虛擬車間三維監控系統研究與實現
2019-01-08 01:36:14中國電子科技集團公司第三十八研究所胡祥濤
智能制造 2018年7期
中國電子科技集團公司第三十八研究所 胡祥濤
東南大學 羅宏亮
虛擬車間三維監控系統是將虛擬現實技術應用到工業生產中的產物。本文提出了一種可行、高效的虛擬車間三維監控系統實現流程,并對其中的實現方法和關鍵技術展開詳細的研究。在相關研究的基礎上對虛擬車間三維監控系統進行設計,并詳細講解系統的實現方法。最后以車載雷達裝配線為對象,驗證本文提出的虛擬車間三維監控系統實現流程和方法的正確性、可行性。
一、簡介
虛擬車間三維監控是通過建立生產現場的三維數字化模型,用生產數據驅動數字化模型,最終實現虛實同步的監控技術。隨著建模與仿真技術、實時通信技術和Web技術的發展,虛擬監控系統逐漸興起和發展,國內外學者對其進行了相關研究和實現。在國外,Senkuvien?等提出了一種能實時監控車間狀態和加工設備的可視化方案,針對生產進度、加工過程、資源調度等進行監控,并在Stevila公司部署應用,取得了良好的效果。Zoolfakar等將仿真技術應用于生產制造過程,將研究成果開發成一個中間件,可以配合車間數據對生產進度進行仿真和監控。德國西門子公司開發了車間監控軟件Comos,可實現對生產現場的仿真、監控、場景漫游等,得到了市場的廣泛認可。美國參數技術公司(PTC)推出了物聯網平臺ThingWorx,該平臺以網頁技術為依托,具備強大的數據處理能力,開放了二次開發端口,可實現生產現場的三維可視化數字雙胞胎。在國內,常仕軍等應用甘特圖等方式對生產現場的數據進行展現。李智等對數據的采集方案進行研究,提高了數據的實時性,但展示界面還處于二維水平,缺乏真實性。柯榕等基于Unity3D平臺構建了車間三維場景,但結構相對簡單。李超等以塔式起重機為對象,建立了塔機三維模型和環境模型庫,采用DirectX設計虛擬監控系統渲染引擎,實現了三維圖形逼真顯示和人機交互功能,但該方法工作量大,可遷移性低。梁興明等通過Unity3D平臺實現了虛實融合的車間實時生產監控,但著重細節研究,系統性不足。近五年來,國內企業對虛擬監控的需求越來越強烈,但由于國內在相關方面研究尚淺,還未形成完善的整體架構和成熟的技術理論,亟需一種系統、高效、適合市場應用的虛擬監控實現流程和方法。
二、虛擬車間三維監控實現流程研究
