船舶電站自動調頻調載方案設計
2019-01-05 03:41:22華春梅
船舶職業教育 2018年6期
關鍵詞:船舶
華春梅
(渤海船舶職業學院,遼寧興城125105)
0 引言
隨著自動化技術的發展,船舶設備的自動化程度越來越高,其對電力供應的需求也越來越大,現代船舶對船舶電站的自動化程度及其可靠性和安全性也提出了更高的要求。[1]
船舶電站是整個船舶的重要核心之一,由原動機(柴油機)、發電機和主配電裝置組成。船舶電站自動化需具備兩個基本條件:一是發電機組的起動和停機、并車和解列、負荷分配、頻率調節等以及必要的保護功能必須實現自動控制,這是單元自動化;二是在單元自動化基礎上,各個單元按邏輯關系聯系起來,自動運行,形成船舶電站自動化系統。各個單元功能中,發電機組的頻載調節是船舶電站自動調節的重點與核心。
船舶電站并機與解列都會引起負荷變化,這不但會導致發電機的轉速與輸出功率發生變化,主電網上的頻率和電壓也會隨之改變,進而影響在網設備的正常工作。為保證船舶電站正常工作,如滿足主電網頻率恒定、各發電機組有功負載均勻分配等,船舶電站柴油機需要具備自動調速功能。由此可見,電站的頻載自動調節目標是船舶電站運行的穩定性與可靠性。
1 船舶電站電網變化規律
設發電機組轉速為額定轉速且偏差很小,額定轉速為基準值,則由能量守恒原理,發電機功率平衡方程為:
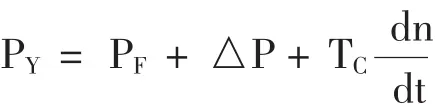
式中:PY為原動機(柴油機)的有效功率;PF為負載消耗的有效功率;△P為機電損耗;TC為發電機慣性時間常數。若原動機為柴油機,則PY決定于柴油機的供油量大小。電網負荷穩定時,轉速變化率dn/dt=0;電網負載增大,即PF突然增加時,由于柴油機功率PY不能及時增加,存在滯后現象。
由上面公式可知,為保持平衡,dn/dt<0,機組轉速降低,使電網頻率降低;同理,電網負載減小,發電機轉速增加,dn/dt>0,使電網頻率升高。這是因為PF突然減小,而柴油機功率不能及時減小,為保持平衡所致。因此電站負載變化會使電網頻率產生波動,可以在實船電站中配備調速器,使柴油機轉速穩定,以保證電網頻率穩定,在允許的范圍內變化。
2 調頻調載
船舶電站中的各發電機組并車運行,電網的功率分配是指有功功率分配(恒頻)和無功功率分配(恒壓),[2]無功功率分配通過發電機的自動調壓器的無功電流補償或者環流補償即可解決,一般不再另外配置。有功功率分配是主要研究問題。
作為原動機的柴油機均配有機械或液壓調速器,由調速器特性可知,可采用“有差特性法”調整頻率以實現有功功率的自動分配。即通過選配有差特性的調速器,使各個機組按機組容量比例承擔電網負載的變化。這種方法即為電網頻率“一次調節”。
2.1 電網頻率“二次調節”——虛有差法的調頻調載
