基于地面激光雷達的田間花生冠層高度測量系統研制
2019-01-17 08:22:06蔡振江NingWang袁洪波
農業工程學報 2019年1期
程 曼,蔡振江,Ning Wang,袁洪波
?
基于地面激光雷達的田間花生冠層高度測量系統研制
程 曼1,2,蔡振江1※,Ning Wang2,袁洪波1
(1. 河北農業大學機電工程學院,保定 071001;2. 美國俄克拉荷馬州立大學生物系統與農業工程系,斯蒂爾沃特 74075,美國)
在花生育種研究中對于冠層高度的獲取主要依靠人工測量,不但費時費力,而且存在一定的主觀性。為解決這一問題,該文構建了一個田間花生冠層高度特性表型信息獲取系統,利用地面激光雷達LiDAR對花生冠層結構進行掃描,獲取其三維點云數據;采用多項式曲線擬合算法對點云數據進行分析,描繪冠層的大致輪廓并確定其邊界,以得到目標冠層的有效數據集;通過對有效點云數據集生成的冠層高度矩陣分析,得到冠層的高度特性。試驗結果表明,利用該系統獲取的花生冠層平均高度與手工測量值最小偏差為2%,最大偏差為32%,最大偏差受地形影響和植株早期冠層本身的低高度所致,平均測量偏差約為11%,位于15%的可接受范圍之內。該系統可以實現田間花生冠層高度信息的快速自動化獲取,減少了人力成本的投入,該研究可為花生育種研究提供參考。
作物;測量;圖像處理;花生;冠層高度;LiDAR;田間測量
0 引 言
在花生育種研究中,株高是一個非常重要的表型性狀,它不僅可以衡量花生的生長狀態,而且還是計算其生物量和產量的一個重要參數。當前,在育種研究中對于花生株高的獲取主要依靠人工測量,不但費時費力,而且存在一定的主觀性。快速有效地進行花生冠層高度信息的田間自動化檢測,是當前花生育種研究的一個熱點。
隨著各種作物表型信息研究的發展,越來越多的現代化技術手段被應用到作物表型的檢測中。使用可見光成像及圖像處理的方法對作物植株表型信息進行檢測應用較為廣泛,如王傳宇等[1]使用時間序列圖像方法對玉米葉片角度進行分析,研究其干旱脅迫下的形態變化;牛慶林等[2]利用無人機搭載的數碼相機對玉米育種材料的株高和LAI進行了監測。為了進行更為復雜的幾何特征檢測,3D成像技術也得到了廣泛的應用,如Lati等[3]利用動態規劃和立體視覺構建了一種三維植物建模方法,Sylvain等[4]利用SFM (structure from motion) 技術評估了植物的株高和葉面積,估算值和實測值存在很強的線性關系(2>0.94);胡鵬程等[5]將SFM技術和多視角立體視覺方法相結合,對黃瓜、茄子和青椒等植株進行了三維重建并對葉片進行了分析。利用視覺圖像方法對植物表型信息進行獲取和分析比較簡單,但是仍然存在一些問題,對于二維圖像,用于拍攝的相機在使用之前需要校準,而且圖像僅僅顯示顏色和冠層的形狀,不能直接獲取植株的高度;對于三維成像,檢測之前同樣需要對相機進行校準,還需要通過圖像分析來計算植株的高度和位置信息,而非直接測量得到,因此不能完全真實和精確地反映植株的真實信息。此外,所有的可見光成像方法不可避免地會受到光照條件的影響,如陰影和遮擋等容易造成測量誤差。
超聲波傳感器技術從40多年前就應用到了農業研究領域中[6],它主要被應用在果樹的結構和外觀檢測中,特別是果樹的冠層檢測。Hossein等[7]設計了包含多個超聲波傳感器的系統用于檢測果樹的樹冠輪廓,用于噴霧控制;Zaman等[8]用超聲波檢測果樹冠層大小和體積,并嘗試用來估計柑橘的產量。一些研究證明超聲波傳感器可以構建低成本的植物冠層表型系統,但是其測量精度受到距離和外界干擾的嚴重影響,而且目標反射率對其精度也有非常重要的影響[9],因此多用于果樹等具有較大葉片和冠層的植物的檢測中,較少用于田間作物表型信息的獲取。由于熱輻射的存在,一些研究者也嘗試利用紅外傳感器對植物冠層進行探測,這些研究主要是捕捉冠層的溫度數據,而不僅僅是檢測冠層的形狀和輪廓[10-13]。紅外傳感器的使用一般通過無人機或遙感平臺進行大規模的森林、稻田、小麥、玉米等作物大尺度冠層信息的檢測[14-17],也常用于植物三維測量和冠層結構分析的檢測中。
超聲波傳感器精度較低,紅外傳感器易受外界溫度影響,在最近的一些研究中,激光雷達LiDAR已經越來越多的應用在作物冠層的檢測中,它可以發射激光脈沖并通過計算從發射到返回的時間間隔來確定物體到自身的距離,從而獲得高密度的3D點云數據,具有分辨率高,抗干擾性強等優點,可以直接獲取作物冠層的結構參 數[14]。LiDAR已經廣泛應用到了林木和果樹的樹高、冠層直徑、樹形結構和輪廓測量[18-20],LiDAR還經常與其他傳感器如視覺傳感器、熱成像傳感器等一起使用,以獲取更豐富的作物冠層表型信息[21-23]。LiDAR獲取的三維點云數據能夠較好地描述作物冠層的輪廓和高度,且幾乎不受太陽輻射、空氣溫濕度、背景溫度及光照變化等環境因子的影響,所以在作物冠層表型信息檢測方面應用潛力很大。