虛擬車間三維監控是通過三維虛擬方式展示車間的實時運行狀態。運用三維建模軟件對車間設備、物料等生產要素進行三維建模,采用虛擬現實引擎進行虛擬車間的渲染與交互動作建模,最后運用數據交互技術實現虛擬場景與生產現場的實時同步,實現虛擬車間三維監控,本文提出的虛擬車間三維監控系統實現流程如圖1所示。
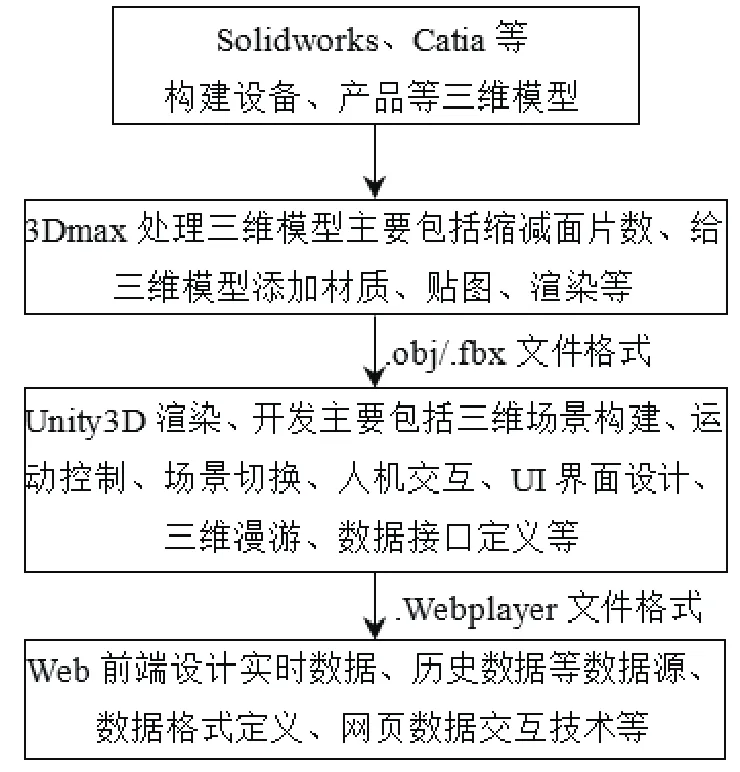
圖1 虛擬監控實現流程
1、三維模型構建
三維模型是虛擬車間三維監控系統實現的基礎。常見的三維建模軟件由CATIA、Pro/ENGINEER、SolidWorks、Maya等,它們共同的特點是利用基本的幾何元素,如球體、圓柱體、立方體等,通過拉伸、旋轉、平移以及布爾運算等幾何操作來構建復雜的幾何模型。這些三維建模軟件構建的三維模型主要側重于對象的幾何外型和各零部件之間的裝配關系等信息,與現實世界中形態各異、豐富多彩的物體還存在一定差距。
2、三維模型處理
一般來說,采用三維建模軟件構建的三維模型主要是對象的幾何外型和各部件之間的裝配關系,結構與實物相似,但視覺上與實際物體存在較大差距。為提高虛擬監控系統的真實性,需對構建的三維模型進行處理,三維模型的處理一般在3DMax進行,主要包括給模型添加材質、貼圖等操作,使三維模型具備物理屬性和紋理色彩,最終實現處理后的三維模型從物理屬性、紋理色彩、光線等與現實世界中的物體盡可能一樣。
3、三維場景構建
本文選擇Unity3D作為虛擬車間三維監控系統的開發平臺,場景是Unity3D程序的基本組成單位,場景管理主要是對場景中的模型進行組織和渲染。由于生產現場環境復雜,設備種類多樣,造成虛擬監控系統中的模型數量巨大,加大了場景管理的難度。場景的組織方式對系統后期設備的運動控制、環境渲染、三維漫游和數據源的數量和接口方式都有重要影響。本文提出采用場景樹的方式實現場景的有效管理,一個場景樹包含虛擬場景中的所有信息,既包括樹的頂點信息,也包括對象變換和渲染等信息,許多不同類型的節點按照層次結構進行排列,最終組成場景樹。通過場景樹的方式大大降低了場景管理的復雜度,為系統開發提供了便捷方法。
4、運動控制技術
運動控制技術是實現虛擬監控技術的核心。在對虛擬模型運動控制的基礎上,用生產現場的實時數據驅動模型,最終實現所有運動的虛實同步。常用的運動控制包括基本運動控制、搬運設備運動控制和機械手運動控制等。
(1)基本運動控制。
由場景樹可知,場景中的對象之間存在一定的層級關系,在Unity3D中子節點跟隨父節點進行運動,故當一個對象發生運動時,組成它的所有子節點、子子節點等都將一起發生運行。當腳本寫好后,通過拖拽方式將腳本掛在相應的對象上,就可實現該對象及其所有子對象的運動控制。
