基于Adams的梯形轉向運動學分析與改進設計
2019-01-08 08:17:30秦利李帥李泳嶧
機械制造與自動化 2018年6期
秦利,李帥,李泳嶧
(北京航天發射技術研究所,北京100076)
0 引言
無論是輪式車輛上的空間梯形還是普通架車上應用的平面梯形轉向機構,基本設計思路是實現阿克曼轉向。但是由于梯形機構自身的限制,其實際轉角與理想轉角之間存在一定的偏差[1]。且由于車輪是彈性體,在行進時存在跳動等因素,這也使實際轉向特性與阿克曼理論值誤差加大[2],即不可避免地會使車輪磨損加劇和行走阻力增加,出現轉向困難等不良后果。本文通過Adams對某架車梯形轉向進行運動學定量分析,提出機構改進方法并進行驗證,為設計具備轉向功能的輔助設備提供參考。
1 設備原理與問題介紹
某架車結構組成如圖 1所示。

圖1 具有梯形轉向機構的架車組成圖
轉向原理:梯形轉向機構可簡化為一個等腰梯形,即圖2所示的梯形ABCD。在牽引力的作用下,支臂繞支臂座的O點轉動,同時帶動左右兩拉桿端的B、D、E、F 4點產生位移,最終通過轉臂軸使兩車輪分別繞A、C 2點轉動,從而實現架車的轉向。架車在滿載狀態下進行人力牽引時,操作費力不易實現;機動牽引時,過小轉彎半徑易使梯形轉向發生拉桿損壞。
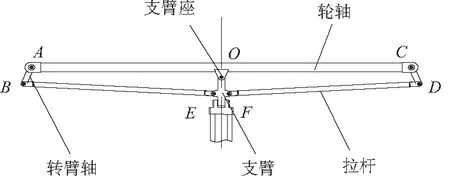
圖2 梯形機構轉向原理圖
2 Adams運動模型的建立與前處理
為驗證此平面梯形機構在架車轉向時存在的車輪側滑現象,并在其基礎上獲得滿載狀態架車轉向時的行進阻力,以驗證前文所述操作費力的問題,對其進行運動學仿真。
從三維建模軟件導入含梯形機構的架車模型至Adams中,做前處理如下:
1) 在圖2中所示各回轉點施加轉動副;
2) 在支臂與支臂座轉動副處施加隨時間變化的角速度(架車轉向時);
3) 車輪與地面設置接觸;
4) 車架上表面施加負載;
5) 在牽引臂處施加牽引力或在兩前車輪處施加行進角速度。
上述前處理的初始參數設置詳見表1,效果圖如圖3所示。
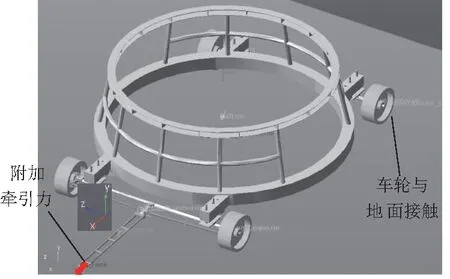
圖3 Adams運動學前處理設置圖