本文搭建了一個基于LiDAR的田間花生冠層高度信息獲取系統,并對3種不同品種的花生在不同生長階段進行了多次的冠層高度信息采集試驗。采用多項式曲線擬合算法對激光掃描得到的點云數據進行分析,確定冠層的輪廓及邊界,對有效冠層數據進行分析,并與人工采集的高度信息進行了對比,以驗證該系統用于花生冠層高度信息獲取的可行性。
1 試驗系統設計與數據獲取
1.1 田間花生冠層高度獲取系統設計
為了獲取作物冠層表型信息,當前的研究人員設計了基于拖拉機平臺、無人機平臺等多種信息獲取系統[24-30]。花生冠層之間的間隙較小,拖拉機輪胎寬度遠大于壟間空隙,在行進過程中容易碾壓到花生植株,所以拖拉機平臺不適用;無人機雖然不會直接接觸花生植株,但是飛行過高測量精度降低,飛行過低產生的風壓會造成冠層的晃動,而且不便于為搭載的LiDAR供電并且傳輸數據到筆記本電腦,所以無人機平臺也不適用。根據實際的田間試驗條件,設計了一種不會對花生冠層自然狀態造成干擾的田間數據獲取系統,如圖1所示。
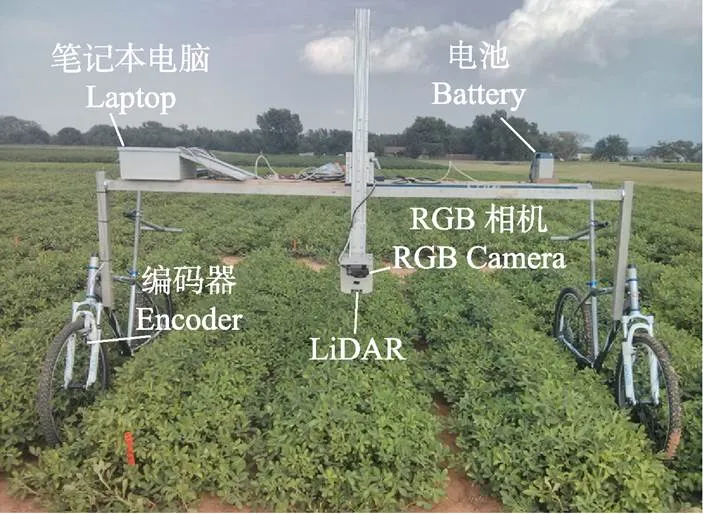
圖1 田間花生冠層高度獲取系統結構示意圖
該系統是一個移動式數據采集平臺,系統平臺由2個自行車車體通過連接框架固定,保證其實現同步行進。系統長2.8 m,高1.5 m,所搭載的傳感器包括一個地面激光雷達LiDAR(LMS291-05S,SICK,德國)用于掃描花生冠層,一個RGB相機(GoPro 4,GoPro Inc,美國)用于拍攝花生冠層圖像,一個編碼器(Danapar,Gurnee,美國)用于記錄系統平臺的移動距離;所有傳感器由一個24 V電池供電,并將所有數據傳輸到一個筆記本電腦上,其中LiDAR和RGB相機的安裝方向為垂直朝向地面,二者處于同一水平位置,且RGB相機位于LiDAR的正前方。
1.2 試驗環境及傳感器參數設定
田間試驗于2015年5月—10月在美國俄克拉荷馬州立大學Caddo試驗站(35.099581°N,98.438498°W)花生育種試驗田進行。該試驗田共有12個種植小區,小區呈直線排列,每個小區長4.57 m,相鄰小區之間間隔為1.52 m,小區內壟寬為0.91 m,如圖2所示。12個種植小區共種植了3個不同品種的花生:SWR、MCD、GA04S,每個小區一個品種,每個品種重復4次,種植同一品種的地塊互不相鄰。試驗時選取一列作為測量目標,分別于2015年7月10日、8月21日、9月18日行了3次試驗,每次試驗均全部測量12個小區,每次試驗重復測量3次。
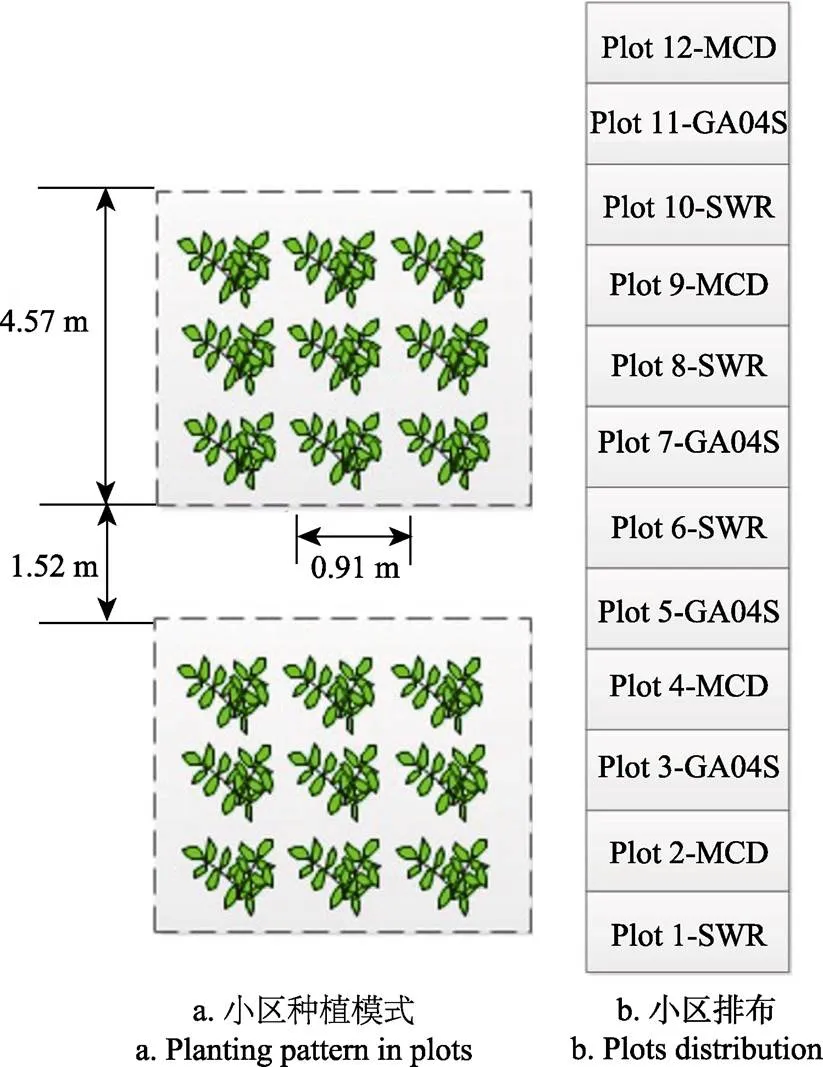
注: SWR、MCD、GA04S分別為3種不同的花生品種。
試驗使用德國SICK公司二維單線激光雷達LMS291- S05,掃描角度為180°,角分辨率有0.25°、0.5°和1.0°共3種可選模式。LiDAR的響應時間與角分辨率相關,分辨率越高,響應時間越長,對應3種角分辨率的反應時間分別是53、26和13 ms。為了獲得更加準確的冠層表型數據,試驗過程中選擇角分辨率為0.25°,根據LiDAR的響應時間,在測速器的指導下系統平臺的移動速度控制在不超過0.189 m/s。此外,不同品種的花生冠層形狀和覆蓋范圍各不相同,掃描時要保證既能掃描到所有品種的完整冠層結構,還要求系統平臺運動時不接觸到花生植株,保證掃描數據是不受外界因素影響的、完整的和有效的。LiDAR的俯仰偏置角和水平偏置角均為0°,保證LiDAR所有掃描點所構成的掃描工作面垂直于地面;LiDAR的水平方向掃描范圍為100°,為了完整地掃描到目標冠層的全部數據,需要保證LiDAR能夠掃描到目標列左右的花生冠層,即掃描寬度需要大于1.82 m,由此確定LiDAR高度為1 m,則掃描寬度為2.38 m,滿足要求。在該種工作模式下,由0.25°的角分辨率可得LiDAR掃描線每一次掃描得到401個點的高度信息。利用SICK公司配套軟件Sick LMS 2XX Series可以將掃描數據轉換為每個激光脈沖反射點到LiDAR所在平面的距離并輸出轉換結果。每個掃描點之間的水平間隔為5.95 mm,并隨著系統平臺的移動完整的掃描整個地塊的花生冠層。
1.3 冠層高度手工測量方法
為了和冠層高度信息獲取系統得到的數據進行對比,在田間試驗的同時對冠層高度進行了手工測量。測量方法為:在系統前進的方向上,距離每個小區起始點0、0.91、1.83、2.74、3.66和4.57 m處各測量一次,每次測量時以15.24 cm為間隔對被測冠層從左到右的7個不同位置進行采樣。每次試驗時每個小區共測量42個采樣點,整個試驗田共測量504個采樣點的高度數據。
2 花生冠層高度信息分析算法
2.1 花生冠層有效數據集提取
