淺析單片機的紅外測控系統
2019-01-03 02:30:24胡銘
電子制作 2018年24期
胡銘
(安徽工業大學電氣與信息工程學院,安徽馬鞍山,243000)
近年來,一些城市將路燈作為了城市修建重要項目之一,隨著路燈數量的增加,所需電能越來越高。為了實現節能控制目標,路燈測控裝置應運而生[1]。其中,應用比較多的是紅外測控系統。本文將選取單片機作為核心控制裝置,設計一套紅外測控系統。
1 單片機與紅外測控系統相關介紹
1.1 單片機運行原理
單片機是一種在線實時控制方式,將其安裝于控制現場進行測控。該裝置自身具有較強的抗干擾能力,不易受到外界環境干擾,開發成本較低,因此,成為了眾多系統開發的首要選擇[2]。單片機又被稱作單片微控制器,將計算機系統集成到一個芯片上,開發功能強大,主要由3部分構成,包括存儲器、控制器、運算器,可以將其看作一個微控制器[3]。
在實際開發中,根據控制功能需求,利用C語言、C++等程序開發語言編寫程序,通過程序編寫來實現不同控制功能。所有編寫出的程序經過燒寫下載到單片機中,最終存儲到存儲器中,根據指令要求下達操控命令[4]。目前,應用比較多的單片機為89C51單片機,屬于通用型單片機,支持C語言、C++語言程序開發[5]。
1.2 紅外測控系統相關理論
紅外技術是一種新型檢測、跟蹤、成像等多功能綜合技術,在軍事上應用較多。經過多年發展,紅外技術發展為紅外檢測、紅外防偽、紅外理療、紅外遙感等技術,在多個領域得到了廣泛應用[6]。利用紅外傳感器采集到信號后,根據信號變化情況,采取控制處理措施,形成了基于紅外技術的測控系統,由檢測和控制兩部分組成。其中,紅外檢測部分是利用傳感器,搭建紅外傳感信息采集電路,從而實現信號采集[8]。按照功能不同,可以將紅外傳感信息采集系統劃分為5種類型:
(1)搜索與跟蹤系統。該系統主要用于跟蹤目標,可以依據監控需求設置跟蹤目標,通過分析目標運動軌跡,實時獲取目標所在地理位置。
(2)熱成像系統。根據熱效應原理生成分布圖像。
(3)輻射計。該類型信息采集系統主要用于輻射和測量光譜。
(4)混合系統。由兩個或者兩個以上不同類型系統組合而成。
(5)紅外測距。該類型系統屬于通信類系統,主要用于測量目標與參考點距離。
2 單片機紅外測控系統設計功能要求與芯片選擇
2.1 系統功能要求與構成
本文以節能燈為測控對象,采用紅外技術,設計一套單片機紅外測控系統。對于該系統功能設計要求如下:
利用紅外反射式光電傳感器采集信號,通過分析信號變化情況,判斷是否有物體從路燈下經過;利用聲音傳感器采集車輛行駛聲音信號,根據信號變化確定是否有車輛通過;利用紅外人體識別傳感器采集路人經過信號,將其作為路燈工作狀態控制主要依據。要求檢測到信號后點亮路燈,反之,延時一段時間切斷路燈線路,使得路燈線路轉為斷開狀態。另外,在電路中還要添加明暗程度檢測器件,用于檢測路燈是否發生故障,如果路燈處于故障狀態,則通過報警裝置發出警示,并鎖定故障路燈所處位置。
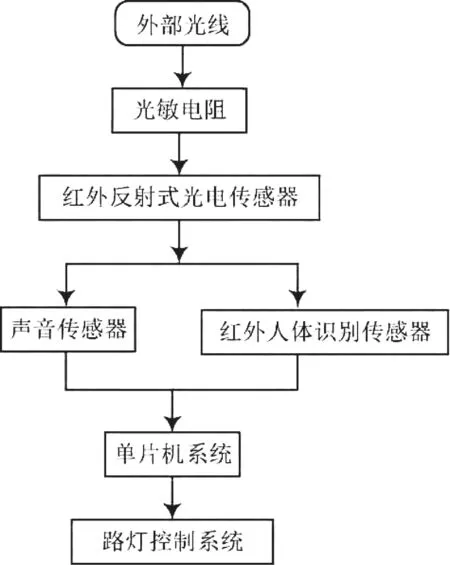
圖1 紅外測控方案結構圖
根據上述要求,設計如圖1所示的紅外測控方案結構圖。