Unity3D最基本的運動是對象的移動和旋轉,通過節點層級關系、特殊插件、幾何關系計算等可實現復雜對象的復雜動作。對象移動的實現代碼如下:
實現對象在relative坐標系中移動position距離。position可為Vector3類型或float類型的一維、二維、三維值,表示對象相對于relative坐標系沿x、y、z軸的移動量。
對象旋轉的實現代碼如下:
實現對象沿relative坐標系旋轉angle角度。angle可為Vector3類型或float類型的一維、二維、三維值,表示對象相對于relative坐標系沿x、y、z軸的旋轉量。
(2)搬運設備運動控制。
搬運設備運動控制可通過基本運動控制中的移動和旋轉代碼來實現,但此方法沒有充分利用生產車間搬運設備路徑相對固定的優點,運動控制效率低且需要不斷獲取搬運設備的位置信息和轉動信息,對數據的連續性、實時性要求極大,加大了系統的運行開銷,容易造成系統卡頓問題。
DOTween是Unity3D中最常用的插件之一,在動畫制作方面具有令人折服的能力,本文提出采用DOTween插件實現搬運設備的運動控制。實現節點之間的路徑運動是DOTween插件中的路徑編輯器DOTween Path組件。
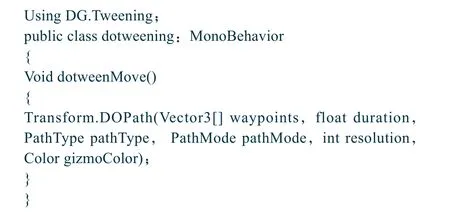
waypoints是運動路徑上各個節點的位置坐標,可以為數組,同時包括多個節點;duration是相鄰節點之間的運動時間;pathType是運動路徑的類型,包括Linear(直線)和CatmullRom(彎曲)兩種;pathMode是路徑模式,用于選擇正確的LookAt選項,包括Ignore(不動)、3D(三維模式)2D(二維模式)三種模式;resolution是路徑的分辨率,值越大越適合長彎曲路徑,默認值為10;gizmoColor是路徑的顏色,當程序運行時路徑顯示的顏色,默認是白色。
根據生產車間實際搬運設備的路線,使用DOTween插件在虛擬監控系統的對應線路上添加一定數量的節點,根據添加順序,節點將自動相聯構成一條線路,設計的線路相當于搬運設備的路徑約束,搬運設備會沿著這條路線進行運動。每個節點的位置坐標可采用腳本進行修改,即實現了搬運路徑的約束性也實現了搬運路徑的動態性。這樣可實現當搬運設備間斷地發送位置信息時,虛擬監控系統中的搬運設備仍能沿著一定的路徑和速度平滑的進行運動,既降低了系統開銷也達到了良好的展示效果。
(3)機械手運動控制。
