馬鈴薯薄片干燥過(guò)程形態(tài)變化三維成像
2019-01-17 08:53:02蔡健榮白竣文肖紅偉
農(nóng)業(yè)工程學(xué)報(bào) 2019年1期
關(guān)鍵詞:深度
蔡健榮,盧 越,白竣文,孫 力,肖紅偉
?
馬鈴薯薄片干燥過(guò)程形態(tài)變化三維成像
蔡健榮1,盧 越1,白竣文1,孫 力1,肖紅偉2
(1. 江蘇大學(xué)食品與生物工程學(xué)院,鎮(zhèn)江 212013;2. 中國(guó)農(nóng)業(yè)大學(xué)工學(xué)院,北京 100083)
為研究馬鈴薯薄片在干燥過(guò)程中形態(tài)變化規(guī)律,該文利用Kinect傳感器搭建了圖像采集平臺(tái),研究其在不同干燥溫度下(50、60、70、80 ℃)的形態(tài)變化規(guī)律。通過(guò)圖像采集平臺(tái)獲取馬鈴薯薄片深度圖像和彩色圖像,利用彩色圖像確定感興趣區(qū)域,對(duì)對(duì)應(yīng)區(qū)域的深度圖像進(jìn)行灰度值拉伸、閾值分割、邊緣去噪處理,進(jìn)而提取特征,計(jì)算出正投影面積的收縮率、深度均值及標(biāo)準(zhǔn)差,以表征馬鈴薯干燥過(guò)程中表面卷曲及平整度等形態(tài)指標(biāo)的變化規(guī)律。對(duì)不同干燥時(shí)間點(diǎn)馬鈴薯片進(jìn)行三維圖形顯示可觀察其變化規(guī)律明顯。統(tǒng)計(jì)結(jié)果表明:低溫(50 、60 ℃)與高溫(70 、80 ℃)對(duì)馬鈴薯薄片干燥時(shí)的收縮率、卷曲程度具有顯著影響(<0.05)。50 ℃時(shí)收縮率為54.97%,80℃時(shí)收縮率升高為64.55%;干燥溫度與馬鈴薯片卷曲程度呈先升后降的關(guān)系,60 ℃時(shí)卷曲度最大,其深度均值為27.81 mm,80 ℃時(shí)降低到18.86 mm。而四組溫度下,馬鈴薯薄片的平整度具有顯著性差異(<0.05),50 ℃時(shí)馬鈴薯片深度值的標(biāo)準(zhǔn)差為7.99 mm,80 ℃時(shí)降低至5.71 mm,說(shuō)明平整度隨著干燥溫度升高而增加。該研究可為馬鈴薯薄片干燥過(guò)程中形態(tài)變化的檢測(cè)提供參考,同時(shí)為干燥工藝的智能化控制提供技術(shù)依據(jù)。
干燥;傳感器;圖像處理;馬鈴薯片;形變規(guī)律
0 引 言
農(nóng)產(chǎn)品由于含水率高,季節(jié)性強(qiáng),上市量集中,若不及時(shí)處理較易腐爛變質(zhì)[1]。干燥是農(nóng)產(chǎn)品加工的一種重要的手段,通過(guò)降低農(nóng)產(chǎn)品含水率來(lái)抑制微生物的生長(zhǎng)繁殖以及生化反應(yīng)發(fā)生,延長(zhǎng)物料的貨架期[2]。農(nóng)產(chǎn)品物料通常具有較高的含水率和豐富的孔隙結(jié)構(gòu),在干燥過(guò)程中隨著水分的散失,物料中毛細(xì)管在應(yīng)力作用下發(fā)生縮小、塌陷和卷曲,導(dǎo)致物料形態(tài)在宏觀上發(fā)生明顯的收縮或卷曲現(xiàn)象[3]。而物料形態(tài)是重要的感官品質(zhì)指標(biāo),與包裝、儲(chǔ)運(yùn)等后續(xù)加工息息相關(guān)。
