
(10)
(11)
式中:A為狀態(tài)矩陣;B為輸入矩陣。A、B的表達(dá)式如(12)式所示:
(12)
(13)
從(13)式可知,det(PC)≠0,因此系統(tǒng)狀態(tài)完全可控,理論上飛行器系統(tǒng)可以實(shí)現(xiàn)極點(diǎn)的任意配置設(shè)計(jì),可以在控制系統(tǒng)中引入負(fù)反饋,具體的負(fù)反饋表達(dá)式為
(14)
式中:k?為俯仰角變化率控制系數(shù);kα為攻角反饋系數(shù)。
將(14)式代入(9)式中的第1個等式中,得
(15)

在三回路自動駕駛儀設(shè)計(jì)中,選用飛行器的加速度計(jì)、綜合放大器、舵機(jī)和速率陀螺等硬件產(chǎn)生的動態(tài)滯后參數(shù)作為控制系統(tǒng)的輸入量,計(jì)算控制系統(tǒng)開環(huán)控制的穿越頻率數(shù)值。本文中選用系統(tǒng)開環(huán)穿越頻率ωCR、閉環(huán)阻尼系數(shù)μ和閉環(huán)時間常數(shù)τ作為控制器的設(shè)計(jì)性能指標(biāo),計(jì)算飛行器控制系統(tǒng)的奇異攝動裕度,通過得到的奇異攝動裕度數(shù)值反映飛行器控制器性能。
2.2 開環(huán)穿越頻率極點(diǎn)設(shè)計(jì)
根據(jù)(9)式可以得到飛行器動態(tài)特性傳遞函數(shù)及對應(yīng)的系數(shù),具體計(jì)算過程為
(16)
式中:μm為最大阻尼系數(shù);ωm為飛行器固有頻率;b1、b2、k1、k2為控制系統(tǒng)推導(dǎo)系數(shù)。
將(16)式得到的相關(guān)數(shù)據(jù)代入圖4的框圖中,得到如圖5所示的三回路自動駕駛儀組成圖。圖5中,Tα表示滯后校正深度系數(shù),KR為舵機(jī)比例系數(shù)。
在圖5中的虛線處斷開控制回路,得到飛行器的開環(huán)控制傳遞函數(shù)為

(17)
為簡化(17)式,設(shè)中間變量
(18)
將(18)式代入(17)式,整理得到開環(huán)控制傳遞函數(shù)的簡化表達(dá)式為
(19)
得到(19)式后,將系統(tǒng)閉環(huán),得到閉環(huán)控制函數(shù)為
(20)
式中:KD可通過(21)式計(jì)算得到,
(21)
根據(jù)(20)式可知,閉環(huán)系統(tǒng)的3階特征方程可以用慣性特征函數(shù)和2階振蕩函數(shù)相乘組成,系統(tǒng)的閉環(huán)特征方程表達(dá)式為
(22)
式中:ω為閉環(huán)控制傳遞函數(shù)的自然頻率。
因?yàn)橄到y(tǒng)的閉環(huán)特征方程與閉環(huán)控制系統(tǒng)的傳遞函數(shù)系數(shù)是對應(yīng)相等的,所以可以得到
(23)
在工程應(yīng)用中,ω和μ是已知信息,但是閉環(huán)控制傳遞函數(shù)的自然頻率ω很難直接測得。本文涉及到工程應(yīng)用的飛行器系統(tǒng)開環(huán)的穿越頻率ωCR要遠(yuǎn)大于飛行器固有頻率ωm,因此設(shè)在開環(huán)穿越頻率處系統(tǒng)開環(huán)增益近似為1,得到
(24)
(24)式與(23)式聯(lián)立,其中τ、μ和ωCR已知,聯(lián)立的4個方程共有4個未知數(shù)ω、d0、d1和d2. 因此(23)式中ω、d0、d1和d2可解,進(jìn)而計(jì)算得到增益參數(shù)KD、KA、Ki和KR.
2.3 預(yù)測校正
開環(huán)控制函數(shù)進(jìn)行穿越頻率極點(diǎn)設(shè)計(jì)時,如果自動駕駛儀受到外界干擾影響,再加上本身硬件的動態(tài)特性可能引起的相位滯后,會嚴(yán)重影響飛行器的飛行穩(wěn)定性。為保證工作時系統(tǒng)實(shí)際開環(huán)傳遞函數(shù)的穿越頻率與設(shè)計(jì)的期望值保持一致,自動駕駛儀還必須引入預(yù)測校正,對可能引起的干擾進(jìn)行糾偏處理。
首先設(shè)系統(tǒng)工作時希望得到的開環(huán)傳遞函數(shù)穿越頻率ωD為預(yù)測校正過程中的自變量,當(dāng)ωD、τ和μ都已知后,一定會有實(shí)際工作的開環(huán)傳遞函數(shù)的穿越頻率ωR. 因此工程應(yīng)用希望得到的穿越頻率值ωD與實(shí)際得到的穿越頻率值ωR形成非線性函數(shù),
ωR=f(ωD),
(25)
故預(yù)測校正設(shè)計(jì)可以用(25)式的非線性函數(shù)相鄰2次自變量之間的關(guān)系來修正,進(jìn)而滿足開環(huán)傳遞函數(shù)的穿越頻率極點(diǎn)收斂的控制要求。
預(yù)測校正設(shè)計(jì)的具體步驟如下:
1)確定開環(huán)穿越頻率的期望值ωCR0.