通過上述電網頻率的“一次調節”,雖能使負荷自動按機組容量分配,但電網頻率往往產生偏離。這就需要再次對其進行調節,成為電網頻率的“二次調節”,使電網頻率保持在額定范圍內,實現有功功率的合理分配。實現方法有按負載頻率特性調節和按功率差和頻率差調節,功率差和頻率差調節即“虛有差法”。[3]“虛有差法”應用廣泛,研究的是有功功率(恒頻)分配調節,[4]系統框圖如圖1所示。
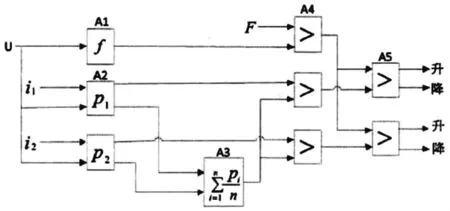
圖1 按功率差和頻率差調節系統框圖
設兩臺并車運行發電機組容量相等,U為船舶電站電網電壓,i1和i2為各發電機電流,F為電網系統頻率,取50 Hz,A1模塊計算輸出并車時各發電機組的頻率,即電網頻率,A2模塊計算輸出在網各機組功率,A3模塊計算輸出各機組平均功率,A4模塊為比較模塊。
具體工作過程是由綜合調節模塊A5計算出綜合功率差(發電機組實際功率與平均功率之差)和頻差后(電網實際頻率與設定值之差),輸出指令調節柴油機調速器的設定值,進而調節各發電機組的功率分配和電網頻率,使其保持在合適的范圍。輸出信號用于調節變頻器的設定頻率。
2.2 負荷轉移
負荷轉移也稱負載轉移,是指發電機組解列即退出并聯運行時,其承擔的功率由其余在網運行機組承擔,主開關才能分閘。在這一過程中,既要避免調整時間過長,也不能出現電網頻率波動過大的現象。否則會造成發電機組功率分配不均(有功功率),使機組過載,甚至有可能使有的分閘機組轉入電動機狀態,出現逆功率情況。這將使主開關跳閘,保護裝置發生動作。
負荷轉移方案可以借助于調頻調載方案實現。當船舶電站機組并聯運行時,如起貨機、電動錨機等負載經常變化,各柴油發電機調速器都力圖按照各自的動態特性穩定工作。由于各機組的動態特性相差較大,因此,在此過程中頻率和有功功率的分配必定不均勻,有較大變化。在負載頻繁變動的過渡期內,為避免調速器裝置頻繁動作造成振蕩和磨損,自動調頻調載裝置一般都采用延時介入。當系統穩定后,由于各機組調速器的有差特性,系統的頻率和功率分配就會出現靜差,承擔負荷轉移的自動調頻調載裝置只是在這時介入,根據這個偏差進行調整。
3自動調頻調載硬件設計
以船舶電站兩臺柴油發電機組的并車、解列為例,進行調頻調載功能設計,搭建控制平臺。上位機選用工控機,下位機選用西門子S7-300系列PLC與兩臺丹麥DEIF公司的PPU(Protection and Parallel Uni)t相結合來實現船舶電站調頻調載功能。其中S7-300PLC同時控制兩臺PPU,而每臺PPU則控制對應的柴油發電機機組。
3.1 PPU工作原理
PPU單元能夠進行發電機組同步控制、負荷轉移、調速器和自動調壓器控制開關量輸出等控制功能,還具有逆功率、過流等保護功能,同時還能夠顯示交流電所有相關監測參數等。PPU對發電機組的各項監控功能以及與PLC間的信號連接如圖2所示。
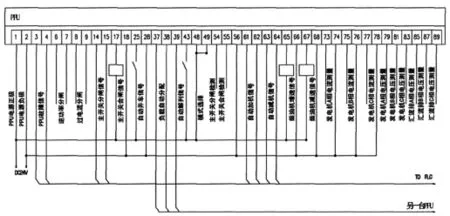
圖2 PPU信號接線圖