近年來(lái),越來(lái)越多的研究者將機(jī)器視覺(jué)(machine vision)應(yīng)用到物料干燥過(guò)程中色澤、形變和收縮等感官特性的研究。Nadian等[4]利用彩色相機(jī)實(shí)時(shí)采集蘋(píng)果片在熱風(fēng)干燥過(guò)程中的圖像,并利用多層人工神經(jīng)網(wǎng)絡(luò)得到蘋(píng)果片的色澤變化規(guī)律。Sampson等[5]利用頂部和側(cè)面2個(gè)相機(jī),分別采集蘋(píng)果片的圖像并計(jì)算投影面積和厚度,進(jìn)而計(jì)算其干燥過(guò)程中體積的變化。Ortiz-García-Carrasco等[6]利用相機(jī)采集土豆條在熱風(fēng)干燥過(guò)程中截面的形狀變化,進(jìn)而評(píng)估土豆條在干燥過(guò)程中的收縮變化。Onwude等[7]將計(jì)算機(jī)視覺(jué)和激光散射成像系統(tǒng)組合應(yīng)用,研究甘薯干燥過(guò)程中的含水率及顏色變化。綜上可知,現(xiàn)有研究基本局限于二維圖像的采集,但物料干燥過(guò)程中的收縮和形變是三維空間的變化,僅采集二維圖像無(wú)法精確、全面地反應(yīng)物料的形態(tài)變化。為解決這一問(wèn)題,更好的探明物料在干燥過(guò)程中的形態(tài)變化規(guī)律,建立物料的三維圖像采集平臺(tái),獲取物料在干燥過(guò)程中形態(tài)的動(dòng)態(tài)變化過(guò)程勢(shì)在必行。
現(xiàn)有的三維立體視覺(jué)技術(shù)主要包括:雙目立體視覺(jué),TOF(time of flying)相機(jī)及三維掃描儀等。Kinect傳感器具有經(jīng)濟(jì)高效的特點(diǎn),可以同時(shí)采集彩色圖像和深度圖像[8],其深度圖像獲取基于TOF原理[9],記錄物體與傳感器之間的距離,兩者之間無(wú)障礙物時(shí),可以通過(guò)深度信息將物體與背景分離[10],進(jìn)而獲取到物體的三維結(jié) 構(gòu)[11-16]。近年來(lái),Kinect傳感器在農(nóng)業(yè)方面的應(yīng)用已有研究報(bào)道,付代昌等[17]以溫室番茄盆栽作物為研究對(duì)象,提出了一種基于Kinect立體視覺(jué)系統(tǒng)的作物莖干特征提取與分析算法。沈躍等[18]以綠色植株為目標(biāo),提出了基于Kinect傳感器的溫室植株綠色與深度檢測(cè)方法,能夠?qū)σ欢ň嚯x范圍內(nèi)的綠色植株目標(biāo)進(jìn)行檢測(cè),并提出一種基于Kinect彩色和深度雙信息特征源的圖像拼接方法,降低圖像拼接時(shí)間,提高匹配準(zhǔn)確率[19]。肖珂等[20]使用Kinect傳感器融合彩色和深度圖像信息,建立了一套軟件路徑規(guī)劃算法和硬件噴施實(shí)驗(yàn)平臺(tái)相結(jié)合的系統(tǒng),實(shí)現(xiàn)葡萄園的精準(zhǔn)噴施。但目前的研究主要集中于農(nóng)作物外觀的檢測(cè)及分析,食品加工過(guò)程中物料形變的三維數(shù)據(jù)采集尚無(wú)相關(guān)報(bào)道。
本文以馬鈴薯為原料,利用Kinect傳感器采集馬鈴薯片干燥過(guò)程中的彩色圖像和深度圖像,利用其彩色信息確定馬鈴薯片區(qū)域,利用其深度圖像信息計(jì)算表面卷曲及面積變化,實(shí)現(xiàn)干燥過(guò)程中形態(tài)變化的快速檢測(cè),以期為物料干燥過(guò)程中品質(zhì)變化檢測(cè)提供參考。
1 材料和方法
1.1 試驗(yàn)材料
試驗(yàn)選用新鮮馬鈴薯,購(gòu)于江蘇大學(xué)附近農(nóng)貿(mào)市場(chǎng)。采用真空干燥方法(干燥溫度為70 ℃,干燥時(shí)間為24 h,壓強(qiáng)為6 kPa)測(cè)定馬鈴薯初始的濕基含水率約為82.7%± 0.5%。
1.2 干燥設(shè)備