通過LiDAR得到的高度數據表示的是冠層到LiDAR的距離,而不是其實際高度,高度數據可以在這些數據的基礎上,通過式(1)計算得到。

式中表示掃描點個數,Heightplanti表示花生冠層上每個掃描點的實際高度,Heightlaserscanner表示LiDAR距地面水平基準線高度,試驗前已經標定完成,y表示LiDAR系統獲取的每個掃描點到LiDAR所在平面的距離。圖3所示為冠層高度、LiDAR掃描距離和地面水平基準線之間的相對位置。
注:1,2,3,4,…,表示冠層每個掃描點到LiDAR所在平面的距離。
Note:1,2,3,4, …,represented the distance between each scanning point of the canopy and the plane of LiDAR.
圖3 LiDAR掃描距離、冠層高度及地面水平基準線相對位置
Fig.3 Relative position of LiDAR scanning distance, canopy height and ground horizontal reference
如果Heightplanti的值為0,意味著激光脈沖恰巧照射到了地面水平基準線所在的地面,但是因為田間地面并非絕對平面,存在一定的坑洼起伏,則Heightplanti的值會出現負值和小于某一特定范圍的正值(根據采集到的數據經統計得出一般小于30 mm),因此所有小于30 mm的Heightplanti值在后續計算時將被調整為0。
不同品種的花生冠層形狀存在一定的差異,雖然相鄰2列的花生植株之間存在一定的空間間隔,但是由于冠層的延展性,這些間隙可能會被覆蓋。為了能夠確保激光完整的掃描到目標列的完整冠層結構,掃描角度需要設置的較大,因此,相鄰列的一部分冠層將不可避免被激光掃描到,系統所得到的掃描數據里會存在這些干擾信息,如圖4所示。
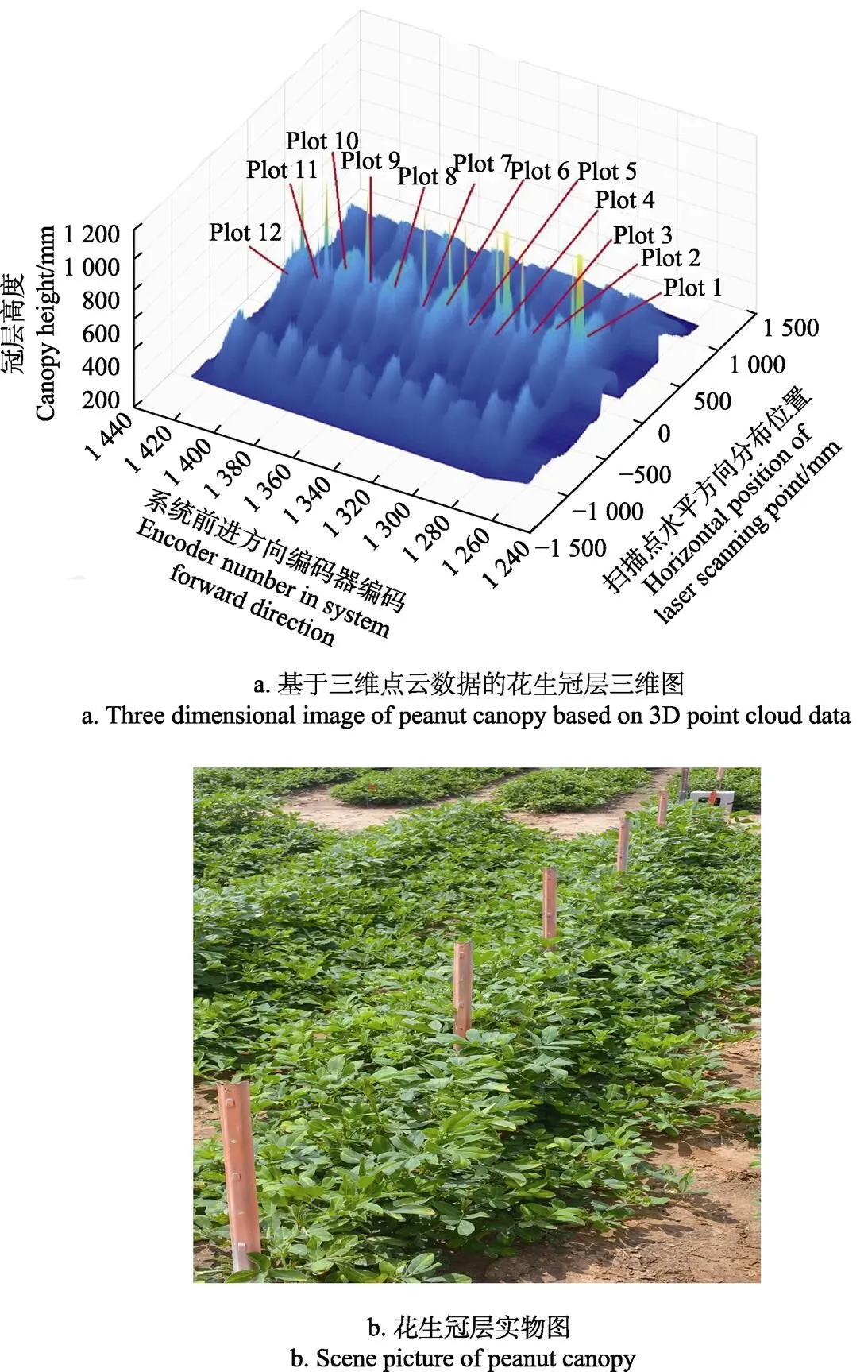
注:三維圖像的數據為2015年8月采集的數據,圖中顯示了全部12個小區。三維仿真圖和實物圖中棒狀物用來標定系統平臺移動的參照位置。
為了得到準確的試驗數據,必須消除無關的干擾信息(相鄰列及標定物),為此本文設計了一種利用多項式曲線擬合提取目標區域(region of interest, ROI)的算法,該算法的實施包含以下5個步驟,算法流程圖如圖5所示。
1)按地塊分割原始數據
為了記錄系統平臺的移動距離,在車輪附近安裝有編碼器,當系統平臺按照指定方向運動時,車輪帶動編碼器運動,車輪每轉動1周,編碼器記錄1000個數據。由于編碼器的編碼僅與運動距離有關,且每個地塊的大小相等,可以利用編碼器編碼作為依據,對原始數據按照地塊編號進行分割,如式(2)所示。全部的激光掃描數據被分成12個獨立的單元,每個單元包含一個特定小區的花生冠層特征數據。

式中Numbereachplot表示每個地塊的編碼器編碼個數;Codingencoder-start表示系統開始運行時的編碼器編碼,即系統開始運動時的起始編碼,Codingencoder-end表示系統工作結束時的編碼器編碼,即系統完成全部地塊掃描的結束編碼;Numberplots表示掃描地塊總數。
2)擬合每一個冠層掃描平面的點云數據
從側面看,花生冠層的形狀在自然生長狀態下總是表現出弧形或近似弧形,如果能夠用某種曲線去擬合這種形狀,則這條擬合曲線就能夠代表在該剖面上(冠層掃描平面)的冠層特征,整個冠層的輪廓特征也就能夠通過每個冠層剖面(掃描平面)的特征擬合曲線的疊加來描述,如圖6所示。
多項式曲線擬合可以用來構造冠層掃描平面點云數據的擬合曲線,擬合曲線附近的點云數據反映了在該掃描平面的冠層各掃描點的高度信息。進行曲線擬合的目的只是為了找到冠層粗略的輪廓,所以擬合曲線能夠大致反映點云數據變化趨勢即可,而不需要進行精確的模擬。經過試驗,發現低階擬合曲線(3階以下)不能正確顯示花生冠層輪廓特征變化趨勢,而高階擬合曲線(6階及以上)又會導致過擬合現象的發生,5階曲線擬合較為合適,擬合公式如式(3)所示。
式中表示第i階變量的系數,xi表示第i階變量,n表示多項式的階數(本文取n=5)。
3)計算擬合曲線極值
每個冠層剖面擬合曲線的極大值點和極小值點分別代表了該剖面的最高點和最低點,即該冠層剖面的最高點和最低點的大致位置,利用這些位置可以大致確定冠層的輪廓邊界。輪廓邊界確定后,可以根據邊界位置從原始數據中提取目標的有效數據。由于受到客觀環境如地形地貌、移動速度甚至天氣因素的影響,掃描過程中不可避免地存在冠層表型特征數據獲取錯漏或丟失的情況;此外,花生冠層不規則生長和其他相鄰列冠層延展的干擾,會導致激光掃描點云數據所生成的擬合曲線的極值點數不固定,雖然理想狀態下極小值為2個,但是也有少量的擬合曲線的極小值為1個、3個或不存在的情況出現,如圖7所示。為了完整地掃描到目標列的冠層,通過設定LiDAR掃描范圍和高度值,系統工作時會掃描到目標列左右兩側的一部分冠層,但是不會掃描到左右兩側冠層的最高點,因此2個極小值點就能夠反映目標列冠層輪廓與左右兩列冠層的分界位置。