機械手運動控制中各個關節之間的運動約束非常復雜,采用基本運動控制中的移動和旋轉代碼很難保證機器人運動的協調性和流暢性。本文提出機械手的運動控制采用添加IK插件的方式實現。IK(Inverse kinematics)即反向運動學,用子節點帶動父節點的運動,常見的IK插件包括Aim IK、Biped IK、CCD IK、FABRIK等模塊,每種IK的應用場景不同,其中CCD IK是通過不斷迭代運算求出一個近似解,來決定各層級父子關節的姿態,求解效率高、效果好,故其應用較多。
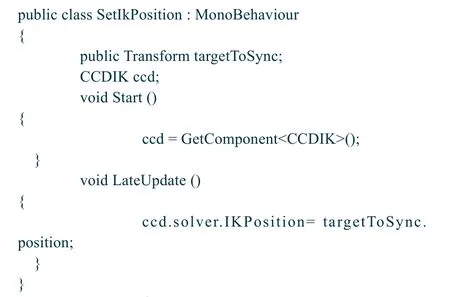
給機械手模型添加IK插件,實現通過控制機械手末端位置來保證整個機械手整體協調運動的目的,以CCD IK為例,其實現流程如圖2所示。
控制關節運動的Rotation Limit Hinge代碼是系統自帶的,用戶只需根據機械手運動的實際情況,手動調整每個關節可旋轉角度的上下限即可,在此不再累述。控制機械手末端的位置,實現整個機械手協調運動,實現代碼如下:
5、人機交互技術
人機交互技術是指通過外部硬件輸入,系統能做出相應的響應,最終實現人與計算機的信息交互,其中鼠標和鍵盤是當今最常用的人機交互輸入設備。通過人機交互技術實現虛擬車間三維監控系統的人機交互,不僅能更好地展示生產數據,還能提高人的參與度,使監控效果趨于智能化。虛擬車間三維監控系統人機交互主要是設備信息動態查看和三維場景切換兩個方面,本系統也將鼠標和鍵盤作為輸入設備。
(1)設備信息查看。
虛擬車間三維監控系統中所有設備實時狀態信息最好的查看方式是通過鼠標點擊相應設備模型彈出相應對話框進行顯示,因為這種方式簡單、直觀,符合人的主觀認知。要實現通過鼠標點擊實現設備信息的查看,首先需要虛擬監控系統能夠接收鼠標點擊事件,其次通過一定的方法得到鼠標點擊的設備,然后讀取該設備的狀態信息,最后彈出設備狀態信息窗口。
虛擬車間三維監控系統的鼠標交互操作是通過Unity3D中的輸入接口函數Input來實現,KeyCode.Mouse0代表鼠標左鍵,通過Input.GetKeyDown(KeyCode.Mouse0)實現外部鼠標點擊事件的輸入,將實現過程放入腳本自帶的Update()函數中,保證實時響應用戶的操作。
(2)三維場景切換。
人機交互模塊的三維場景切換主要包括關鍵工位三維場景的切換、生產現場多視角切換、生產現場指定路徑漫游和人員控制漫游路徑觀察四部分。這四部分涉及的技術基本相同,都是通過鼠標或鍵盤的輸入技術和相機的移動和旋轉來實現。