試驗(yàn)使用設(shè)備為自制隧道式熱風(fēng)干燥機(jī),如圖1所示,干燥室內(nèi)溫度控制精度為±1 ℃,濕度控制精度為±3%。
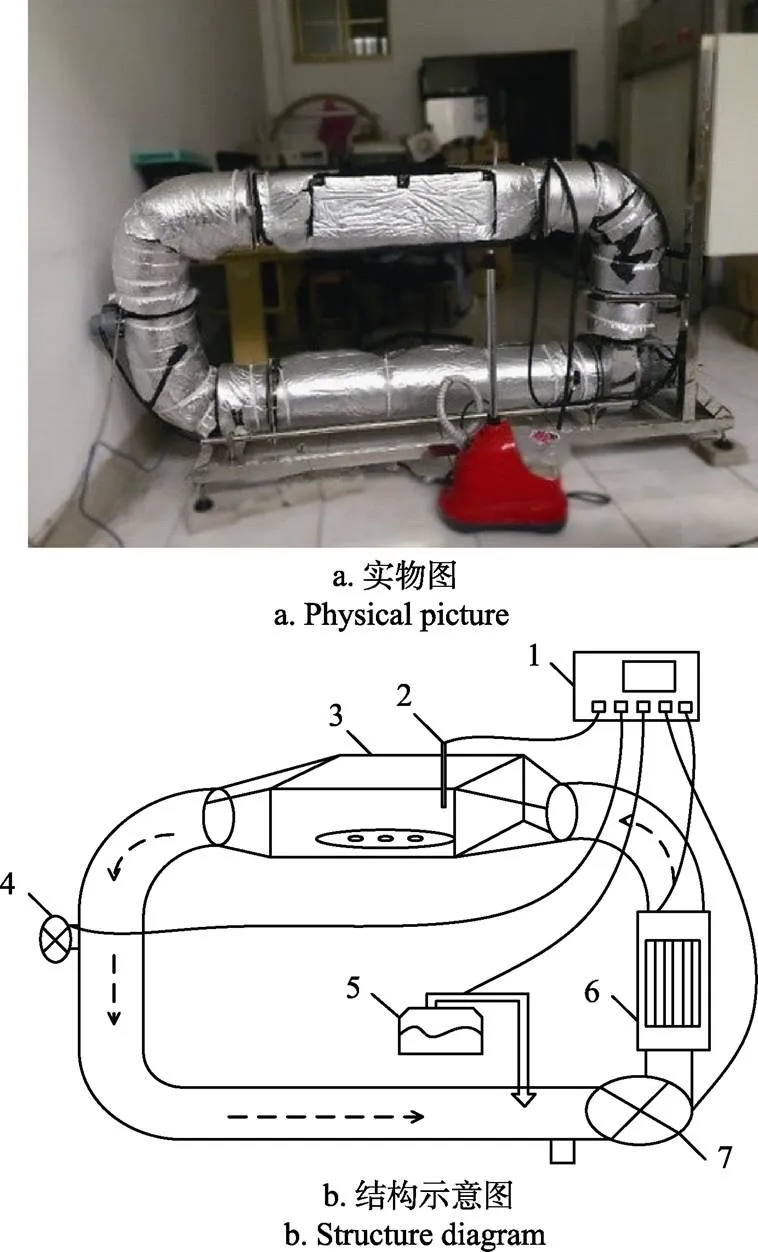
1. 控制箱 2. 溫濕度傳感器 3. 干燥室 4. 排濕風(fēng)機(jī) 5. 蒸汽加濕器 6. 加熱裝置 7. 離心風(fēng)機(jī)
1.3 干燥參數(shù)及試驗(yàn)設(shè)計(jì)
馬鈴薯干燥過(guò)程受溫度、空氣濕度、氣壓等因素的影響。聞陶等[21]研究結(jié)果表明,溫度是馬鈴薯干燥的主要影響因素,空氣濕度和流速對(duì)馬鈴薯的干燥也有一定的影響,濕度小,空氣流速快,干燥速度快。Hafezi等[22]研究片狀馬鈴薯干燥時(shí)的切片厚度及紅外輻射功率對(duì)其收縮率的影響,結(jié)果表明厚度為1 mm,紅外輻射功率為100 W時(shí)馬鈴薯片收縮最大。因此固定馬鈴薯薄片厚度為1 mm,空氣濕度為15%,風(fēng)速為3 m/s,研究不同溫度下馬鈴薯薄片的形態(tài)變化規(guī)律。
將馬鈴薯經(jīng)清洗、去皮后,切成1 mm厚薄片狀,樣本初始長(zhǎng)軸為:(6.82±0.43)cm。選取3塊厚度均勻的樣本平鋪于熱風(fēng)干燥機(jī)的托盤(pán)上,固定風(fēng)速和空氣濕度,研究不同干燥溫度(50、60、70、80 ℃)下馬鈴薯薄片的形態(tài)變化。干燥過(guò)程中,每隔10 min取出物料進(jìn)行圖像采集,并用天平測(cè)量質(zhì)量變化,直至達(dá)到安全貯藏含水率6%時(shí)停止干燥。
1.4 圖像采集平臺(tái)及檢測(cè)精度
圖2為圖像采集平臺(tái)示意圖。Kinect V2傳感器(微軟公司,美國(guó))彩色圖像分辨率為1 920×1 080,深度圖像分辨率為512×424,水平方向的可視角度為70°,垂直方向的可視角度為60°,有效的視野范圍為0.5~4.5 m[23],深度圖像精度為16位,每一灰度值代表1 mm深度。為避免背景干擾選用透明的物料托盤(pán)。
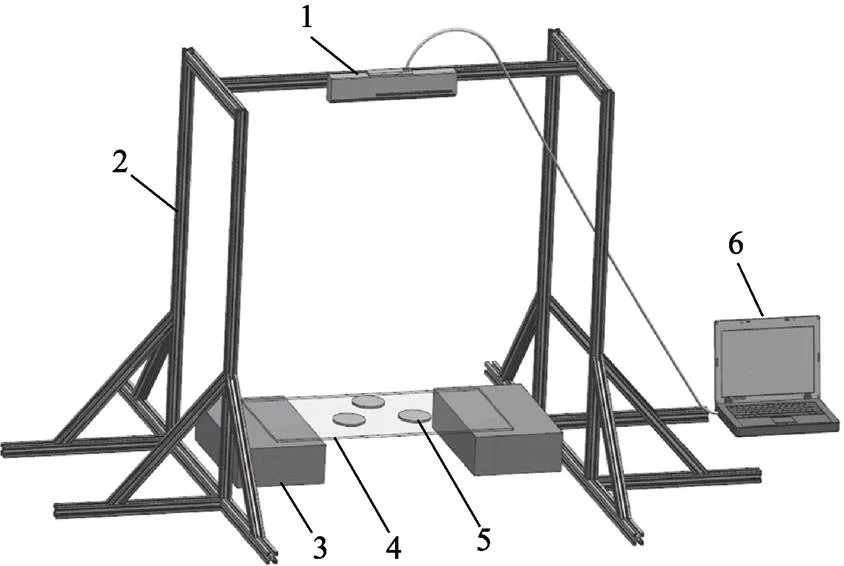
1. Kinect傳感器 2. 傳感器支架 3. 托盤(pán)底座 4. 物料托盤(pán) 5. 物料 6. 電腦
為驗(yàn)證Kinect圖像采集平臺(tái)的檢測(cè)精度,將經(jīng)過(guò)游標(biāo)卡尺校驗(yàn)的邊長(zhǎng)分別為5、8和10 mm的標(biāo)準(zhǔn)立方體并排放置在物料托盤(pán)上,采集深度圖像和彩色圖像,通過(guò)上述圖像處理方法獲取其深度數(shù)據(jù),并與實(shí)際尺寸進(jìn)行對(duì)比。圖3a為獲取的立方塊的深度圖,由于存在邊緣散射加之體積較小,圖像邊緣模糊不清,無(wú)法擬合出方形區(qū)域。為此采用尋找最高點(diǎn)的方式檢驗(yàn)圖像深度采集精度,圖3b為立方體深度圖像的三維顯示,明顯可見(jiàn)其深度變化。由此可以證明深度檢測(cè)精度<2 mm。馬鈴薯片在實(shí)際干燥過(guò)程最終深度均值>15 mm,因此可滿足檢測(cè)需求。
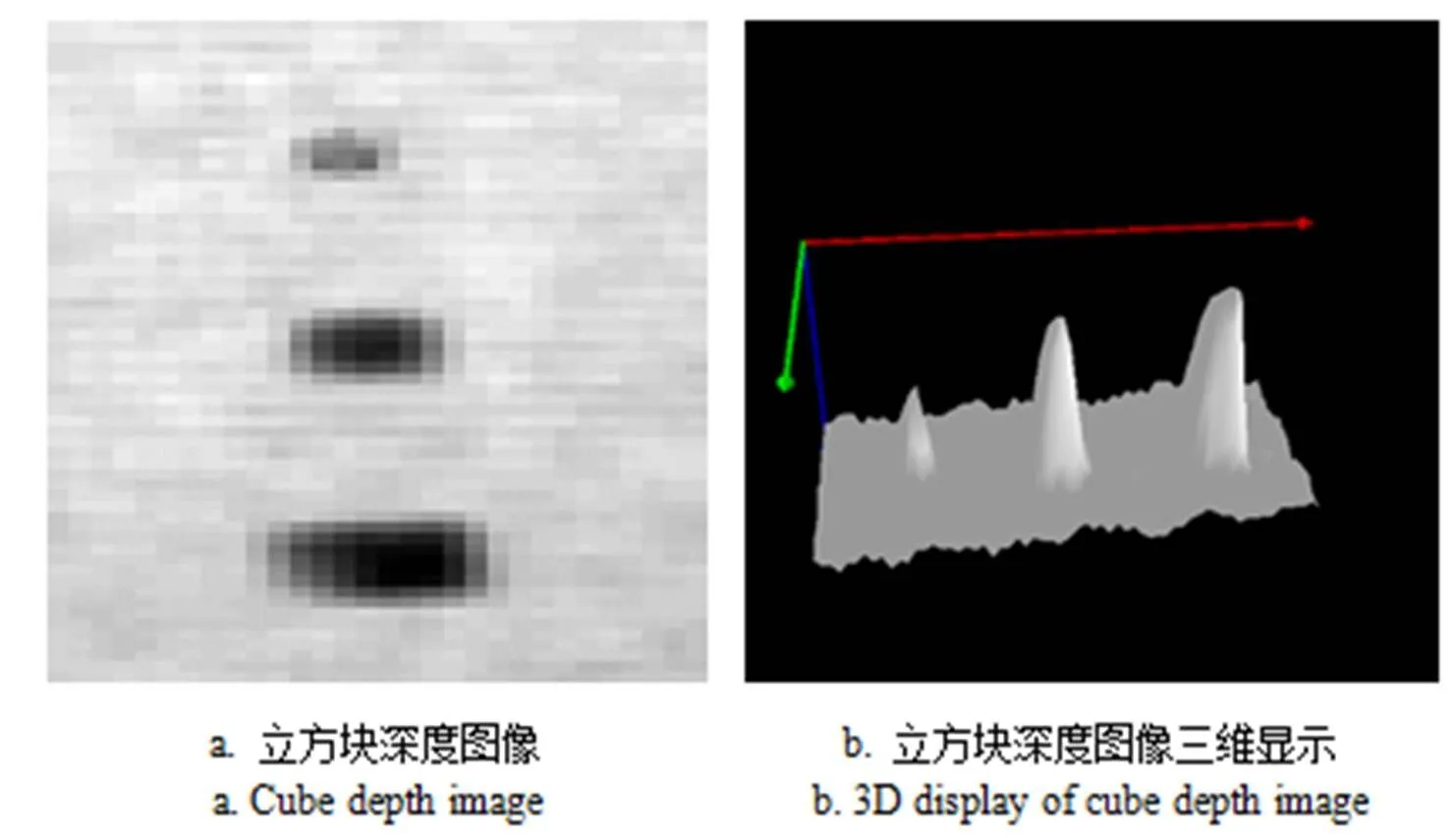
注:圖3b為圖3a的三維顯示圖像,z軸表示深度值,從左至右依次表示邊長(zhǎng)為5、8、10 mm立方塊。
1.5 圖像處理
1.5.1 圖像分割
由于Kinect傳感器的深度攝像頭和彩色攝像頭位于不同位置,兩者像素點(diǎn)之間不存在一一對(duì)應(yīng)關(guān)系,調(diào)用Kinect SDK函數(shù)校正彩色圖像,實(shí)現(xiàn)彩色圖像與深度圖像一一對(duì)應(yīng)的關(guān)系[24]。