對于負荷轉移時易出現電網頻率波動而造成過載、逆功率等現象給電站設備造成損害的情況,設置6-9號端子接收檢測逆功率、過電流等信號,輸出分閘信號,避免電站設備損害。
并車信號由61號端子發出,同時25號端子負責接收此信號,實現自動并車及主開關自動合閘;解列時,信號由63號端子發出,同時43號端子負責接收此信號,實現自動解列和主開關自動分閘;54、55號端子反饋主開關的合閘與分閘信號,如果合閘失敗,輸出報警;船舶電站工作的自動調頻調載,實質就是發電機組的速度調節,由65-68號端子輸出調速信號給電子調速器,實現發電機組的增減速;37、39號端子為負荷分配線,實現有功負荷和無功負荷在并車時的功率均勻,在解列時進行負荷轉移。
3.2 PLC控制過程
結合PPU端子信號,設計PLC不同模塊功能,輸出響應功能信號和報警信號。圖3為PLC功能模塊接線圖。
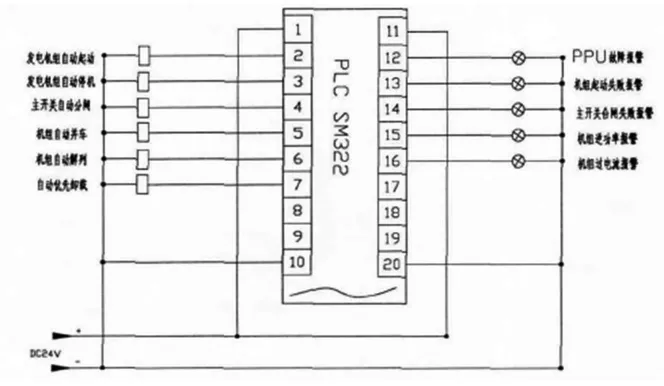
圖3 PLC信號接線圖
PLC接收PPU發出的并車信號,立刻作出相應反映。當增機待并機組處于停機狀態時,先起動待并機組,PLC接收到穩定運行反饋信號后發出自動并車信號;當增機待并機組處于穩定運行狀態,PLC直接發出自動并車信號,實現并車。需要注意的是,在并車時可能發生待并機組無法自動合閘,則需要自動優先卸載,把次要用電設備從主電網上斷開,以供主要電氣設備的正常運行,保證船舶安全運轉避免發生意外。當PLC接收到PPU的解列減機信號時,就不存在機組停機或運行狀態的檢測,PLC直接發出自動解列信號給PPU。此時的分閘信號要有一個滯后,等待負荷轉移(包括功率分配和頻率穩定) 完成后,PLC才發出自動分閘信號,使待解列機組與電網斷開,在解列機組運行一段時間后,PLC發出自動停機信號,解列機組停機。
在實現船舶自動調頻調載時,還設計有故障報警、待并機組啟動失敗報警、主開關合閘失敗報警、逆功率與過電流報警等,由PLC發出報警信號,報警指示檢查排除。
4 自動調頻調載控制流程設計
自動調頻調載控制功能的設計思想是以保證電網頻率穩定并使各個機組的負荷均勻分布為目的。自動調頻調載控制流程圖如圖4所示。其中設置死區范圍是因為船舶電網功率的絕對均勻是不可能的,過分追求這一指標會使調速開關長期反復動作,并引起振蕩。所以當功頻差在死區時,調速開關不動作;當參數超過死區范圍時,調速開關才動作。
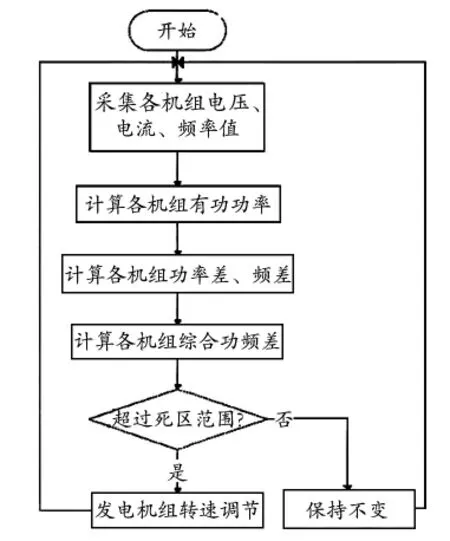
圖4 發電機組自動調頻調載控制流程
5 結論
通過對船舶電站功率分配特點以及調頻調載理論的研究,提出了應用PPU和PLC聯合控制船舶電站調頻調載的方法,設計了船舶電站自動調頻調載方案,搭建了船舶電站調頻調載控制平臺,使控制功能和顯示功能更加方便實現,使功率分配更加精準,頻率更加穩定,對實際應用具有一定參考價值。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30