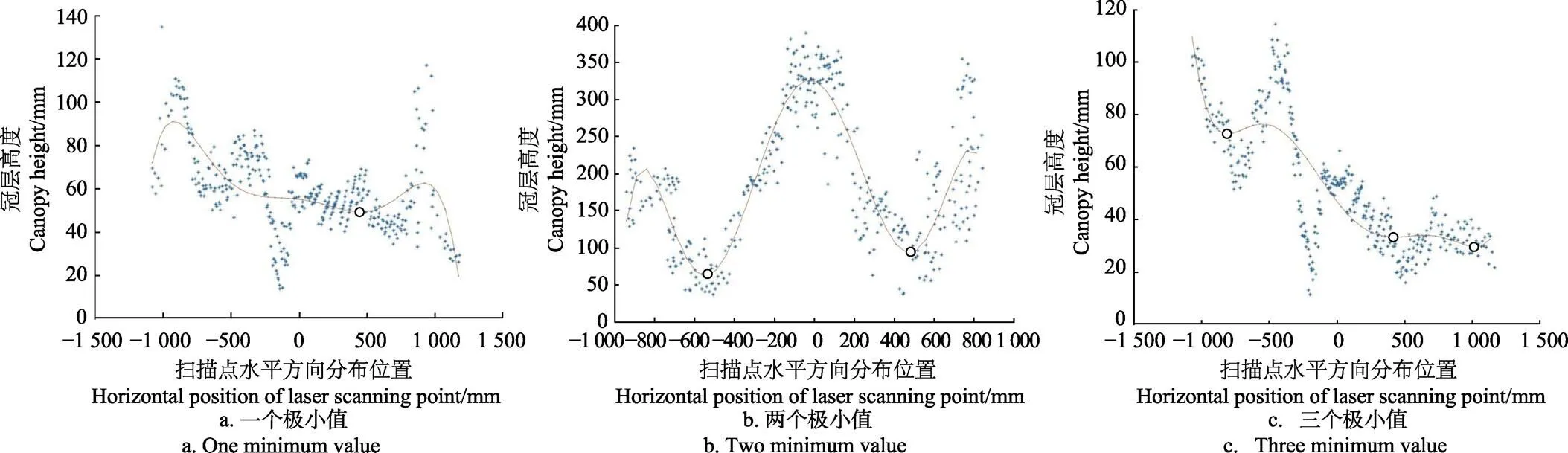
圖7 花生冠層掃描平面點云數據擬合曲線極小值分布情況
4)根據極值點判斷冠層邊界
冠層邊界可以從擬合曲線中得到的極小值來確定,雖然極小值數量并不總是2個,但經過統計分析,2個極小值的出現情況在83%以上,所以可以根據2個極小值位置來確定冠層的輪廓邊界,忽略極小值為其他值的情況。在步驟3)中已經計算了每一條冠層掃描剖面擬合曲線的極值點,然后找出所有存在2個極小值點情況的擬合曲線,分別計算這些擬合曲線的極小值點在水平掃描線上的映射位置;將每條擬合曲線的兩個極小值點的映射位置按大小進行左右排列,并分別計算左右兩側所有映射位置的平均值。求得的所有映射位置和映射平均值是在擬合曲線基礎上得到的計算值,并不代表真正的掃描點位置,求出掃描點分布軸上最接近這兩個平均值的掃描點位置后(positions of the scanning points, PSP),可以根據得到的PSP來確定冠層的輪廓邊界,PSP中間的部分被視為目標數據,而PSP外部兩側的部分被視為相鄰列的冠層數據,如式(4)所示。
式中表示兩個極小值情況的出現次數,average-left表示左側極小值映射位置的平均值,xminimum-left表示具有兩個極小值的每條擬合曲線左側極小值在掃描點分布軸投影位置值,average-right和xminimum-right分別表示右側極小值映射位置平均值和具有兩個極小值的每條擬合曲線右側極小值在掃描點分布軸投影位置值。

式中row表示每個小區的掃描行數,即掃描平面數,canopyboundary-left和canopyboundary-right分別表示冠層輪廓左、右邊界掃描點位置(PSP),xscanningpoint-all表示第個掃描行每個掃描點在掃描點分布軸的位置。
5)根據冠層輪廓邊界點提取有效數據
根據上述步驟確定的PSP,將兩個PSP之間的數據視為有效數據,將其他數據視為干擾數據,進行有效數據的提取。
2.2 數據過濾及修正方法
為了保證系統平臺沿著指定的方向運動,在被測地塊中豎立了一些標定桿,以確保其在運動期間不發生偏轉,平臺在移動時LiDAR始終與標定桿位置對齊。標定桿的存在雖然保證了系統平臺運動方向的準確性,但是不可避免地會被激光掃描到,會對冠層數據信息的準確性造成一定的干擾,尤其是會影響到冠層高度平均值和最大值的計算,所以標定桿的干擾需要過濾掉。此外,由于系統平臺在運動過程中的振動和外界客觀環境的干擾,在原始數據中也存在一些噪聲,這些干擾也應該被濾除。利用式(6)、(7)和(8)可以去除這些干擾噪聲。



式中Heightjudgement表示第行冠層高度掃描數據的噪聲濾除判定算子,Heightmean和Heightstd代表第行冠層高度掃描數據的平均值和標準差,Height(i,j)interpolation表示第行冠層高度掃描數據中與第個掃描點相鄰的左右2個點的高度平均值,Height(i,j)row表示第行冠層高度掃描數據中第個掃描點的原始高度數據值,Height(i,j)fixed表示第行冠層高度掃描數據中第個掃描點修正后的數據值,row表示掃描行數。數據修正后12個被測小區的花生冠層3D圖像如圖8所示,從圖中可以明顯看出圖4a中所示標定桿已經被濾除。
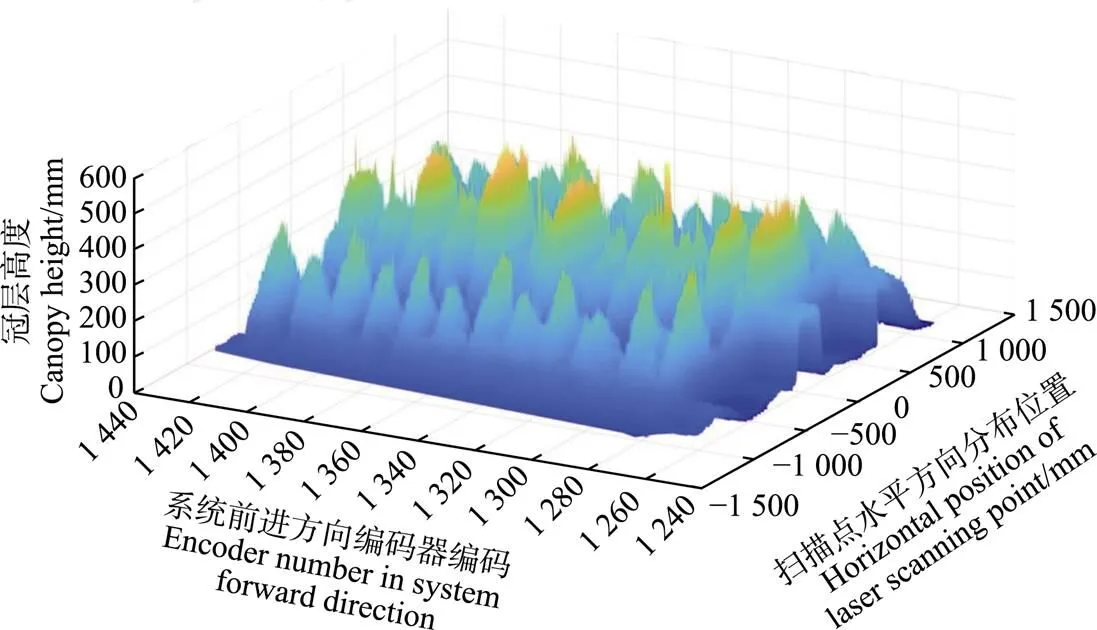
圖8 數據過濾及修正后花生冠層3D圖像
3 結果與討論
3.1 花生冠層高度信息獲取結果
試驗測量的育種小區總數為12個,種植了3個不同品種的花生,為了全面獲取每一個品種的花生冠層的高度,需要計算每個品種的最大高度(max)、最小高度(min)、平均高度(avg)、高度中位數(med)等不同的高度特性。為了方便對這些表型信息進行計算和統計,所有掃描到的冠層高度數據經過上述方法處理之后的有效數據以高度矩陣的形式被保存,即每個小區目標列有效冠層高度值構建成一個冠層高度矩陣(canopy height matrix,CHM),CHM中每一行代表一條掃描行的數據,也就是一個掃描平面(冠層剖面)上的高度值;然后在CHM的基礎上計算每一行的最大值,即每一條掃描行有效數據里的最大冠層高度值,并生成最大高度列矩陣(mximum height column matrix,MHCM)。花生冠層各種高度特性表型信息的計算如式(9)所示。
式中Heightmax表示CHM中第行的最大值,row表示CHM行數,即掃描行數。