根據(jù)校正圖像中物料所在位置,建立感興趣區(qū)域(region of interest,ROI),即馬鈴薯片所在區(qū)域,深度圖像中馬鈴薯片位于相同坐標(biāo)位置,圖4a、4b分別為校正圖像及與之對(duì)應(yīng)深度圖像的ROI區(qū)域。物料托盤(pán)與鏡頭的距離為640 mm,將圖4b做灰度拉伸處理,去除托盤(pán)與鏡頭距離信息,增強(qiáng)圖像對(duì)比度,結(jié)果如圖4c所示,再進(jìn)行閾值分割后得到圖4d所示馬鈴薯片區(qū)域。
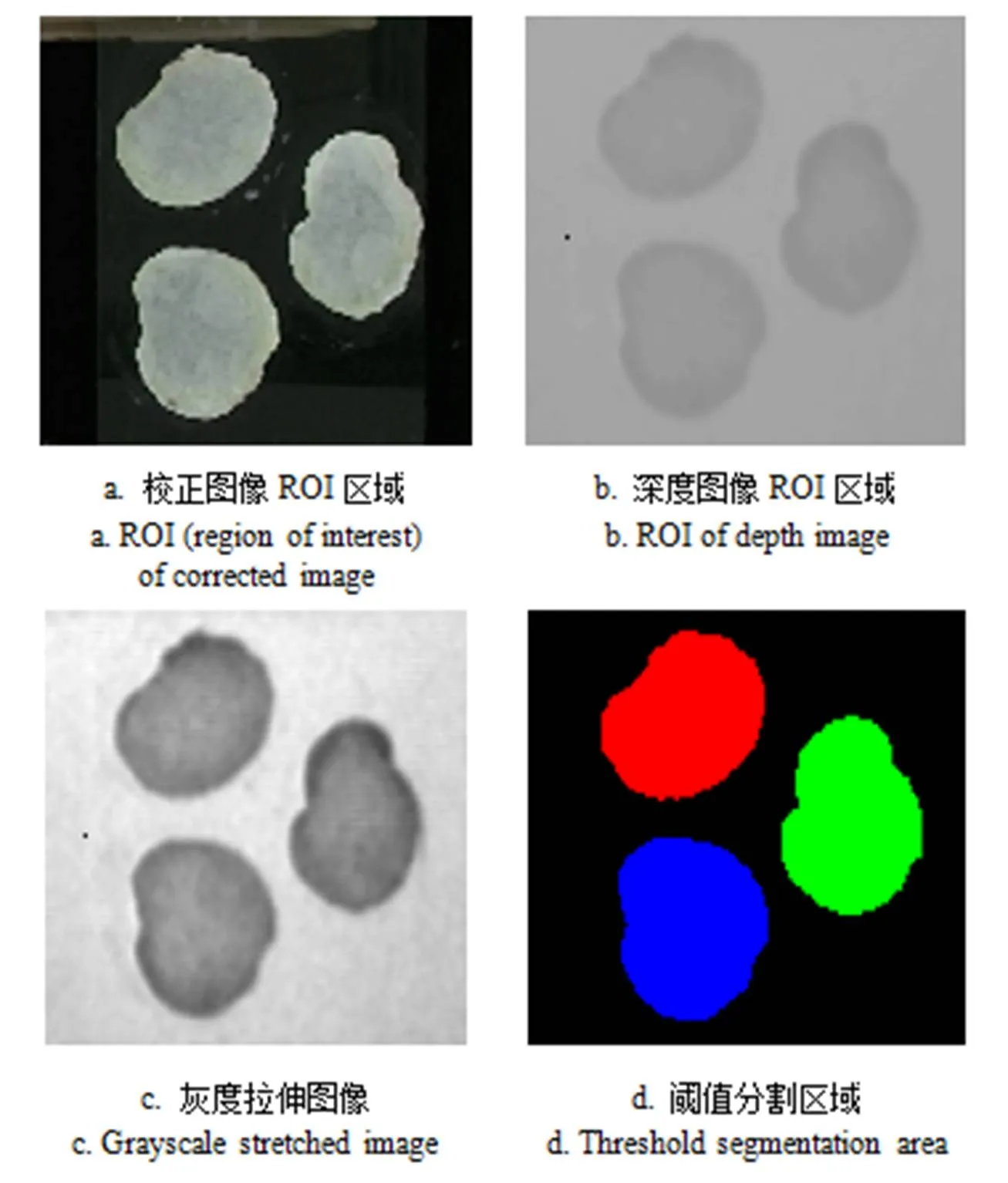
圖4 馬鈴薯片圖像的分割過(guò)程
1.5.2 邊緣噪聲去除
Kinect傳感器采用紅外激光照射目標(biāo)以獲得深度圖像,這會(huì)使馬鈴薯片邊緣產(chǎn)生不規(guī)則反射,導(dǎo)致邊緣模糊并擴(kuò)大,造成深度測(cè)量誤差[25]。如圖5a所示。通常馬鈴薯片卷曲后會(huì)形成不規(guī)則曲面,但其內(nèi)部灰度值呈連續(xù)變化,而邊緣處受噪聲干擾后灰度值產(chǎn)生突變,根據(jù)這一原理,通過(guò)低通濾波即可恢復(fù)原有形態(tài),結(jié)果如圖5b所示。
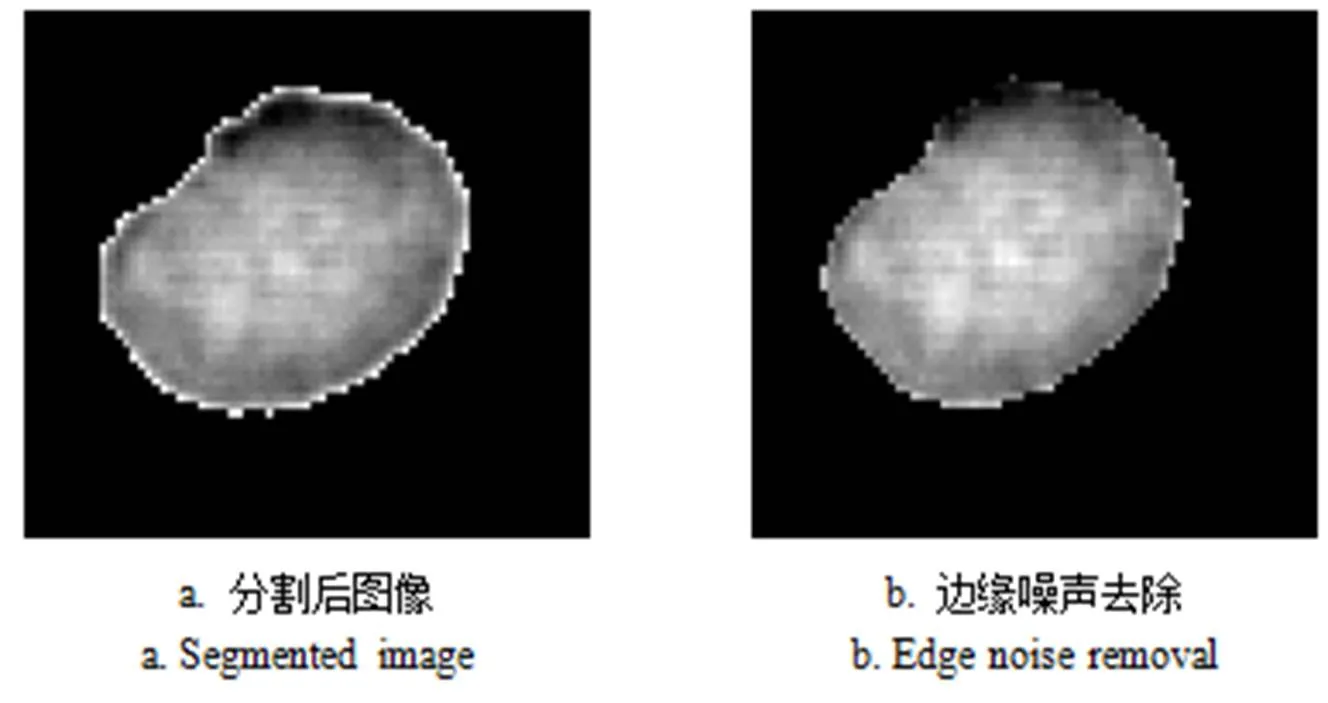
圖5 邊緣噪聲去除過(guò)程
1.6 數(shù)據(jù)處理
統(tǒng)計(jì)馬鈴薯片深度圖像的像素點(diǎn)個(gè)數(shù)可得到正投影面積,由于深度圖像中像素點(diǎn)的灰度值即為該點(diǎn)的深度值,因此同時(shí)可計(jì)算出所有像素點(diǎn)的深度均值以及標(biāo)準(zhǔn)差。繪制不同溫度、不同烘干時(shí)間下馬鈴薯片的正投影面積的收縮率、深度均值及標(biāo)準(zhǔn)差曲線,即可描述馬鈴薯片在干燥過(guò)程中的形變規(guī)律。
1.6.1 干基含水率的計(jì)算
以絕對(duì)干物料為基準(zhǔn)的濕物料中的含水率稱之為干基含水率,其計(jì)算公式[26]如式(1)。
式中M為干燥至?xí)r刻的干基含水率,g/g;W為時(shí)刻的物料質(zhì)量,g;為物料的干物質(zhì)質(zhì)量,g;終止條件為達(dá)到安全貯藏含水率6%。
1.6.2 收縮率的計(jì)算
根據(jù)干燥時(shí)間序列獲取馬鈴薯片的正投影面積后,根據(jù)公式(2)[27]計(jì)算馬鈴薯片正投影面積的降低比率,即收縮率。
式中為收縮率,%;0為馬鈴薯片干燥前的正投影面積,pixel;A為時(shí)刻馬鈴薯片的正投影面積,pixel。
1.6.3 深度均值的計(jì)算
如圖6所示,干燥初始階段物料未發(fā)生形變,值最大;物料發(fā)生卷曲形變后,值逐漸減小。采用深度均值表征物料干燥過(guò)程中卷曲形變程度,其計(jì)算公式如下
式中Mean為深度均值,為干燥初始階段馬鈴薯薄片深度圖像中所有像素點(diǎn)的集合,為物料形變后馬鈴薯薄片深度圖像中所有像素點(diǎn)的集合,()為點(diǎn)的深度值,(p)為p點(diǎn)的深度值,為集合中點(diǎn)的個(gè)數(shù),為集合中點(diǎn)的個(gè)數(shù)。
1. Kinect傳感器 2. 物料 3. 底座 4. 物料托盤(pán)
1. Kinect sensor 2. Material 3. Tray base 4. Material tray
注:、1為、p點(diǎn)到Kinect傳感器的距離。
Notes:and1are the distance betweenpoint andppoint to the Kinect sensor.
