混凝土噴漿車臂架抑振控制研究與應用
2019-01-09 07:48:30萬林林曹希龍張淑君張衛國何繼盛李明明
建筑機械化 2018年12期
關鍵詞:混凝土
萬林林,曹希龍,張淑君,張衛國,何繼盛,李明明
(徐州徐工施維英機械有限公司,江蘇 徐州 221004)
混凝土噴漿車是一種隧道支護混凝土噴漿作業的專用設備。它主要應用于公路鐵路隧道、地鐵、礦山巷道等領域。噴漿車在施工過程中仍存在臂架晃動量大,操作手操作體驗差等缺陷,造成噴漿作業噴頭定位精準度差,進而導致噴漿混凝土表面平整度差。如何減少臂架晃動量,降低現場操作難度,提高噴漿作業時噴頭定位精度,成為近年來混凝土噴漿車升級的關鍵技術。
1 噴漿車臂架控制工作原理
目前,行業內混凝土噴漿車臂架作業由轉臺回轉、臂架變幅、臂架伸縮、末端噴頭旋轉等配合完成。這種結構方式既能夠單獨運行動作又能同時組合運行動作,能最大限度增加臂架展開自由度,增加狹小空間內作業面積。噴漿車結構如圖1所示。
臂架控制系統由依次連接的液壓油缸、油路管、電液比例閥、控制器、遙控器組成。總線型遙控器通過CAN網絡發送手柄控制信號至控制器,控制器采用可控的PWM(脈寬調制)技術,電路中輸出可變的開關電壓,來驅動電液比例閥閥芯位移,從而控制液壓油路的流量和壓力,液壓油缸驅動臂架動作。
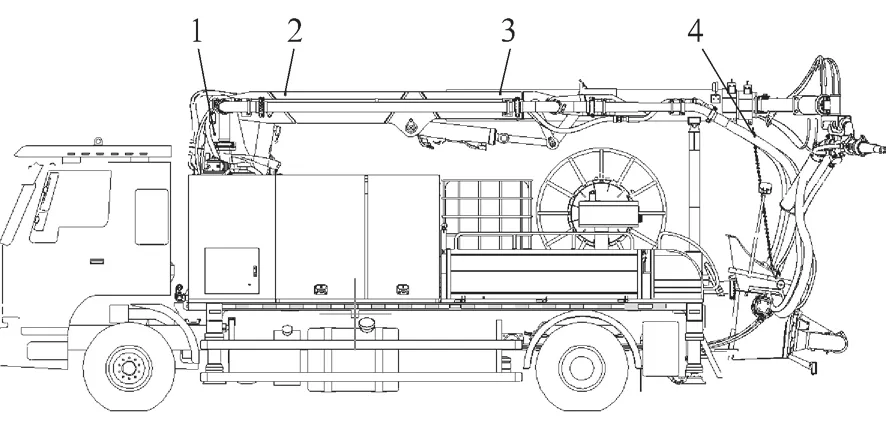
圖1 混凝土噴漿車結構圖
2 臂架振動原因分析
噴漿車臂架展開后的縱向變幅、橫向回轉是一種較大的慣性系統。在啟動、制動過程中負載及本身慣性沖擊會對臂架產生較大沖擊,從而產生晃動。
再者,噴漿車臂架帶有伸縮功能,臂架需要用柔性的混凝土輸送管和氣路軟管進行連接。在臂架啟動和停止時,剛性臂架運動帶動柔性管路運動。在現有技術條件下,柔性的軟管無法替代,臂架啟動停止時,應盡量減少軟管對臂架的慣性拖拉作用,以降低、消除其對臂架平穩性的影響。