花生冠層平均高度分析結果與手工測量值對比如表1所示,由表1可以看出,同一個生長階段的3個花生品種中,SWR的株高最高,GA04S株高最低。從不同生長階段看,從7月份開始生長1個月后,各個品種的花生植株的高度都有了明顯的增加,該階段花生處于營養生長旺盛時期;從8月份之后植株生長變緩,株高基本保持穩定,該階段花生處于生殖生長的時期。由分析結果看,花生冠層高度的變化與其不同生長階段的生長特性變化一致。
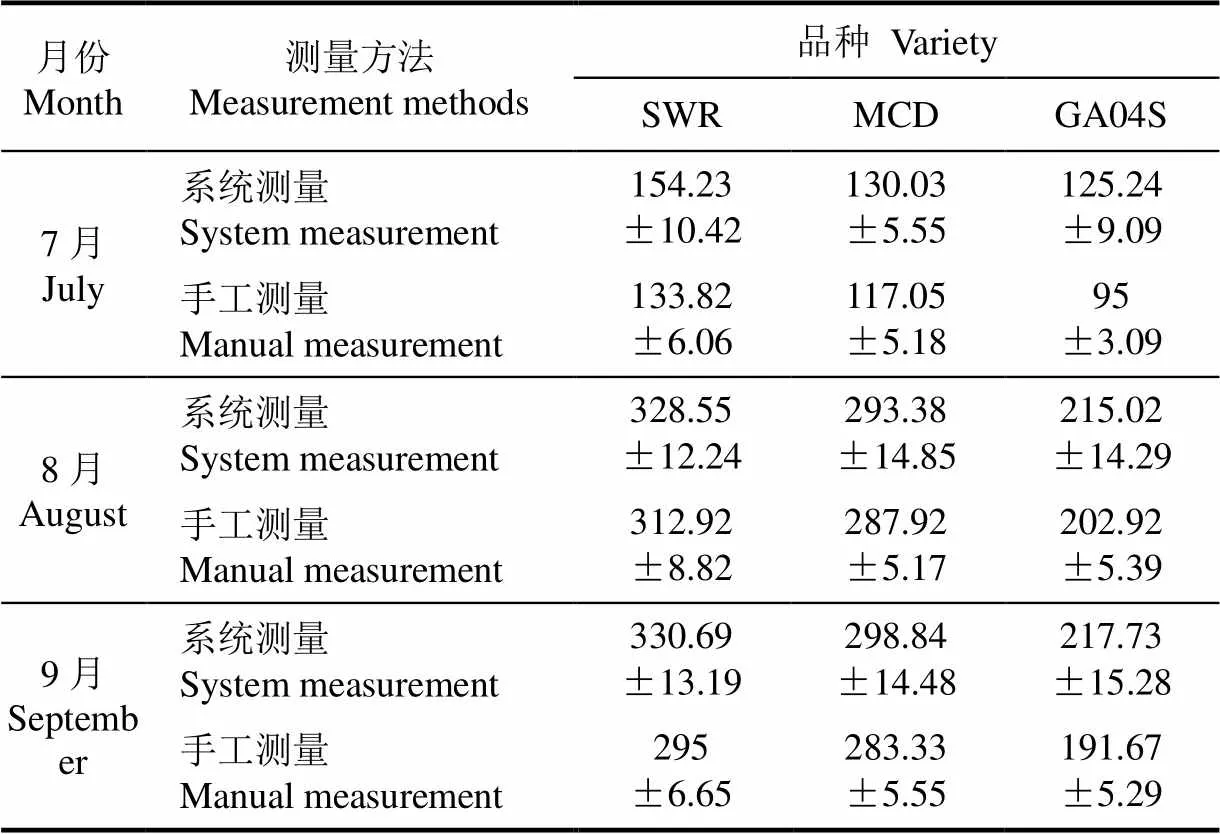
表1 不同品種花生冠層不同生長時期平均高度系統測量值與手工測量值對比
注:文中數據以均值±標準偏差表示。
Note: Data were expressed by means ± standard deviation.
3.2 系統測量值與手工測量值比較分析
為了評估系統平臺獲取花生冠層高度數據的精度,將每個月份每個品種系統測量的高度均值與手工測量的均值進行了比較分析。
可以看出,根據掃描數據計算得到的值比手工測值略高,偏差大概在2%32%之間,平均偏差約為11%,滿足美國農業部小麥、花生及其他田間作物(USDA-ARS,Wheat,Peanut and Other Field Crops)研究中心提出的偏差小于15%的要求(In-Field Peanut Canopy Phenotyping with Sensors,USDA-WPOFCR)。造成這一結果的主要原因在于田間試驗條件下,地面不是一個絕對平面,而是存在高低起伏,所以激光掃描測量到的冠層高度信息疊加了地面高度,而信息采集系統的校準和標定是在理想情況下,即地表是平面情況下得到的;而手工實測花生冠層高度時,得到的數據是相對高度,即冠層相對于植株所在地點的地面高度。但是隨著花生植株的生長,地形對于掃描結果的影響相對減少了,以GA04S的冠層平均高度值為例,7月份系統掃描得到的值為125.24 mm,手工測量值為95 mm,二者之間偏差值為30.24 mm,而8月份系統掃描得到的值為215.02 mm,手工測量值為202.92 mm,二者之間的偏差縮小到了12.1 mm,這表明在花生植株逐漸成型之后使用激光掃描的方法獲取其冠層表型信息是可行的。
在測量效率上,LiDAR系統也要遠高于手工測量。試驗地塊共12個育種小區,每個小區長度為4.75 m,測量目標列總長度為54.84 m,系統完整的將所有花生植株掃描一遍花費時間約為5~8 min,每個育種小區目標列的有效點云數量大于12萬個點;手工測量使用采樣法,每個小區采樣42個點,每個采樣點測量高度花費時間約為10 s,試驗時共采樣504個點,花費時間約為84 min,系統測量的工作效率遠大于手工測量。
3.3 討 論
利用LiDAR進行作物冠層表型信息的獲取存在較大的應用潛力,它具備不受外界光照條件影響,可以直接獲取作物冠層高度信息而不需要計算,信息準確性較高等優點。但是在實踐應用中還存在一些需要注意的問題:
首先,現場地形的變化會對所獲取的信息產生一定的影響。例如,花生冠層高度的系統測量值和手工測量最大偏差為32%,這一偏差出現在7月份對于GA04S品種的測量。該品種在每一個生長階段都是所有試驗品種中植株最矮的,植株越矮,受到地形的影響越明顯。在7月份GA04S的冠層高度手工測量值僅為95 mm,系統測量值為125.24 mm,二者之間的差值為30.24 mm,而在實際田間環境下,30 mm的地形起伏是很常見的。但是在8月份和9月份,花生生殖生長結束之后,所有品種的花生冠層高度在215~300 mm之間,此時,系統測量值和手工測量值之間的偏差都在10%以下,此時因為花生植株高度相對較大,偏差比例變小,所以同樣的地形變化所導致的花生冠層高度測量偏差相對較小。由此表明,隨著植株高度的逐漸增加,地形所帶來的影響在逐漸變小。
其次,信息采集系統的穩定性也會影響數據的準確性,因此LiDAR在運動中應保持平穩,減少振動。此外,LiDAR不能獲取植物的顏色信息,而有時不同作物品種之間的葉片顏色也是育種工作者所關心的,因此若想獲取更多的冠層表型信息,還需要與其他傳感器配合使用。
4 結 論
本文設計了一種基于LiDAR的田間花生冠層高度信息獲取系統,并進行了田間試驗。結果表明,利用該系統獲取的花生冠層高度與手工測量值之間的平均偏差約為11%,相對于花生植株的高度,這一結果的精度是可以接受的,而且利用該系統進行冠層高度信息的采集能夠大大減少工作時間,降低人工勞動力的投入,提高作物表型數據獲取及分析的效率。
[1] 王傳宇,郭新宇,杜建軍,等. 基于時間序列圖像的玉米植株干旱脅迫表型檢測方法[J]. 農業工程學報,2016,32(21):189-195. Wang Chuanyu, Guo Xinyu, Du Jianjun, et al. Maize plant drought stress phenotype testing method based on time-series images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(21): 189-195. (in Chinese with English abstract)