圖6 物料干燥時(shí)形態(tài)示意圖
Fig.6 Schematic diagram of material shape during drying
1.6.4 數(shù)據(jù)處理方法
干燥溫度選取了50、60、70、80 ℃ 4個(gè)梯度,做圖和數(shù)據(jù)分析時(shí)采用平均值±標(biāo)準(zhǔn)差。為了確保試驗(yàn)的準(zhǔn)確性,減小試驗(yàn)誤差,繪制干燥曲線時(shí)分別計(jì)算3片馬鈴薯片的收縮率、深度均值及標(biāo)準(zhǔn)差。數(shù)據(jù)處理使用Excel2013(微軟公司,美國(guó))和Origin8.0軟件(OriginLab公司,美國(guó))。
2 結(jié)果與分析
2.1 溫度對(duì)馬鈴薯薄片干燥時(shí)收縮率的影響
由圖7可知,低溫(50、60 ℃)與高溫(70、80 ℃)對(duì)馬鈴薯干燥后的收縮率具有顯著性的差異(<0.05)。溫度為50 ℃時(shí),馬鈴薯片最終收縮率為54.97%,溫度升高至80 ℃時(shí),其最終收縮率達(dá)到64.55%。收縮現(xiàn)象與物料在脫水時(shí)內(nèi)外壓力不平衡產(chǎn)生的收縮應(yīng)力有關(guān)[28],當(dāng)溫度高時(shí),內(nèi)外壓差大,應(yīng)力增大,因此收縮率越大,與文獻(xiàn)[29]提到的高溫可以提高水分的擴(kuò)散率,有利于樣品組織及顯微結(jié)構(gòu)的固定,從而提高收縮率的結(jié)果相同。曲線的斜率可以反映出馬鈴薯片干燥過(guò)程中面積收縮的速率。干燥初期,馬鈴薯片收縮緩慢是由于物料中存在大量的水分,毛細(xì)管壁上承受的壓差較小,而這種壓差是收縮產(chǎn)生的主要原因[30];干燥中期,馬鈴薯片的收縮率與含水率呈線性關(guān)系,與文獻(xiàn)[29]中描述結(jié)果類似;但干燥后期,馬鈴薯片的收縮率變化與文獻(xiàn)[29]中檸檬片含水率達(dá)到一定程度收縮率不變的結(jié)果不同,可能是由于馬鈴薯片質(zhì)地均勻而檸檬片外表質(zhì)地硬而內(nèi)部質(zhì)地軟 有關(guān)。
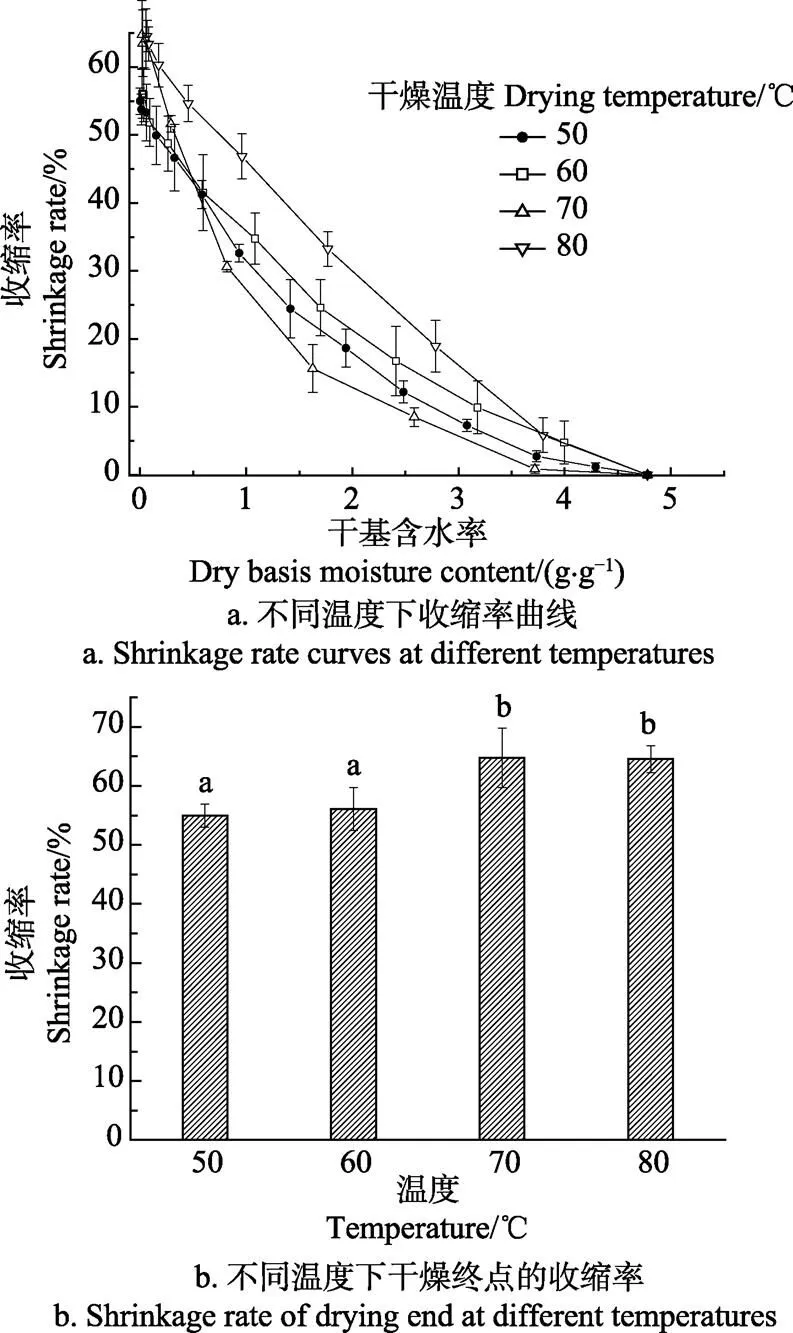
注:不同字母a, b表示不同溫度時(shí)收縮率差異性顯著(P <0.05),相同字母表示差異性不顯著,下同。
2.2 溫度對(duì)馬鈴薯薄片干燥時(shí)表面卷曲的影響
卷曲是物料干燥時(shí)其固體骨架在縱向形變?cè)斐桑疚挠蒙疃染当硎尽N锪虾瘦^高時(shí)骨架處于彈性狀態(tài),容易產(chǎn)生卷曲形變[31]。不同溫度下馬鈴薯片干基含水率與其深度均值的曲線如圖8所示,深度均值越大表明干燥過(guò)程中物料的卷曲程度越大。由圖8可知,低溫(50、60 ℃)與高溫(70、80 ℃)對(duì)馬鈴薯片干燥時(shí)的表面卷曲具有顯著影響(<0.05),隨著干基含水率的降低,馬鈴薯片卷曲逐漸增大。60 ℃時(shí)深度均值最大,達(dá)到27.81 mm,80 ℃時(shí)降低到18.86 mm。文獻(xiàn)[31]認(rèn)為物料形態(tài)與其固體骨架的流動(dòng)性有關(guān),高溫時(shí)物料干燥速率快,干燥耗時(shí)少,其固體骨架由彈性狀態(tài)快速轉(zhuǎn)化為玻璃態(tài),所造成的卷曲形變小。與上述收縮現(xiàn)象類似,干燥初期,物料主要蒸發(fā)非結(jié)合態(tài)的水分,產(chǎn)生形變小;干燥中期,物料毛細(xì)管及固體骨架中的水分開(kāi)始向外遷移,卷曲程度逐漸增大;干燥后期,各溫度條件下深度均值變化相同,但高溫條件下,物料轉(zhuǎn)化成玻璃態(tài)的速度快,因此造成的卷曲形變小。
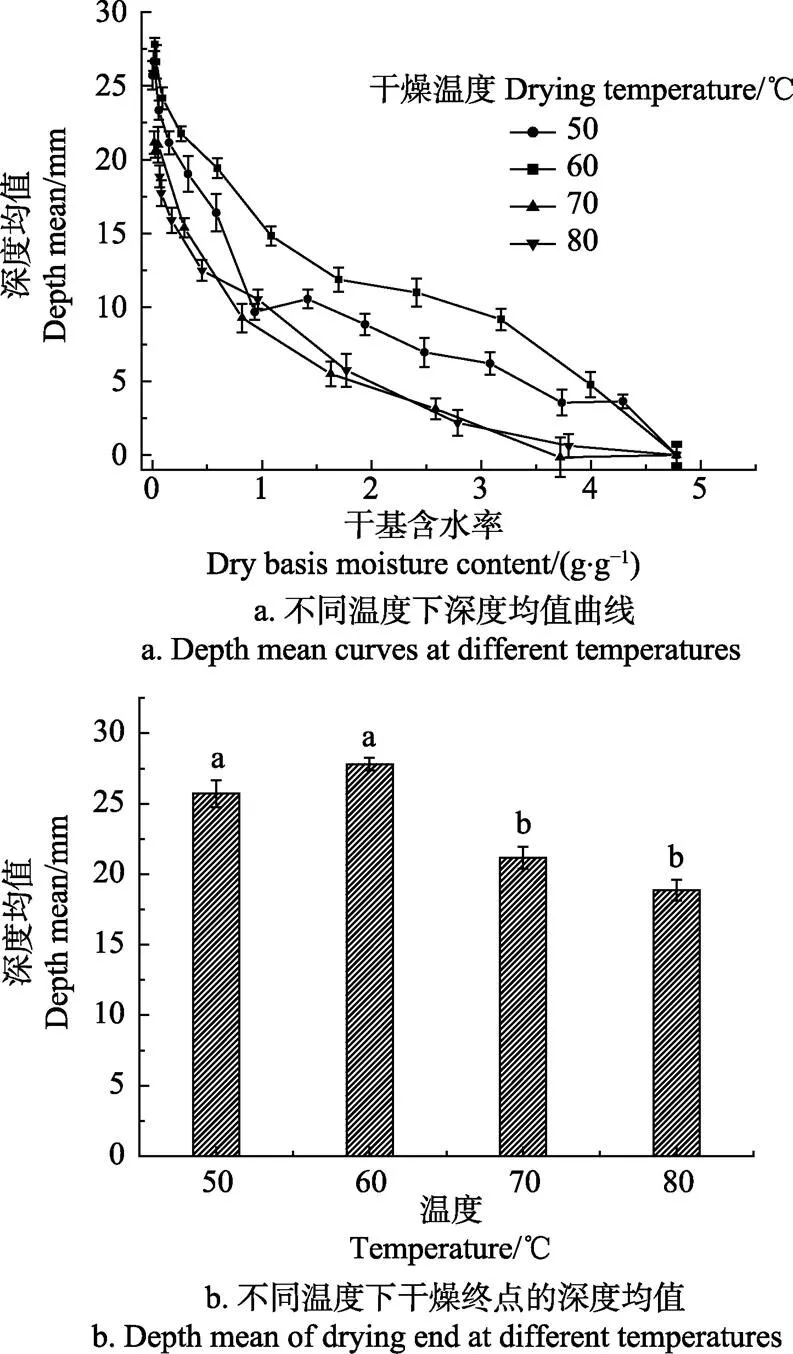
圖8 溫度對(duì)馬鈴薯片干燥時(shí)表面卷曲的影響
2.3 溫度對(duì)馬鈴薯薄片干燥時(shí)平整度的影響
標(biāo)準(zhǔn)差反映的是數(shù)據(jù)離散程度,文獻(xiàn)[32]采用標(biāo)準(zhǔn)差反映不規(guī)則物體的平整度。圖9為不同溫度下馬鈴薯片干基含水率與深度值標(biāo)準(zhǔn)差的曲線。由圖可知,溫度對(duì)馬鈴薯片表面平整度具有顯著影響(<0.05),干燥溫度越高,干燥終點(diǎn)深度值的標(biāo)準(zhǔn)差越小,即表面更平整。50 ℃時(shí)標(biāo)準(zhǔn)差為7.99,80 ℃時(shí)降低至5.71。按照文獻(xiàn)[31]中物料固體骨架流動(dòng)性的理論,其原因與卷曲現(xiàn)象類似,即溫度高時(shí),干燥時(shí)物料固體骨架更快地由彈性狀態(tài)轉(zhuǎn)化為玻璃態(tài)。干燥前中期,不同溫度條件下物料深度值標(biāo)準(zhǔn)差變化相似,是由于物料含水率高,固體骨架處于彈性狀態(tài);干燥后期,深度值標(biāo)準(zhǔn)差達(dá)到最大值后又出現(xiàn)回落,可能是因?yàn)槲锪蟽?nèi)部水分?jǐn)U散速率小于外部水分蒸發(fā)速率,水分蒸發(fā)時(shí)產(chǎn)生的應(yīng)力作用減小,物料固體骨架產(chǎn)生自我穩(wěn)定的過(guò)程。
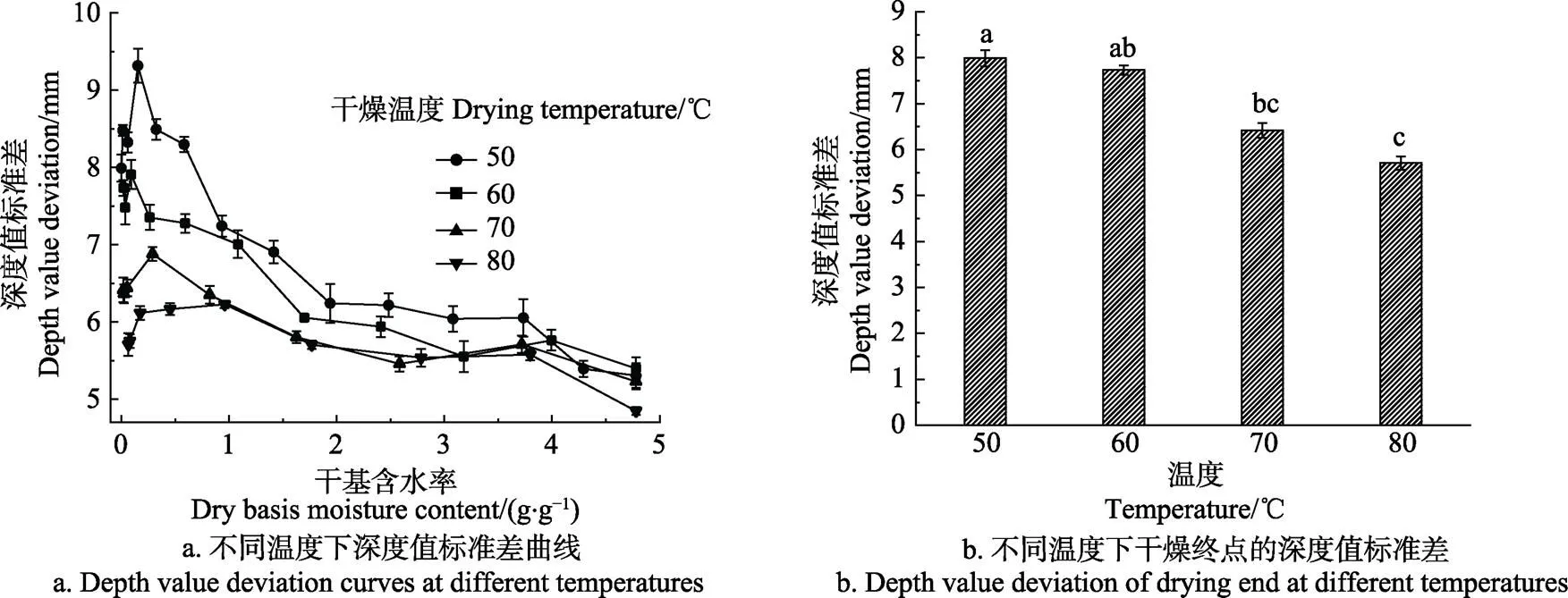
圖9 溫度對(duì)馬鈴薯片干燥時(shí)表面平整度的影響