相機的移動、旋轉、位置和角度控制是三維場景切換效果的重要影響因素。相機的運動和旋轉操作的原理和其他對象一樣,通過Transform類的Translate和Rotate函數來實現。可在一個場景中放置多個相機,實現在界面上同時觀察多個位置的設備運行情況,與生活中車庫等監控系統的多視角同時觀察、監控效果相似。生產現場按指定路線進行漫游可通過DOTween插件實現,根據實現約定好的漫游路徑,在DOTween中拖拽式的畫出對應的漫游路徑,當需要按指定路徑進行漫游時,讓相機按照DOTween規劃的路徑進行運動即可,實現方式簡單、漫游效果好。人員控制漫游路徑進行觀察通過鍵盤或鼠標的輸入,調用Transform類的Translate和Rotate函數來實現相機為移動和旋轉,最終實現人員控制漫游路徑,可從任何位置和任何角度觀察生產現場,達到良好的人機交互效果。
6、三維場景與網頁數據交互技術
三維場景與網頁的數據交互技術主要涉及數據格式和兩者的交互方式兩方面問題。數據格式對數據交互的效率、速度、解析的難易程度都有重要影響,三維場景與網頁的數據交互是實現生產數據驅動模型運動和人機交互的基礎。
(1)數據格式。
數據格式是三維可視化插件與網頁進行數據交互首先要考慮的問題,但由于網頁與三維可視化插件在數據接口、應用環境等方面存在較大差異,數據格式的定義是兩者進行數據交互的難點。結合網頁與插件的傳輸接口、各種數據格式的特點,最終選用傳輸方便、兼容性強、直觀性強、便于解析優點的JSON字符串作為三維可視化插件與網頁數據交互的格式。
(2)函數調用。
三維可視化插件屬于網頁的嵌入模塊,作為一個相對獨立的模塊,要想實現兩者的數據交互需要一個通道,為實現三維可視化插件與網頁的雙向響應,通道要實現兩者數據和函數調用的雙向性。本文提出采用函數調用的方式實現三維可視化插件與網頁的數據交互。
三維可視化插件調用網頁中的函數。三維可視化插件調用網頁中的函數通道已經被封裝在Application類,可使用Application.ExternalCall (functionName,args)調用網頁中的函數(只用于Web Player),參數functionName表示網頁中的函數名,參數args表示傳遞的參數,支持原始的數據類型(string、int、float、char)和JSON字符串格式。這個函數調用在程序執行時不會被阻塞,即ExternalCall立即被返回而不必等待被完成,且傳遞的參數數量是可變的。