[2] 牛慶林,馮海寬,楊貴軍,等. 基于無人機數碼影像的玉米育種材料株高和LAI監測[J]. 農業工程學報,2018,34(5):73-82. Niu Qinglin, Feng Haikuan, Yang Guijun, et al. Monitoring plant height and leaf area index of maize breeding material based on UAV digital images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(5): 73-82. (in Chinese with English abstract)
[3] Lati Ran Nisim, Filin Sagi, Eizenberg Hanan. Estimating plant growth parameters using an energy minimization-based stereovision model[J]. Computers and Electronics in Agriculture, 2013, 98(7): 260-271.
[4] Sylvain Jay, Gilles Rabatel, Xavier Hadoux, et al. In-field crop row phenotyping from 3D modeling performed using structure from motion[J]. Computers and Electronics in Agriculture, 2015, 110: 70-77.
[5] 胡鵬程,郭焱,李保國,等. 基于多視角立體視覺的植株三維重建與精度評估[J]. 農業工程學報,2015,31(11):209-214.Hu Pengcheng, Guo Yan, Li Baoguo, et al. Three-dimensional reconstruction and its precision evaluation of plant architecture based on multiple view stereo method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(11): 209-214. (in Chinese with English abstract)
[6] Alexandre Escola, Santiago Planas, Joan Ramon Rosell, et al. Performance of an ultrasonic ranging sensor in apple tree canopies[J]. Sensors, 2011, 11(3): 2459-2477.
[7] Hossein Maghsoudi, SaeidMinaei, Barat Ghobadian,et al. Ultrasonic sensing of pistachio canopy for low-volume precision spraying[J]. Computers and Electronics in Agriculture, 2015, 112: 149-160.
[8] Zaman Q U, Schumann A W, Hostler H K. Estimation of citrus fruit yield using ultrasonically-sensed tree size[J]. Applied Engineering in Agriculture, 2006, 22(1): 39-44.
[9] Kimes D S, Idso S B, Pinter P J J, et al. View angle effects in the radiometric measurement of plant canopy temperatures[J]. Remote Sensing of Environment, 1980, 10(4): 273-284.
[10] Luvall J C, Lieberman D, Lieberman M, et al. Estimation of tropical forest canopy temperatures, thermal response numbers, and evapotranspiration using an aircraft-based thermal sensor[J]. Photogrammetric Engineering & Remote Sensing, 1990, 56(10): 1393-1401.