為了直觀分析馬鈴薯片在干燥過(guò)程中形態(tài)變化,利用MATLAB軟件(MathWorks公司,美國(guó))先對(duì)深度圖取反處理,再調(diào)用Surf函數(shù)顯示三維圖形。由于干燥 80 min后物料的形態(tài)變化不明顯,因此僅選取干燥時(shí)間在80 min內(nèi)(間隔20 min)的深度圖進(jìn)行顯示,結(jié)果如圖10所示。由圖10可見(jiàn),隨著干燥時(shí)間的增加,馬鈴薯片投影方向面積不斷收縮,卷曲程度不斷增加,平整度不斷降低。
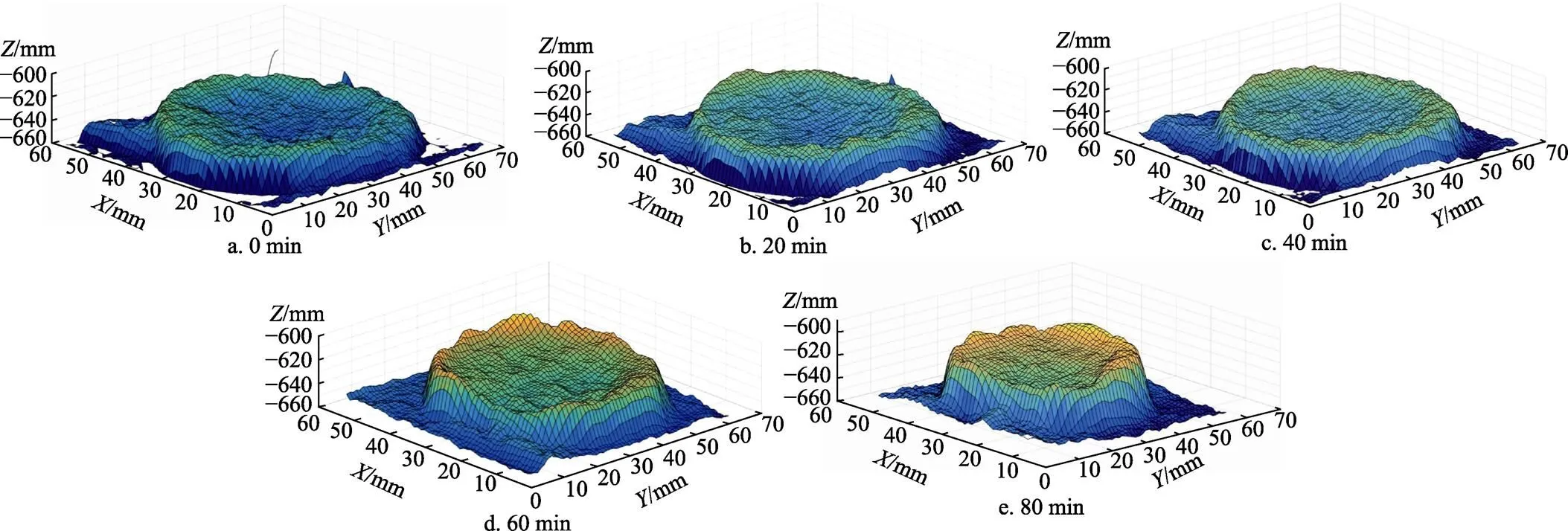
圖10 不同干燥時(shí)間下馬鈴薯片三維曲面圖
3 討 論
馬鈴薯薄片干燥后呈現(xiàn)的三維形態(tài)復(fù)雜且多樣,文獻(xiàn)[29]提出高溫可以提高收縮率的結(jié)果與本研究相同,文獻(xiàn)[31]提出的固體骨架理論可解釋卷曲程度和平整度2個(gè)形態(tài)指標(biāo),但相關(guān)研究報(bào)道較少,且本研究數(shù)據(jù)樣本較少,研究結(jié)果具有一定的局限性;馬鈴薯薄片干燥過(guò)程中其形態(tài)變化規(guī)律受溫度、空氣濕度、切片厚度、風(fēng)速以及吹拂角度等多種因素影響,如文獻(xiàn)[22]研究結(jié)果表明切片厚度小,紅外輻射功率小時(shí),其收縮形變大,而壓強(qiáng)對(duì)其影響不明顯,本文僅研究溫度對(duì)其形態(tài)變化的影響,其它因素將是下一步研究的重點(diǎn);基于三維圖像研究馬鈴薯薄片干燥過(guò)程中形態(tài)變化規(guī)律,具有高效、無(wú)損傷等優(yōu)點(diǎn),未來(lái)有待使用更為精確的方法及大量的樣本,量化各因素在馬鈴薯薄片干燥過(guò)程中發(fā)揮的作用,從而為干燥工藝的智能化控制提供技術(shù)參考。
4 結(jié) 論
1)采用Kinect傳感器檢測(cè)馬鈴薯片在熱風(fēng)干燥時(shí)形態(tài)的變化。搭建了三維圖像采集平臺(tái),獲取物料的深度圖像和彩色圖像。對(duì)深度圖像和彩色圖像映射處理,使之一一對(duì)應(yīng)。利用彩色圖像確定感興趣區(qū)域,對(duì)同一區(qū)域的深度圖像進(jìn)行處理,提取區(qū)域面積、深度均值及標(biāo)準(zhǔn)差等參數(shù),進(jìn)而統(tǒng)計(jì)收縮率、表面卷曲及平整度變化趨勢(shì)。并使用MATLAB軟件顯示不同時(shí)間點(diǎn)馬鈴薯片三維圖像,可明顯觀察其形態(tài)變化情況。
2)試驗(yàn)結(jié)果表明:低溫(50、60 ℃)與高溫(70、80 ℃)對(duì)馬鈴薯薄片干燥時(shí)的收縮率、卷曲程度具有顯著影響(<0.05)。50 ℃時(shí)收縮率為54.97%,80℃時(shí)收縮率升高為64.55%;干燥溫度與馬鈴薯片卷曲程度呈先升后降的關(guān)系,60℃時(shí)卷曲度最大,其深度均值為 27.81 mm,80 ℃時(shí)降低到18.86 mm。而4個(gè)溫度下,馬鈴薯薄片的平整度具有顯著性差異(<0.05),50 ℃時(shí)馬鈴薯片深度值的標(biāo)準(zhǔn)差為7.99 mm,80 ℃時(shí)降低至5.71 mm,說(shuō)明平整度隨著干燥溫度升高而增加。
[1] 蘇丹,李樹(shù)君,趙鳳敏,等. 農(nóng)產(chǎn)品聯(lián)合干燥技術(shù)的研究進(jìn)展[J]. 農(nóng)機(jī)化研究,2014,36(11):236-240.
Su Dan, Li Shujun, Zhao Fengmin, et al. Advances in the combined drying technology of agricultural products[J] .Journal of Agricultural Mechanization Research, 2014, 36(11): 236-240. (in Chinese with English abstract)
[2] 吳海虹,朱道正,卞歡,等.農(nóng)產(chǎn)品干燥技術(shù)發(fā)展現(xiàn)狀[J].現(xiàn)代農(nóng)業(yè)科技,2016(14):279-281.
[3] 白竣文,田瀟瑜,劉宇婧,等.大野芋薄層干燥特性及收縮動(dòng)力學(xué)模型研究[J].中國(guó)食品學(xué)報(bào),2018,18(4): 124-130.
[4] Nadian M H, Rafiee S, Aghbashlo M, et al. Continuous real-time monitoring and neural network modeling of apple slices color changes during hot air drying[J]. Food & Bioproducts Processing, 2015,94:263-274.
[5] Sampson D J, Chang Y K, Rupasinghe H P V, et al. A dual-view computer-vision system for volume and image texture analysis in multiple apple slices drying[J]. Journal of Food Engineering, 2014,127(4):49-57.