序號項目參數設置備注1附加牽引力(空載狀態)200 N(方向與牽引臂平行)作用在牽引臂上(車輪未施加角速度)2兩前車輪行進角速度200(°/s)牽引臂上無附加牽引力3負載1 500 kg作用在架體上表面4整車轉向速度前10 s以-2(°/s)的速度轉向后20 s以2(°/s)的速度轉向2.0d*IF(time-10:-1,1,1)5車輪與地面間接觸靜、動摩擦系數:0.3、0.1Force Exponent:2.56仿真時長與步數30 s、500/
2.1 車輪無法精確實現無側滑的仿真驗證
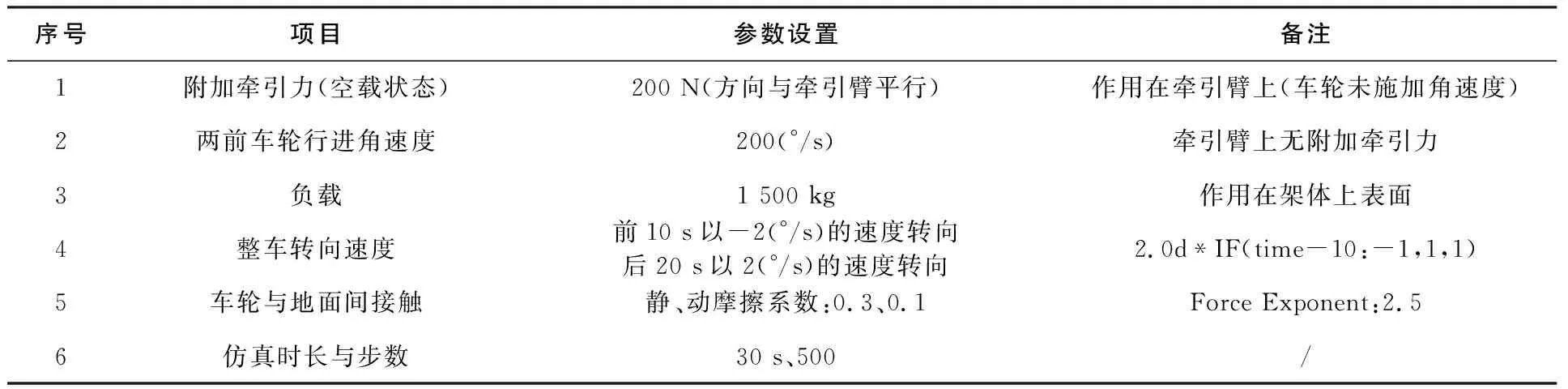
架車在無負載工況下,按表1參數(施加附加牽引力)進行設置,得到的與梯形機構相連接的兩前輪轉向角如圖4所示。
從圖4中可以看出,左右輪轉向角差值很小,最大差值在±0.3°范圍內,基于此可知:|cotαL-cotαR|≈0≠B/L=2 478/3 739=0.66。式中:B為左右車輪輪距,L為前后車輪軸距,αL、αR分別為左右車輪轉向角。
故此狀態下架車的轉向過程是伴隨著車輪的側滑而實現的,此結論與理論一致[3]。
圖4 無負載工況下左右輪轉角值對比圖
2.2 帶載工況下的轉向力
在帶載工況下,以架車勻速行進時所受的阻力作為研究對象,進行運動學仿真。
輸入條件參照表1(此時無附加牽引力),由此得到的車輪行進阻力如圖5所示(分轉向與不轉向兩種工況)。
從圖5中可以看出,帶載無轉向工況下,最大行進阻力約為480N(圖2中X與Z向的合力,下同),至多兩人即可操作;但增加2°/s的轉向角速度后,行進阻力峰值增至約1 450N,已超過3個人的操作上限。因此在帶載工況下,利用梯形機構實現轉向操作較為費力,與實際使用情況相符。
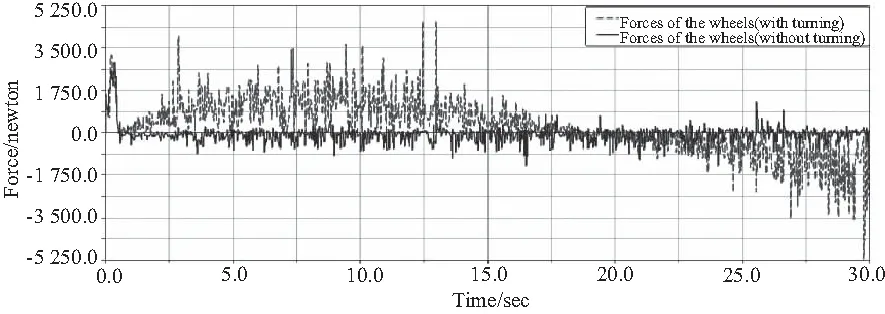
圖5 架車車輪行進阻力對比圖(梯形機構)
3 轉向機構設計改進與仿真
基于梯形機構自身結構特點存在的不足,需從本質上消除轉向時車輪側滑現象的產生,才可提高架車的可操作性。故針對設備自身結構特點,對轉向機構進行改進,其結構示意如圖6所示。圖中的回轉支承用來替換原梯形機構以實現整車轉向,與原機構相比其本質區別在于兩前輪并非與架體固連,在架車轉向過程中,前后車輪的軸線均交于一點即轉向中心處,滿足無側滑理論轉向條件。
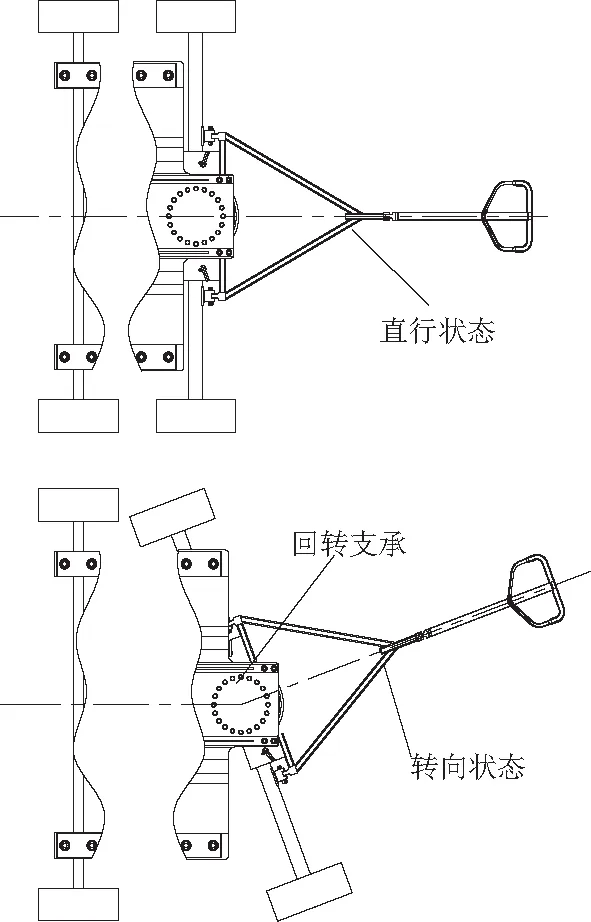
圖6 改進后的轉向機構二維示意圖