[11] Jones H G, Serraj R, Loveys B R, et al. Thermal infrared imaging of crop canopies for the remote diagnosis and quantification of plant responses to water stress in the field[J]. Functional Plant Biology, 2009, 36(10/11): 978-989.
[12] Wang Mingfei, Dong Daming, Zheng Wengang, et al. Using infrared sensor for large area canopy total temperature measurements of rice plants[J]. Applied Engineering in Agriculture, 2013, 29(1): 115-122.
[13] Mahendra Bhandari. Use of Infrared Thermal Imaging for Estimating Canopy Temperature in Wheat and Maize[D]. Canyon:West Texas A &M University, 2016.
[14] 劉建剛,趙春江,楊貴軍,等.無人機遙感解析田間作物表型信息研究進展[J]. 農業工程學報,2016,32(24):98-106. Liu Jiangang, Zhao Chunjiang, Yang Guijun, et al. Review of field-based phenotyping by unmanned aerial vehicle remote sensing platform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(24): 98-106. (in Chinese with English abstract)
[15] Dimitry Van der Zande, Wouter Hoet, Inge Jonckheere, et al. Influence of measurement set-up of ground-based LiDAR for derivation of tree structure[J]. Agricultural and Forest Meteorology, 2006, 141(2/3/4): 147-160.
[16] Cote Jean-Francois, Fournier Richard A, Frazer Gordon W, et al. A fine-scale architectural model of trees to enhance LiDAR-derived measurements of forest canopy structure[J]. Agricultural and Forest Meteorology, 2012, 166-167(1): 72-85.
[17] McMahon Sean M, Bebber Daniel P, Butt Nathalie,et al. Ground based LiDAR demonstrates the legacy of management history to canopy structure and composition across a fragmented temperate woodland[J]. Forest Ecology and Management, 2015, 335: 255-260.
[18] Saeys W, Lenaerts B, Craessaerts G, et al. Estimation of the crop density of small grains using LiDAR sensors[J]. Biosystems Engineering, 2009, 102(1): 22-30.
[19] Li Xudong, Zhao Huijie, Liu Yang, et al. Laser scanning based three dimensional measurement of vegetation canopy structure[J].Optics and Lasers in Engineering, 2014, 54(1): 152-158.