2)使用開環(huán)穿越頻率變量ωD1計(jì)算工作時的實(shí)際開環(huán)穿越頻率ωR1為
ωR1=f(ωD1).
(26)
3)計(jì)算實(shí)際數(shù)據(jù)與期望數(shù)據(jù)的偏差ΔωR為
ΔωR=ωCR0-ωR1.
(27)
4)在上一次變量ωD1的基礎(chǔ)上,適當(dāng)增加微小量σ,得到新的變量ωD2為
ωD2=ωD1+σ.
(28)
5)使用ωD2,采用近似配置極點(diǎn)的方法計(jì)算得到新的實(shí)際開環(huán)穿越頻率ωR2.
6)通過步驟2~步驟5得到兩組函數(shù)數(shù)值,設(shè)計(jì)實(shí)際開環(huán)穿越頻率和期望開環(huán)穿越頻率的偏導(dǎo)數(shù)為
(29)
7)根據(jù)微積分學(xué),(29)式可以變?yōu)?/p>
(30)
(30)式移項(xiàng)可得如(31)式所示的自變量修正量ΔωD:
(31)
8)計(jì)算新的自變量預(yù)測值,新的自變量預(yù)測值計(jì)算為
ωD1(k+1)=ωD1(k)+ΔωD.
(32)
9)判斷偏差絕對值,偏差絕對值為‖ωD1(k+1)-ω1(k)‖. 當(dāng)偏差絕對值大于允許誤差ε時,轉(zhuǎn)到步驟2重新計(jì)算;當(dāng)偏差絕對值不大于允許誤差ε時,說明自動駕駛儀的開環(huán)穿越頻率趨向穩(wěn)定于期望開環(huán)穿越頻率ωCR0,此時可以求出系統(tǒng)的各增益參數(shù)和閉環(huán)自振動頻率,完成控制系統(tǒng)設(shè)計(jì)。
3 試驗(yàn)驗(yàn)證
試驗(yàn)驗(yàn)證使用某軸對稱布局的飛行器作為設(shè)計(jì)分析的研究對象。慣性器件安裝在飛行器質(zhì)心上,由于飛行器飛行時受到的空氣動力阻尼很小,忽略阻尼干擾。當(dāng)飛行器速度保持在900 m/s時,飛行器處于不同高度的動力學(xué)參數(shù)見表1.
設(shè)三自由度駕駛儀的閉環(huán)阻尼系數(shù)為0.7,系統(tǒng)閉環(huán)時間為0.3 s,工作時希望控制系統(tǒng)給出的開環(huán)穿越頻率為50 rad/s. 控制系統(tǒng)采用本文算法設(shè)計(jì)結(jié)果如表2所示。

表1 飛行器動力學(xué)特征參數(shù)

表2 控制系統(tǒng)性能指標(biāo)
圖6、圖7和圖8分別給出了飛行器在分離指令控制下三回路自動駕駛儀輸出的飛行器前向加速度、舵偏角和舵偏角速率的數(shù)據(jù)。由圖6、圖7和圖8可見,由于分離時在飛行器上產(chǎn)生相應(yīng)的分離加速度干擾,干擾方向與飛行器前向的飛行方向呈近似90°的鈍角。經(jīng)試驗(yàn)測量,在飛行器分離時產(chǎn)生的分離干擾加速度數(shù)值在5 km高度大約為6.2g,10 km高度大約為3g,15 km高度大約3.1g. 三回路自動駕駛儀控制系統(tǒng)需要對產(chǎn)生的分離干擾進(jìn)行有效抑制,確保飛行器加速過程中不失控。
控制系統(tǒng)給出的駕駛儀對應(yīng)的奇異攝動值如表3所示。根據(jù)試驗(yàn)要求,飛行器分離后加速度達(dá)到10g所需的時間在3 s內(nèi)。從圖6、圖7和圖8的試驗(yàn)結(jié)果可以看出,本文提出的采用奇異攝動裕度的三回路自動駕駛儀在不同高度環(huán)境下對飛行器都具有很好的控制性能。在整個三回路自動駕駛儀控制過程中響應(yīng)時間很快,且輸出控制量沒有超調(diào)。由于試驗(yàn)過程中系統(tǒng)使用的閉環(huán)阻尼系數(shù)和時間常數(shù)不變,飛行器在不同高度的過載加速度變化基本一致。同時由于飛行器控制效率隨高度增加而下降,隨高度的增加,飛行器控制需要更多的舵偏角裕度。同理舵偏角速率變化的控制也隨著高度的增加而需要更多的裕度。表3給出的奇異攝動值計(jì)算數(shù)值證明本文提供的三回路自動駕駛儀控制系統(tǒng)在飛行過程中能夠有效控制飛行器的飛行,證明奇異攝動值可以作為一種有效的穩(wěn)定判斷指標(biāo)應(yīng)用在飛行器控制工程中。