網頁調用三維可視化插件中的腳本函數。網頁調用三維插件中的腳本函數是通過SendMessage()函數實現,函數 原 型 為 SendMessage(Object,functionName,params),參數Object表示三維插件中的GameObject模型對象,參數functionName表示掛載在GameObject對象的腳本函數名,參數params表示傳遞的參數,支持原始的數據類型(string、int、float、char)和JSON字符串格式。在使用SendMessage()函數進行調用之前,必須首先使用JavaScript中對象Document的getElementById()函數來獲得Unity Web player的引用。
通過Application.ExternalCall()和getUnity().SendMessage()函數以及以上的相關規則可實現三維可視化插件與網頁之間函數的雙向調用,實現三維場景與網頁的數據交互。
三、虛擬車間三維監控系統設計
1、系統架構設計
虛擬車間三維監控系統基于B/S架構,通過實時通信服務器、歷史數據庫等數據驅動虛擬監控系統中的三維模型,在Unity3D平臺上實現三維模型與生產現場設備、物料、環境和生產進度等信息的實時同步,并保證用戶通過人機交互界面實現對設備、具體工位的查看和場景漫游功能,系統的架構如圖3所示。
虛擬車間三維監控系統的架構分為五層。
(1)物理層。物理層主要是指生產現場硬件層和數據采集系統兩部分,物理層主要負責產品的生產和裝配,也是所有生產信息的源頭。數據采集硬件將實時采集生產數據,并通過傳輸網絡實時上傳生產信息。
(2)數據層。數據是虛擬車間三維監控系統的動力。虛擬車間三維監控系統中模型的實時驅動、生產狀態信息、搬運信息、警報信息等都需要生產現場的實時數據、歷史數據和控制指令信息。通過函數調用方式以JSON數據格式完成虛擬場景與數據層數據的實時交互,驅動虛擬車間三維監控系統的運動,實現虛實同步。
(3)業務邏輯層。業務邏輯層根據生產現狀對虛擬車間三維監控系統要展示的信息進行設計,主要包括加工設備信息模塊、物流設備信息模塊、加工進度信息模塊和報警信息模塊四個方面。
(4)功能模塊層。功能模塊層主要是對虛擬車間三維監控系統人機交互功能進行設計,包括生產車間多視角切換、設備詳細信息查看、生產現場多視圖展示和場景漫游四個模塊。通過這四個功能模塊的設計,提高可視化系統的交互化控制和展示效果。
(5)界面層。界面層是虛擬車間三維監控系統的最終展示層,將生產現場的所有信息進行完全虛擬化展示,實現虛擬監控系統與生產現場實時同步。