在啟動、制動階段抑制慣性參量加速時間可以有效抑制臂架晃動。在不改變臂架結構及液壓系統下選用合理的控制策略,可以在一定程度上彌補機械的性能缺失造成的臂架晃動的現象。
3 抑振原理及策略
遙控手柄開度值與控制器PWM端口輸出成一定的比例關系。電液比例閥閥芯位置基于PWM原理控制,一旦閥芯到達位置,脈寬調制結束,閥芯位置鎖定。假設忽略比例閥響應遲滯,理想狀態下,臂架油缸伸縮速度與手柄操作速度成一定比例關系。如圖2所示。遙控手柄幅度與控制器輸出對應關系,如圖3所示。在t1、t2階段由于時間較短,這一階段變化過程可看成階躍響應,遙控手柄從零位至滿行程,速度越快臂架晃動量越大。通過測量臂架速度及振動量,發現加速度越大帶來臂架晃動沖擊越大。在某個加速區間內,臂架動作即能滿足工況要求,在此區間內臂架具有較好的平順性。臂架油缸平均速度與臂架晃動振幅關系如表1所示。
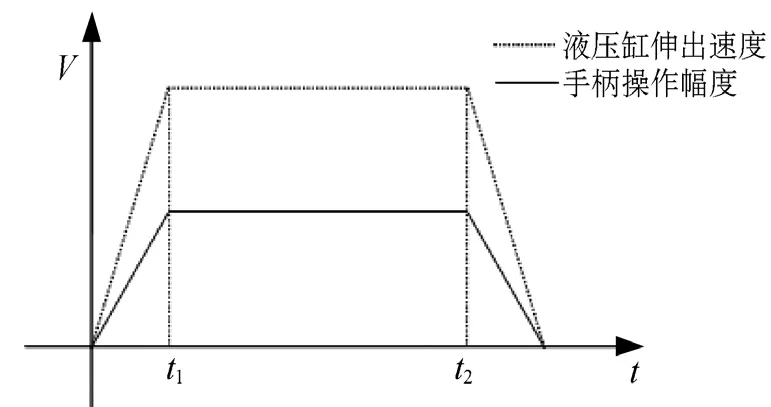
圖2 臂架伸速與手柄幅度
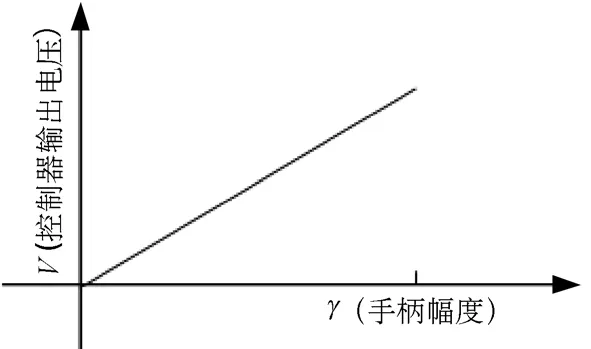
圖3 手柄幅度與控制器輸出
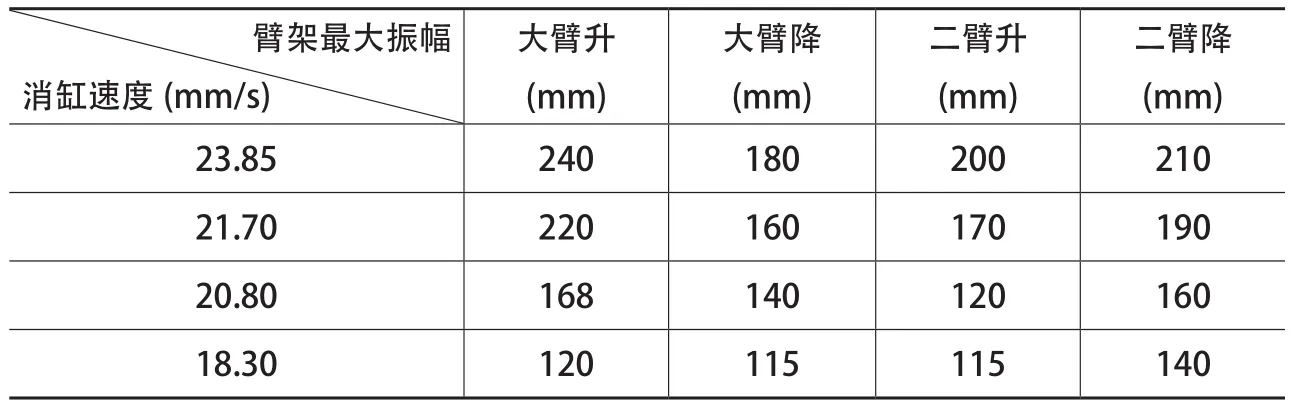
表1 臂架油缸平均速度與臂架晃動振幅

表2 手柄開度與端口輸出電流對應表
按照以上思路,如果在相同操作下可以降低多路閥響應速度,使控制多路閥的輸出比例電流按照一定緩沖曲線輸出,可有效降低突然啟停引起的沖擊,從而保證起動和停止階段臂架平穩運行。所以在t1、t2階段,加入緩沖曲線度,使得初始階段緩慢輸出,后段快速輸出。通過控制器采集手柄開度數值(取值范圍0~127)與端口輸出電流相應變化數據,部分數據如表2所示。