在圖1中,系統利用光敏電阻檢測路燈是否發生故障,如果無損壞,則利用紅外反射式光電傳感器采集光纖信號,并將檢測到的信號分別經過聲音傳感器、紅外人體識別傳感器判斷信號類型,從而確定路燈下經過的是行人還是車輛,根據確定結果,利用單片機控制路燈工作狀態,實現節能照明目的。
2.2 芯片選型與功能介紹
89C51單片機是一種通用型單片機,不僅開發成本低,而且不容易受到外界干擾,由1個串行中斷、2個定時計數中斷、2個外中斷、4個8位并行輸入口組成。該裝置內部設有時鐘電路,通過外接電容和石英晶體構成。目前,89C51單片機數據采集與時間精度逐漸完善,產生的誤差在允許范圍之內,在各個領域得到了廣泛應用。因此,本文選取89C51型號單片機作為紅外測控系統核心控制器,以下為引腳功能。
根據引腳功能不同,可以將單片機引腳劃分為4種類型,包括電源、控制、時鐘、I/O引腳。
(1)電源
該芯片有兩個電源,包括VCC和VSS。前者指的是微處理器芯片電源,工作電壓為+5V,后者指的接地電源。
(2)控制
89C51單片機有4根控制線,包括ALE/PROG、PSEN、RST/VPD、EA/VPP。
②PSEN控制線:該控制線指的是外ROM讀選通信號。
③RST/VPD控制線:該控制線指的是復位/備用電源。其中,RST作為信號復位的輸入端;VPD用于連接備用電源,以免芯片VCC掉電情況。
④EA/VPP控制線:該控制線用于選擇ROM,通過程序控制EPROM。其中,EA作為內外ROM選擇端;VPP內部含有EPROM芯片,為微處理器提供編程電源。
(3)時鐘
微控制器的時鐘分為兩部分,包括XTAL1和XTAL2,前者為晶體振蕩電路反相輸入端,后者指的是電路反相輸出端。
(4)I/O引腳
該類型微處理器含有32個I/O端口,包括P0、P1、P2、P3。其中,P0口與上拉電阻連接,P3口用于輸入與輸出特殊信號,除此之外,該端口還支持控制信號的輸入與輸出。本文研究的89C51微處理器以“1”為使能端。
3 單片機紅外測控系統設計具體流程
本文選取89C51單片機作為核心控制器,利用該芯片控制路燈工作狀態,按照上述提到的系統整體設計方案結構圖,將系統劃分為硬件部分和軟件部分,分別進行設計。
我國是一個鉀肥消費大國,但資源匱乏,特別是可溶性鉀資源寶貴,讓中國不得不重視資源的有序開采。為保障我國鉀資源的可持續供應,中國工程院院士鄭綿平對我國鉀鹽行業發展提出建議,他說,“為了我國鉀鹽行業順利發展,行業應當居安思危,認真分析前進中存在的問題。我國鉀鹽可采儲量不足,分布不均,尚未找到大型可溶性固體鉀鹽礦床,枸溶性雜鹵石還未得到重視和開發。”
3.1 系統硬件設計
利用89C51單片機采集光電信號,并對這些信號進行處理,將經過處理后的信號導入執行機構中。對于芯片硬件電路連接的設計,本文是將P0、P1、P2、P3作為信號的輸出端口與輸出端口。如圖2所示為系統電路設計圖。
依據圖2的系統電路設計圖,將傳感器信號檢測與控制電路劃分為4個模塊分別進行設計,包括光敏電阻控制模塊、紅外檢測模塊、聲音檢測模塊、紅外人體識別檢測模塊。
(1)光敏電阻控制模塊