[20] Liu Shouyang, Baret Fred, Abichou Mariem, et al. Estimating wheat green area index from ground-based LiDAR measurement using a 3D canopy structure model[J]. Agricultural and Forest Meteorology, 2017, 247: 12-20.
[21] Underwood James P, Hung Calvin, Whelan Brett, et al. Mapping almond orchard canopy volume, flowers, fruit and yield using lidar and vision sensors[J]. Computers and Electronics in Agriculture, 2016, 130: 83-96.
[22] Narvaez F J Y, Pedregal J S D, Prieto P A, et al. LiDAR and thermal images fusion for ground-based 3D characterization of fruit trees[J]. Biosystems Engineering, 2016, 151: 479-494.
[23] Weiss Ulrich, Biber Peter. Plant detection and mapping for agricultural robots using a 3D LIDAR sensor[J]. Robotics and Autonomous Systems, 2011, 59(5): 265-273.
[24] Shafiekhani A, Kadam S, Fritschi F B, et al. Vinobot and vinoculer: two robotic platforms for high-throughput field phenotyping[J]. Sensors, 2017, 17(1): 214.
[25] Deery D, Jimenez-Berni J, Jones H, et al. Proximal remote
sensing buggies and potential applications for fieldbased phenotyping[J]. Agronomy, 2014, 4(3): 349-379.
[26] Virlet N, Sabermanesh K, Sadeghi-Tehran P, et al. Field scanalyzer: An automated robotic field phenotyping platform for detailed crop monitoring[J]. Functional Plant Biology, 2016, 44(1): 143-153.
[27] Liebisch F, Kirchgessner N, Schneider D, et al. Remote, aerial phenotyping of maize traits with a mobile multisensor approach[J]. Plant Methods, 2015, 11(1): 9.
[28] Friedli M, Kirchgessner N, Grieder C, et al. Terrestrial 3D laser scanning to track the increase in canopy height of both monocot and dicot crop species under field conditions[J]. Plant Methods, 2016, 12(1): 9.
[29] Holman F H, Riche A B, Michalski A, et al. High throughput field phenotyping of wheat plant height and growth rate in field plot trials using UAV based remote sensing[J]. Remote Sensing, 2016, 8(12): 1031.
[30] Nadia Shakoor, Scott Lee, Todd C Mockler. High throughput phenotyping to accelerate crop breeding and monitoring of diseases in the field[J]. Current Opinion in Plant Biology, 2017, 38(8): 184-192.
System design for peanut canopy height information acquisition based on LiDAR
Cheng Man1,2, Cai Zhenjiang1※, Ning Wang2, Yuan Hongbo1
(1.071001,; 2.74075,)
Plant height is a very important phenotypic trait in peanut breeding research. It is a key parameter not only indicating the growth state of peanut, but also calculating peanut biomass and yield. At present, the acquisition of peanut plant height in breeding research mainly relies on manual measurement, which is not only time-consuming and laborious, but also has certain subjectivity. Therefore, it is necessary to design a measurement system that can be used in the field and can quickly and accurately obtain the height of peanut canopy. In this study, a LiDAR-based field peanut canopy height information acquisition system was constructed, which was a mobile data acquisition platform designed for field conditions, and a data processing and analysis algorithm was developed to extract the height of peanut canopy. The sensor was equipped with a LiDAR (LMS291-05S, SICK) for scanning the peanut canopy, an RGB camera is used to capture the image of the peanut canopy, an encoder was used to record the moving distance of the system platform; all sensors were powered by a 24 V battery and all data were uploaded to a laptop. An experimental field was established with three peanut cultivars at Oklahoma State University’s Caddo Research Station in Fort Cobb, Oklahoma state, USA in May and the data collections were conducted monthly from July to September 2015. There were 12 planting plots in the field, which were arranged in a straight line, and the length of each plot was 4.75 m, the interval between adjacent plots was 1.52 m, and the interval between ridges was 0.91 m in a plot. SWR, MCD and GA04S three different breeds of peanuts were planted in 12 different plots, each of which was repeated four times, and the plots of the same breed were not adjacent to each other. The ground-based LiDAR used for this research was a line-scan laser scanner with a scan-angle of 100°, an angle resolution of 0.25°, and a scanning speed of 53 ms. A wide aperture angle of 100°was used for LiDAR in order to ensure a complete scan of target canopy. As a result, the collected data included those from the adjacent rows. An algorithm was developed to extract the region of the interested data acquired by the system through the polynomial curve fitting method. To provide fixed reference points within each plot over the three collection periods, some metal posts were installed within the center length of each scanned row. These metal stakes were caught by the LiDAR in all the data file, in addition, noise also presented in the raw data. Therefore, a data filtering and correction algorithm was developed to eliminate the interference information. All valid canopy height data, which were processed according to the previously described preprocessing algorithms, were organized into a height matrix, that was, all the canopy height values scanned in each plot were constructed into a canopy height matrix, and then the mean heights were analyzed and calculated. The results showed that the minimum deviation of the average canopy height between obtained by the system and the manual measurement was 2%, the maximum deviation effected by topography was 32%, and the average deviation was about 11%, but the measurement deviation was gradually decreasing with the growth of peanut plants. The accuracy of this result was acceptable compared with the height of the peanut plant, and the collection of canopy height information by the system can greatly reduce working time and the input of artificial labor, and improve the efficiency of crop phenotypic information acquisition and analysis. Future research will focus on the rapid movement and manipulation of measurement system, and apply information fusion to data processing of multiple sensors.
crops; measurements; image processing; peanut; canopy height; LiDAR; field test
2018-08-05
2018-10-01
河北省農業關鍵共性技術攻關專項(17227206D);河北省高等學校科學研究計劃青年基金項目(QN2018081)
程 曼,河北石家莊人,副教授,博士,主要從事精細農業和農業信息化技術方面的研究。Email:chengman1982@163.com
蔡振江,河北保定人,教授,博士,主要從事自動化檢測及智能控制方面的研究。Email:czj65@163.com
10.11975/j.issn.1002-6819.2019.01.022
S24
A
1002-6819(2019)-01-0180-08
程 曼,蔡振江,Ning Wang,袁洪波. 基于地面激光雷達的田間花生冠層高度測量系統研制[J]. 農業工程學報,2019,35(1):180-187. doi:10.11975/j.issn.1002-6819.2019.01.022 http://www.tcsae.org
Cheng Man, Cai Zhenjiang, Ning Wang, Yuan Hongbo. System design for peanut canopy height information acquisition based on LiDAR[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 180-187. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.01.022 http://www.tcsae.org
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46