2、功能模塊設計
結合系統展示的內容和方式,虛擬車間三維監控系統要實現生產車間的多視角切換、設備詳細信息查看、生產現場多視圖展示和場景漫游四個功能模塊。
(1)生產車間的多視角切換。
虛擬車間三維監控系統要實現生產車間的多視角切換功能。因為生產現場物理空間較大、生產設備多、加工流程多等因素,從一個固定角度很難觀察整個生產過程,為保證系統展示的全面性、完整性和效果最佳化,系統需實現從多視角觀察整個虛擬車間的生產情況。這些視角包括系統的多個全景視角和關鍵工位、關鍵設備的局部視角,工作人員通過點擊視角切換按鈕實現監控系統的視角轉換,從多方向、多角度觀察與生產現場同步的虛擬車間三維監控系統,達到了展示效果的最佳化。
(2)設備詳細信息查看。
虛擬車間三維監控系統運行時,虛擬場景中的設備會與生產現場的加工設備同步運動,主要展示的是加工過程的運動信息,而設備的詳細加工參數信息不會直接在監控系統界面上展示出來。系統需實現當用戶用鼠標點擊虛擬場景中的任意一臺設備時,彈出對話框詳細顯示此臺設備的運行數據、基礎數據等信息。
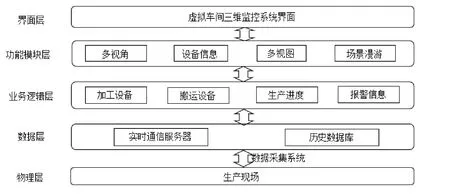
圖3 虛擬車間三維監控系統架構
(3)生產現場多視圖展示。
生產現場多視圖展示是指三維監控系統界面會同時顯示多個視圖界面。生產過程中生產關鍵信息較多,一個視角很難同時展示多個重要的實時信息,故本系統需實現同時顯示多個視圖的界面,達到多視圖、多信息同時展示的最佳效果。
(4)場景漫游。
視角展示和設備信息展示都是以固定的視角對虛擬場景進行展示,場景漫游可實現動態、多視角、移動地展示虛擬場景的實時運行信息。本系統需實現的場景漫游包括按指定路線進行漫游和人工操作進行漫游兩種方式。通過場景漫游可深入虛擬車間三維監控系統的內部進行展示,與人員進入車間現場進行觀察的效果相似,提高了展示的真實性、形象性和交互性。
四、虛擬車間三維監控系統實現
本文對虛擬車間三維監控系統的實現流程進行了詳細的分析和研究,實現了系統的場景搭建、運動控制、人機交互以及虛擬監控系統與現場生產數據的交互,但當數據進入虛擬系統后,怎樣對龐大、復雜、冗余的數據進行解析、傳輸并驅動虛擬場景中對應模型的運動仍是虛擬監控系統實現的難點。此處將從系統開發的角度以數據流向為導引,詳細講解虛擬車間三維監控系統內部數據解析、傳輸與模型驅動的實現方法。