通過采集數據,擬合手柄開度值與比例閥電流(mA)緩沖曲線,如圖4所示。通過修訂及應用比較不同曲線輸出效果,確定3型擬合曲線。
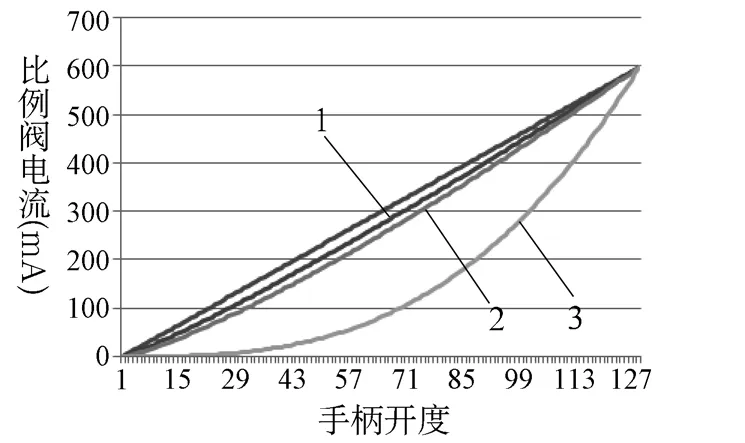
圖4 手柄開度與比例閥電流擬合曲線
由于t1、t2變換時間短,在應用緩沖曲線輸出后,臂架抑振效果有限,為進一步提升抑振效果,需要降低端口輸出響應。根據控制原理,設計一階慣性環節軟件算法。

其中,a為慣性系數,Y(n-1)為上次輸出值,X(n)為本次采樣值。此慣性濾波算法能使本次采樣值與上次輸出值進行加權,使得輸出對輸入有一定反饋作用,從而有效降低手柄突變對比例閥輸出響應。
4 結 語
本文通過對噴漿車臂架振動影響因素分析,明確了臂架抑振控制的控制方式,通過引用緩沖曲線及慣性算法,優化控制策略,在一定程度上有效彌補機械特性帶來的性能缺失。經過場內及施工現場實踐,噴漿車臂架晃動明顯降低,操作可控性、臂架工作壽命均得到了提升。
猜你喜歡
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:00
建材發展導向(2021年7期)2021-07-16 07:08:04
水利規劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
上海建材(2018年3期)2018-08-31 02:27:52
江西建材(2018年2期)2018-04-14 08:01:05
江西建材(2018年2期)2018-04-14 08:00:10
水利技術監督(2017年2期)2017-05-17 05:19:34
水利科技與經濟(2016年2期)2016-04-09 02:09:13