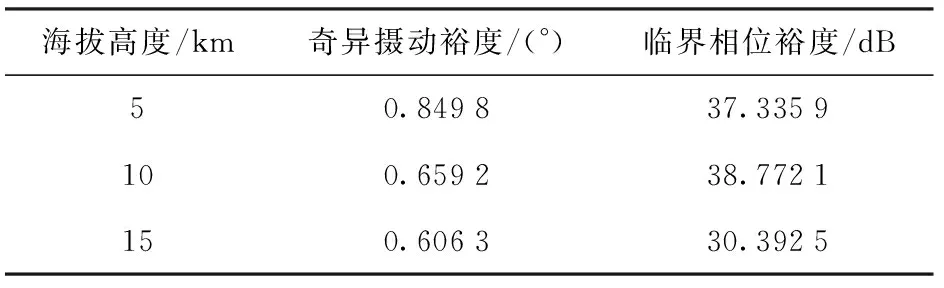
表3 駕駛儀奇異攝動值
根據(jù)表2和表3顯示的試驗(yàn)結(jié)果可知:飛行器在5 km高度飛行時,穩(wěn)定控制的幅值裕度為7.81 dB,相位裕度為37.335 9°,快速穩(wěn)定控制的收斂時間為0.177 s;飛行器在10 km高度飛行時,穩(wěn)定控制的幅值裕度為6.88 dB,相位裕度為38.772 1°,快速穩(wěn)定控制的收斂時間為0.168 s;飛行器在15 km高度飛行時,穩(wěn)定控制的幅值裕度為6.58 dB,相位裕度為30.392 5°,快速穩(wěn)定控制的收斂時間為0.165 s. 試驗(yàn)結(jié)果表明,本文提出的改進(jìn)三回路駕駛儀在不同高度都對飛行器具有良好的控制穩(wěn)定性、魯棒性和快速收斂性。
試驗(yàn)中將希望獲得的系統(tǒng)性能指標(biāo)σ以及允許誤差ε固定,對飛行器在不同高度、飛行速度為900 m/s時的控制特征點(diǎn)使用本文提出的自動駕駛儀,分析增益參數(shù)KD、KA、Ki和KR的變化。圖9是增益參數(shù)隨飛行器高度變化的示意圖。增益KD的主要作用是將輸入值和輸出值的比值保持在固定范圍內(nèi),從圖9中可以明顯看出,在海拔高度從0 km變到16 km過程中,KD變化并不明顯,最小值為1.150 8,最大值為1.342. 該結(jié)果表明了本文設(shè)計(jì)的三回路自動駕駛儀穩(wěn)態(tài)傳遞受到外界環(huán)境干擾很小,具有很好的抗干擾性能。增益KA表示飛行器的機(jī)動效率,在從低空到高空的環(huán)境過程中,飛行器的KA值先降低、后提高,表明飛行器機(jī)動效率先提升、后降低。增益Ki隨飛行器所處的海拔高度的增加而增加,可有效抑制飛行器由于高度增加而導(dǎo)致壓心前移引起的靜不穩(wěn)定問題。增益KR隨飛行器所處的海拔高度的增加而增加,可有效補(bǔ)充飛行器所處海拔高度的增加帶來的阻尼降低問題。試驗(yàn)結(jié)果表明本文提出的三回路駕駛儀具有良好的控制穩(wěn)定性、魯棒性和快速收斂性,具有一定的工程應(yīng)用價值。
4 結(jié)論
本文針對傳統(tǒng)三回路自動駕駛儀在工程應(yīng)用中對開環(huán)穿越頻率約束不足,且不能有效體現(xiàn)控制系統(tǒng)效果的問題,設(shè)計(jì)一種基于奇異攝動裕度的三回路自動駕駛儀方法。該方法將奇異攝動裕度作為有效的穩(wěn)定判斷指標(biāo),反映飛行器控制系統(tǒng)工作效果,同時對三回路自動駕駛儀進(jìn)行開環(huán)穿越頻率的極點(diǎn)配置設(shè)計(jì)和預(yù)測校正,有效控制開環(huán)穿越頻率,提高三回路駕駛儀的控制性能。試驗(yàn)結(jié)果表明,該方法克服了傳統(tǒng)三回路自動駕駛儀對開環(huán)穿越頻率約束不足,具有良好的快速收斂性能和控制穩(wěn)定性能,具有良好的工程應(yīng)用前景。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17