虛擬車間三維監控系統數據獲取采用按一定頻率主動讀取的方式,通過Unity3D提供的UnityWebRequest()接口采集系統外部JSON格式生產數據,系統將數據轉換成JsonData格式,然后對數據進行解析處理,將數據根據工位進行分解、提取并在提取的數據前端添加對應工位的工位名。系統根據工位名和相應請求構成的字符串字典將相應的數據傳輸給對應工位的控制類,控制類將數據重新轉換成JSON格式,給工位的各個變量進行賦值,通過數據驅動模型運動,系統內部的數據流邏輯如圖4所示。
虛擬車間三維監控系統以工位為單位,每個工位模型都有對應的數據類和運動驅動類,數據類以一定的頻率發出數據請求指令,最后將獲取的數據傳輸到運動驅動類,運動驅動類通過數據類發來的實時數據,驅動虛擬模型的運動。
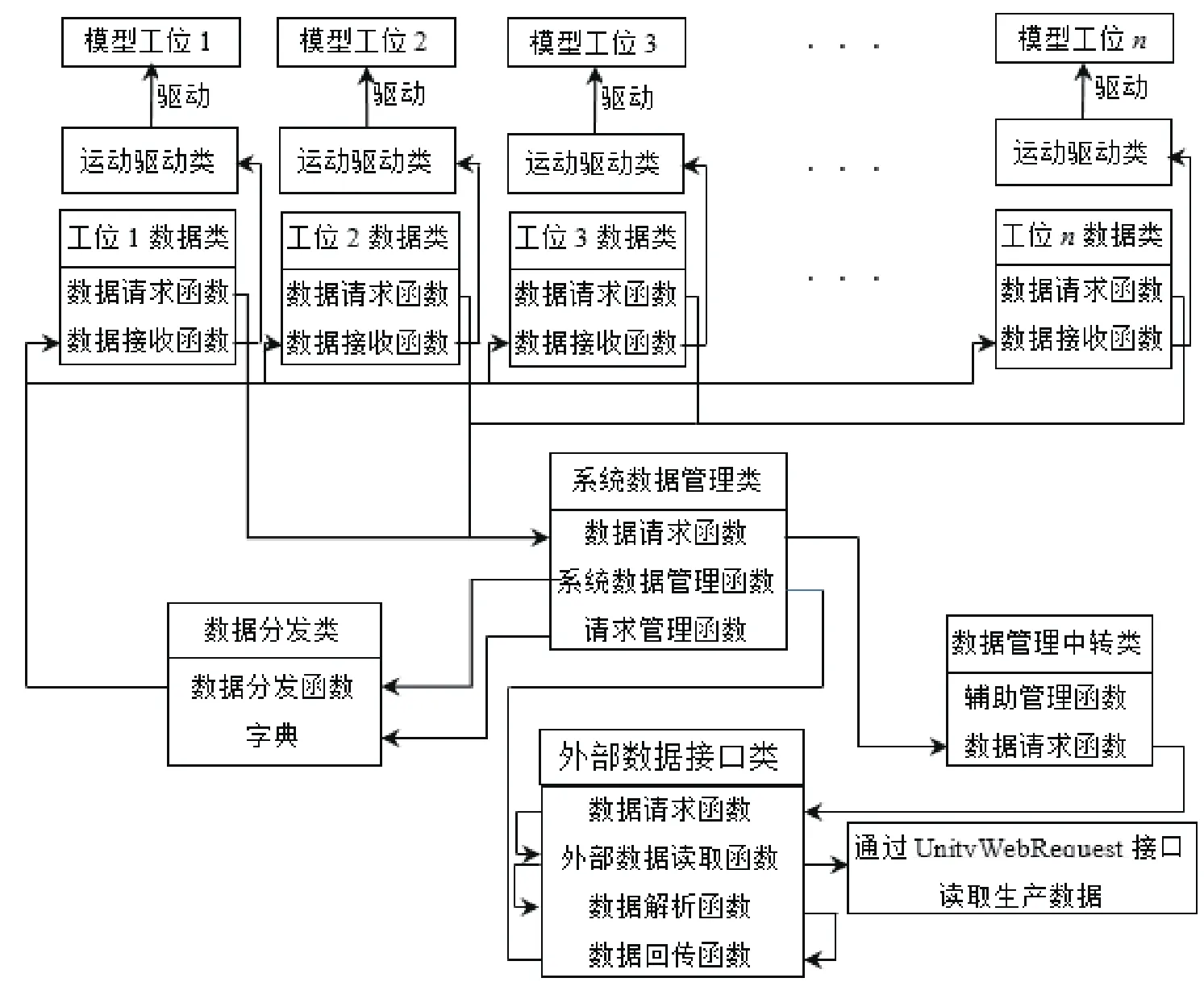
圖4 虛擬車間三維監控系統數據流邏輯圖
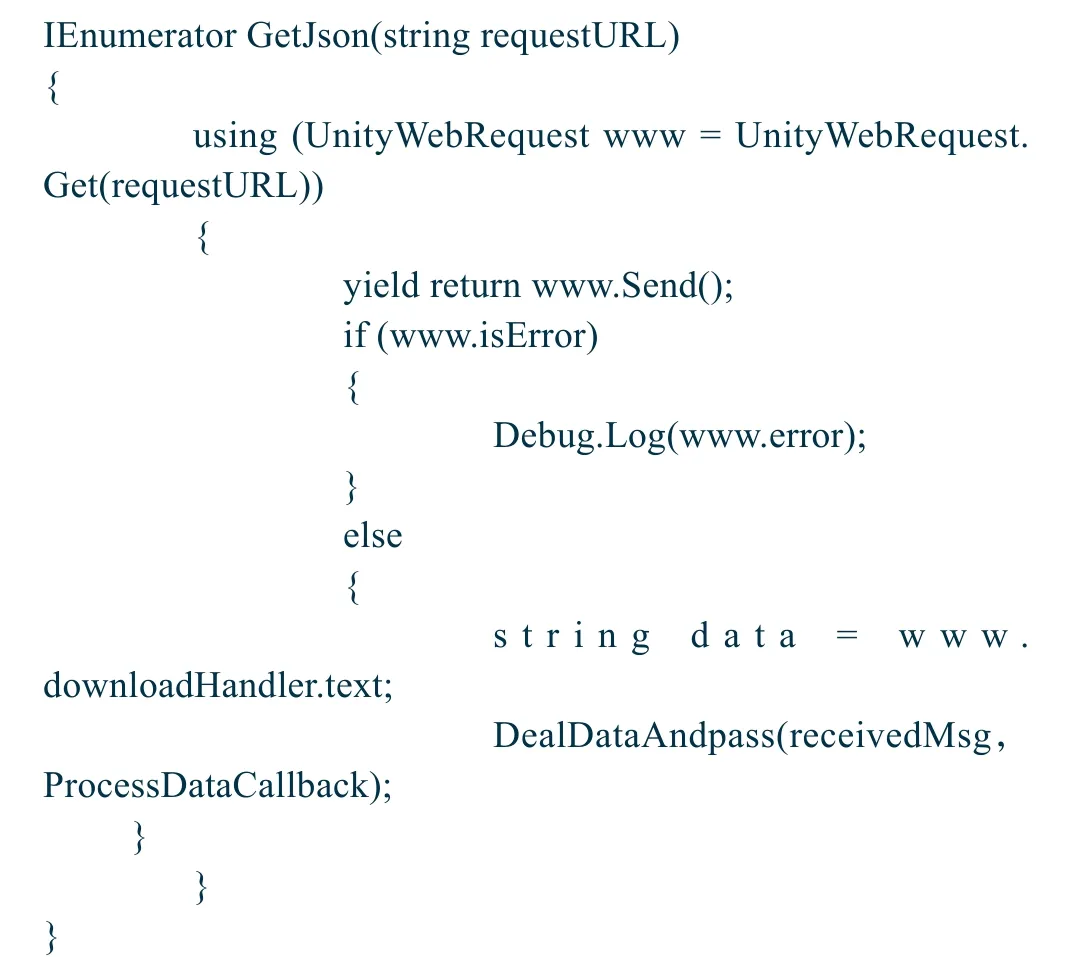
外部數據接口類中外部數據獲取函數的實現代碼如下:
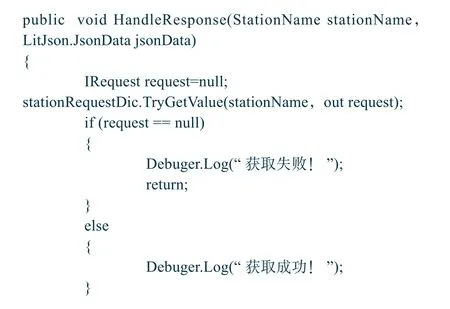
數據分發類中的數據分發函數實現代碼如下:

以上對系統內部數據流轉關鍵節點的實現過程進行了詳細闡述,加之其他輔助函數實現虛擬車間三維監控系統內部數據流的暢通,保證了系統的順利實現。
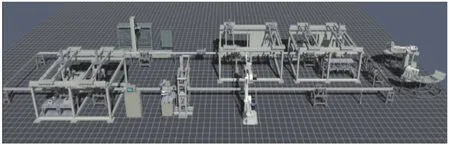
圖5 車載雷達電子裝配線虛擬車間三維監控系統
五、案例分析
以車載雷達電子裝配線為對象,驗證本文提出的虛擬車間三維監控系統實現流程的合理性、可行性和實用性。通過三維建模、模型處理、三維場景構建、運動控制、人機交互、三維場景與生產數據交互、數據解析與傳輸等技術開發了車載雷達電子裝配線虛擬車間三維監控系統。系統實現了生產車間的多視角切換、設備詳細信息查看、生產現場多視圖展示和場景漫游功能。車載雷達電子裝配線虛擬車間三維監控系統如圖5所示。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
數學物理學報(2020年2期)2020-06-02 11:29:24
中國化肥信息(2020年7期)2020-03-19 01:54:02
電子制作(2018年11期)2018-08-04 03:26:08
中國軍轉民(2017年6期)2018-01-31 02:22:28
光學精密工程(2016年6期)2016-11-07 09:07:19
工業設計(2016年12期)2016-04-16 02:52:00