[6] Ortiz-García-Carrasco B, Ya?ez-Mota E, Pacheco-Aguirre FM, et al. Drying of shrinkable food products: Appraisal of deformation behavior and moisture diffusivity estimation under isotropic shrinkage[J]. Journal of Food Engineering, 2015,144: 138-147.
[7] Onwude D I, Hashim N, Abdan K, et al. Combination of computer vision and backscattering imaging for predicting the moisture content and colour changes of sweet potato (L) during drying[J]. Computers & Electronics in Agriculture, 2018, 150: 178-187.
[8] 沈躍,徐慧,劉慧,等.基于K-means和近鄰回歸算法的Kinect植株深度圖像修復(fù)[J].農(nóng)業(yè)工程學(xué)報(bào),2016,32(19):188-194.Shen Yue, Xu Hui, Liu Hui, et, al. Kinect scanning plant depth image restoration based on K-means and K-nearest neighbor algorithms[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 188-194. (in Chinese with English abstract)
[9] 鄒廣群.基于TOF相機(jī)的深度圖增強(qiáng)算法研究[D].青島: 青島大學(xué),2016.
[10] 趙志平,陳雷月. 基于深度傳感器圖像分割技術(shù)的研究[J].信息技術(shù),2014(1):109-112.Zhao Zhiping, Chen Leiyue. Research on image segment technique based on Kinect[J]. Information Technology, 2014(1):109-112. (in Chinese with English abstract)
[11] 許常蕾,王慶,陳洪,等.基于體感交互的仿上肢采摘機(jī)器人系統(tǒng)設(shè)計(jì)與仿真[J].農(nóng)業(yè)工程學(xué)報(bào),2017,33(增刊1):49-55.Xu Changlei, Wang Qing, Chen Hong, et al. Design and simulation of artificial limb picking robot based on somatosensory interaction[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2017,33(Supp.1): 49-55.(in Chinese with English abstract)
[12] Meng Ming, Yang Fangbo, She Qingshan, et al. Human motion detection based on the depth image of Kinect[J]. Chinese Journal of Scientific Instrument, 2015, 36(2):386-393.
[13] Harte J M, Golby C K, Acosta J, et al. Chest wall motion analysis in healthy volunteers and adults with cystic fibrosis using a novel Kinect-based motion tracking system[J]. Medical & Biological Engineering & Computing,2016, 54(11):1631-1640.
[14] Sun Y, Li C, Li G, et al. Gesture recognition based on Kinect and sEMG signal fusion[J]. Mobile Networks & Applications,2018(1):1-9.
[15] Rosa-Pujazón A, Barbancho I, Tardón L J, et al. Fast-gesture recognition and classification using Kinect: An application for a virtual reality drumkit[J]. Multimedia Tools & Applications, 2016, 75(14):8137-8164.
[16] Gianaria E, Grangetto M, Balossino N. Kinect-based gait analysis for people recognition over time[C]//International Conference on Image Analysis and Processing. Catania: Springer, 2017:648-658.