在此基礎上對此結構進行Adams動力學仿真,輸入參數同第2.2節,仿真結果如圖 7所示。可以看出在無轉向工況下,平均行進阻力與原機構相近;但在轉向工況下,其數值降低至約±600N(回轉支承的轉向速度與原梯形機構一致,即2 °/s)。故通過回轉支承實現架車轉向的方式顯著提高了設備的可操作性,優于原梯形轉向機構。
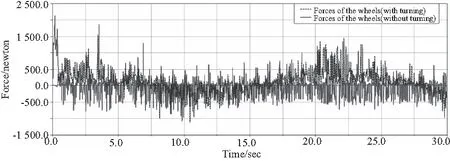
圖7 架車車輪行進阻力對比圖(回轉支承)
4 試驗驗證
4.1 試驗條件及數據
基于上述理論分析結果,通過分別具有梯形機構及回轉支承的兩臺架車,對其在轉向過程中的操作力大小進行對比試驗驗證,初始條件如下:
1) 在車架上表面分別施加相同配重(1 500kg)并緊固;
2) 在支臂與牽引臂間增加轉接件以放置機械式拉力表(量程0~10kN,引用誤差<2%F.S,使用前進行零位標校);
3) 試驗路面:水泥路面,與車輪動摩擦系數約為0.25;
4) 行進路線:在直線50m區域內繪制好架車的行進路線,架車最大轉角約20°;
5) 操作崗位人員設有:架車上的牽引臂牽拉崗4人(按實際操作情況配置)、拉力表數值攝像崗1人及技安崗1人;
6) 試驗次數:3次。
試驗參數、示意圖及結果見圖8、表2。回轉支承式架車的轉接件與拉力表安裝在圖6中所示三角架與牽引桿連接處。表 2中測得的操作力為目測所得均值。

圖8 試驗方案加載與測試示意圖(梯形機構)
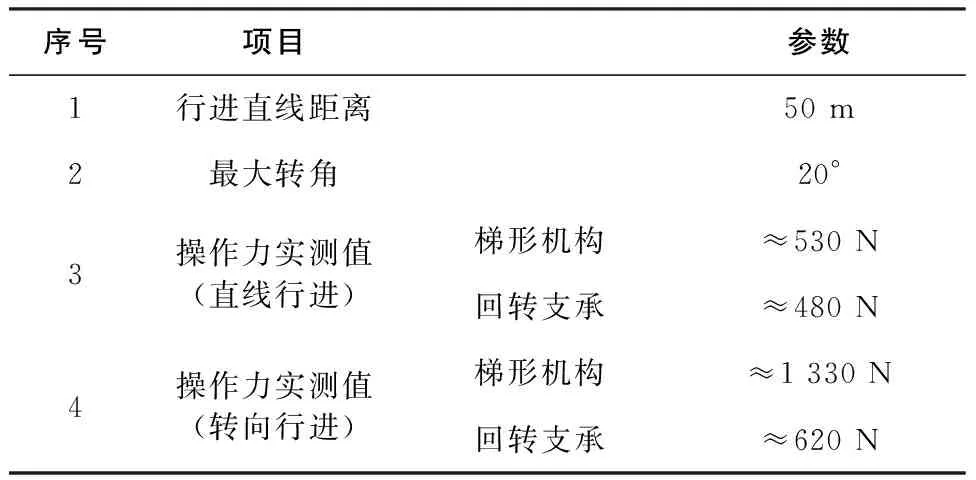
序號項目參數1行進直線距離50 m2最大轉角20°3操作力實測值(直線行進)梯形機構≈530 N回轉支承≈480 N4操作力實測值(轉向行進)梯形機構≈1 330 N回轉支承≈620 N
4.2 試驗結果分析
由于儀器自身測量誤差、路面真實條件與仿真模型存在少許出入以及人員讀數誤差等客觀因素外,可認為試驗所得數據與理論仿真一致。即與梯形機構比,回轉支承式轉向方式有效改善了人員操作力,提高了設備可操作性。
5 結語
本文以某架車在實際使用中出現的轉向操作費力為出發點,通過Adams動力學仿真,對比分析梯形機構與回轉支承兩種轉向方式在直行及轉向時的理論操作力大小,得出與回轉支承相比,梯形機構自身結構不具備改善轉向操作力的條件,最后通過試驗驗證了理論分析的正確性。
事實上能否應用回轉支承式轉向,與設備構成和功能有較大關系,在方案設計時應進行充分考慮。在復雜的工程汽車領域如何合理設置轉向梯形參數或設計轉向機構,從而提高車輛的轉向靈敏度并減小至不足轉向量,仍一直是人們研究的重點[4]。