將光敏電阻的兩極與電壓兩極連接建立通路,閉合開關后電路中有電流流過,此時陽光照射到電阻上,電流隨著光照強度的變化而變化,使得光能轉換為電能。當光照強度逐漸增加時,光敏電阻將隨之改變。為了使得路燈在不同光線下均能夠根據控制需求工作,本文在設計紅外測控系統時,在電路中添加了光敏電阻器件,從而實現光電自動控制。
(2)紅外檢測模塊
本文選取LM393作為核心控制器件,利用光敏電阻R20、R21、R6采集路燈信號,在LM393控制下,將采集到的信號轉換為電信號,通過電路輸出端傳輸至89C51單片機中。
該實際運行中,利用發光二極管、激光、半導體光源產生光束,更改光束脈寬或者持續發射光束等。在系統接收端連接光電池,為其提供工作電源。為了便于擦空,本文選取接收器前端作為透鏡跟光圈布設位置。另外,光敏電阻信號接收端還與檢測端建立連接,以此達到檢測目的,并且可以將光電信號與其他信號分離。
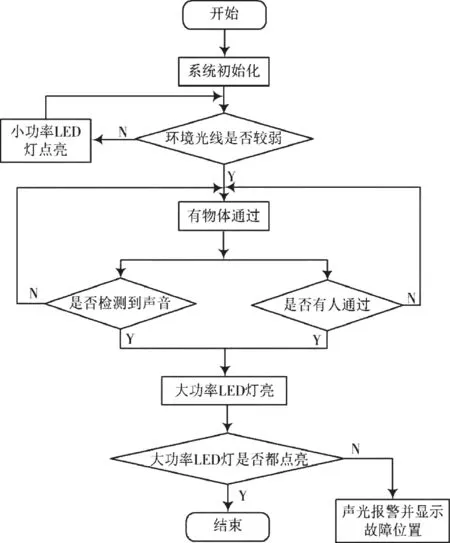
圖3 系統軟件流程圖
(3)聲音檢測模塊
該功能模塊是利用聲音傳感器采集聲音信號,通過話筒器件識別敏感聲音。如果有聲音,則話筒薄膜將震動,形成脈沖信號,使得電路中的電容發生變化,產生聲波能量電壓。通常情況下,電壓變化范圍在0至5V。生成信號經過A/D轉換后發送到信號接收端。
本文選取BR-ZS1型號傳感器作為聲音傳感器,用于檢測噪聲信號。該傳感器運行穩定,支持24小時不間斷工作。另外,該電路中還添加了報警裝置,如果噪聲超出了指定范圍,則認為此時有車經過路燈,系統在控制路燈工作狀態的同時發出警報,判定結果為有車輛經過路燈。
(4)紅外人體識別檢測模塊
人體識別傳感器規模較小,靈敏度較高,在各個領域均有所應用。在本文設計的紅外測控系統中,該傳感器主要用于人臉識別,將采集到的信號進行放大處理、經過透鏡處理,從輸出端口傳輸至系統主控端,從而獲取人臉識別信號,根據信號情況判斷是否有路人經過路燈,從而下達路燈工作控制命令。
3.2 系統軟件開發
本文利用上位PC機開發系統軟件,利用紅外傳感器采集信號,判斷信號為聲音信號還是人通過信號,下達LED路燈控制命令,從而實現紅外測控。如圖3所示的軟件流程圖。
第一步:系統初始化處理;
第二步:判斷路燈周圍環境光線是否較弱,如果較弱,則執行第三步;反之,點亮小功率LED燈;
第三步:等待物體經過紅外測控系統監控區域;
第四步:判斷信號為聲音信號還是人通過信號;
第五步:點亮大功率LED燈;
第六步:判斷大功率LED燈是否點亮,如果已經點亮,則結束此程序,開始下一次循環;反之,系統自動發出警報,通過顯示屏顯示故障位置。
4 結論
本文主要對紅外測控系統的設計展開研究,根據系統開發成本、難易程度,選取89C51單片機作為核心控制器,采用紅外傳感器采集聲音信號和光信號,根據信號變化情況,判斷路燈下是否有車輛或者路人經過,根據判斷結果控制LED路燈工作狀態。為了提高系統安全性,本文在電路中設計了安全報警電路,用于提示用戶LED路燈是否發生故障。通過本文的研究,可以實現路燈節能控制。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