[17] 付代昌,徐立鴻,李大威,等.基于Kinect的溫室番茄盆栽莖干檢測(cè)與分割[J].現(xiàn)代農(nóng)業(yè)科技,2014(3):336-338.
[18] 沈躍,徐慧,劉慧,等.基于Kinect傳感器的溫室植株綠色與深度檢測(cè)方法[J]. 中國(guó)農(nóng)機(jī)化學(xué)報(bào),2016,37(8): 155-161.
[19] 沈躍,朱嘉慧,劉慧,等. 基于深度和彩色雙信息特征源的Kinect植物圖像拼接[J]. 農(nóng)業(yè)工程學(xué)報(bào),2018,34(5):176-182. Shen Yue, Zhu Jiahui, Liu Hui, et, al. Plant image mosaic based on depth and color dual information feature source from Kinect[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(5): 176-182. (in Chinese with English abstract)
[20] 肖珂,高冠東,馬躍進(jìn). 基于Kinect視頻技術(shù)的葡萄園農(nóng)藥噴施路徑規(guī)劃算法[J]. 農(nóng)業(yè)工程學(xué)報(bào),2017,33(24):192-199. Xiao Ke, Gao Guandong, Ma Yuejin. Pesticide spraying route planning algorithm for grapery based on Kinect video technique[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 192-199. (in Chinese with English abstract)
[21] 聞陶,朱躍釗,孫慶梅,等. 馬鈴薯吸附干燥特性及模型擬合[J]. 生物加工過(guò)程,2006,4(3):56-61.
[22] Hafezi N,Sheikhdavoodi M J,Sajadiye S M,et al. Shrinkage characteristic of potato slices based on computer vision[J]. Agricultural Engineering International Cigr Journal, 2015, 17(3): 287-295.
[23] 夏春華,施瀅,尹文慶.基于TOF深度傳感的植物三維點(diǎn)云數(shù)據(jù)獲取與去噪方法[J].農(nóng)業(yè)工程學(xué)報(bào),2018,34(6):168-174.Xia Chunhua, Shi Ying, Yin Wenqing. Obtaining and denoising method of three-dimensional point cloud data of plants based on TOF depth sensor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2018,34(6): 168-174.(in Chinese with English abstract)
[24] Takenaka H, Wada T, Oike H, et al. Bilateral filtering based depth image correction consistent with color image captured by Kinect[J].Technical Report of Ieice Prmu,2012, 112: 311-316.
[25] 徐勝勇,黃偉軍,周俊,等. 使用Kinect傳感器的油菜葉片面積測(cè)量方法[J]. 中國(guó)油料作物學(xué)報(bào),2017,39(1):55-59.
[26] 劉小丹,張淑娟,賀虎蘭,等.紅棗微波-熱風(fēng)聯(lián)合干燥特性及對(duì)其品質(zhì)的影響[J].農(nóng)業(yè)工程學(xué)報(bào),2012,28(24):280-286.Liu Xiaodan, Zhang Shujuan, He Hulan, et al. Drying characteristics and its effects on quality of jujube treated by combined microwave-hot-air drying[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2012,28(24):280-286.(in Chinese with English abstract)
[27] 朱文魁,徐德龍,周雅寧,等.基于數(shù)字圖像分析法的片煙干燥收縮特性研究[J].河南農(nóng)業(yè)科學(xué),2014,43(7):160-164.
[28] 徐娓,丁靜,趙義,等.多孔物料干燥中物料體積的收縮特性[J].華南理工大學(xué)學(xué)報(bào):自然科學(xué)版,2006,34(8):61-65.
[29] Wang J, Law C L, Nema P K, et al. Pulsed vacuum drying enhances drying kinetics and quality of lemon slices[J].Journal of Food Engineering,2018,224:129-138.
[30] 王麗紅,高振江,張茜,等.加工番茄收縮特性的試驗(yàn)研究[J]. 食品科技,2011(8):102-105.
[31] Mayor L, Sereno A M. Modelling shrinkage during convective drying of food materials: A review[J]. Journal of Food Engineering, 2004, 61(3):373-386.
[32] 沈文超.不規(guī)則扁平粒狀物表面平整度識(shí)別與分選方法的研究[D].蘇州:蘇州大學(xué),2010.
Three-dimensional imaging of morphological changes of potato slices during drying
Cai Jianrong1, Lu Yue1, Bai Junwen1, Sun Li1, Xiao Hongwei2
(1.212013,;2.100083,)
Drying is an important method for agricultural products processing. It can reduce the moisture content of agricultural products to a certain extent and extend the shelf life. But irregular deformation resulting from drying process will cause inconvenience for subsequent processing. In order to study the regularity of deformation during the drying process of potato slices, we built an image acquisition platform based on the Kinect sensor. Firstly, we verified the accuracy of the depth detection of the Kinect image acquisition platform by cubes with 5, 8, and 10 mm sides. The results showed that the accuracy can reach 2 mm. Secondly, we selected potato as the research object and dried them using a tunnel hot air dryer. Controlled potato slice thickness was 1 mm, drying room humidity was 15%, hot wind speed was 3 m/s to study the deformation regularity of potato slice at different temperatures (50, 60, 70, 80 ℃). After the drying process began, the potato slices were taken out of the drying chamber and put on the Kinect image acquisition platform to acquire depth and color images, then weighed every 10 minutes. We used the Kinect SDK function to achieve a one-to-one correspondence between color images and depth images. According to the position of the material in the color image, the region where the potato slices were located of interest was established, and the potato slices were located at the same coordinate position in the depth image.Gray value stretching, threshold segmentation, and edge denoising were performed on the corresponding region of depth images. Then feature extraction was used to distinguish every potato slice and calculate its shrinkage rate, mean depth values and standard deviation. The mean depth value can reflect the curling of the potato slices during the drying process. The shrinkage rate could reflect the shrinkage characteristics of the potato slices in the drying process. And the standard deviation of the depth value could reflect the surface flatness of potato slices in drying process. Then we drew the curve of dry basis moisture content and the three parameters under different temperature conditions, which could be more directly to observe the effect of temperature on the deformation of potato slices during drying. The results showed that temperature had a significant effect on the shrinkage, surface curl, and surface flatness of the potato slices in the drying process (<0.05). With the increase of temperature, the shrinkage of potato slices increased gradually. At 50 ℃, the shrinkage rate was 54.97%. When the temperature rose to 80 ℃, the shrinkage rate increased to 64.55%. With the increase of temperature, the variation of curl and flatness of the potato chips was small. The mean depth value of the potato slices was 27.81 mm at 60 ℃, and it decreased to 18.86 mm at 80 ℃. At 50 ℃, the standard deviation of potato slices depth was 7.99 mm, which decreased to 5.71 mm at 80 ℃. Finally, using MATLAB software to display three-dimensional graphics of potato slices in five different time periods, the surface deformation of potato slices could be clearly observed. It was illustrated that the Kinect image acquisition platform could be applied to the study of deformation regularity in the drying process of potato slices, and provide technical basis for intelligent control of the drying process.
drying; sensor; image processing; potato slices; deformation regularity
2018-07-16
2018-10-26
國(guó)家重點(diǎn)研發(fā)計(jì)劃項(xiàng)目(2017YFD0400905);江蘇省自然科學(xué)基金項(xiàng)目(BK20160504)
蔡健榮,博士,教授,主要從事食品農(nóng)產(chǎn)品質(zhì)量快速無(wú)損檢測(cè)技術(shù)研究。Email:Jrcai@ujs.edu.cn
10.11975/j.issn.1002-6819.2019.01.034
TS255
A
1002-6819(2019)-01-0278-07
蔡健榮,盧 越,白竣文,孫 力,肖紅偉.馬鈴薯薄片干燥過(guò)程形態(tài)變化三維成像[J]. 農(nóng)業(yè)工程學(xué)報(bào),2019,35(1):278-284. doi:10.11975/j.issn.1002-6819.2019.01.034 http://www.tcsae.org
Cai Jianrong, Lu Yue, Bai Junwen, Sun Li, Xiao Hongwei.Three-dimensional imaging of morphological changes of potato slices during drying[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 278-284. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.01.034 http://www.tcsae.org
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:50
快樂(lè)學(xué)習(xí)報(bào)·教育周刊(2022年16期)2022-05-01 21:25:05
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設(shè)與管理(2015年15期)2015-03-20 15:18:57