便攜式水下機器人設計
2019-01-28 01:11:10裴國棟卞則武溫亞楠
船電技術 2019年1期
裴國棟,卞則武,溫亞楠
?
便攜式水下機器人設計
裴國棟,卞則武,溫亞楠
(青島市光電工程技術研究院,山東青島 266019)
出于對近海海洋探索的目的,本文應用了上次研究[1]的水下ROV空間姿態控制系統設計了一種便攜式水下機器人。該水下機器人系統硬件部分主要由電源模塊、無刷電調、遙控部分以及姿態傳感器模塊組成,軟件控制以及相關數據處理由一塊ARM-M3內核的處理器完成,編譯軟件使用Kile。水下機器人結構采用3D打印機制作,材料選用PLA。遙控通訊采用CAN總線協議。水下機器人經過實際調試可以達到相關技術要求,下潛深度100 M,能實現簡單的水下作業要求。
水下機器人 姿態檢測 水下探測
0 引言
機器人技術是集運動學與動力學理論、機械設計與制造技術、計算機硬件與軟件技術、控制理論、電動伺服隨動技術、傳感器技術、人工智能理論等科學技術為一體的綜合技術,它的研究與開發標志著一個國家科學技術的發展水平。
隨著人口數量的增長和科學技術水平的不斷提高,人類已把海洋作為生存和發展的新領域。海洋的開發與利用已經成為決定一個國家興衰的基本因素之一。從而使水下機器人具有更加廣闊的應用前景[8]。
水下機器人一般可以分為兩大類:一類是有纜水下機器人,習慣稱為遙控潛水器(Remote Operated Vehicle,簡稱ROV);另一類是無纜水下機器人。習慣稱為自治潛水器。(Autonomous Underwater Vehicle,簡稱AUV)。此外按使用的目的分有水下調查機器人(觀測、測量、試驗材料的收集等)和水下作業機器人(水下焊接、擰管子、水下建筑、水下切割等作業)。按活動場所分,有海底機器人和水中機器人,如今隨著國家海洋探索腳步的加快,水下機器人的研發以及應用也越來越重要。
1 系統硬件設計
1.1 水下控制系統
根據實際應用需求以及各方面綜合考量系統選用意法半導體(ST)的增強型處理器STM32f103C8T6芯片作為主處理器芯片,負責采集傳感器數據以及對水下機器人進行控制,攜帶的傳感器有姿態傳感器MPU6050(負責獲取水下機器人實時姿態,用于通過推進器閉環控制)、濕度傳感器DHT11(負責檢測電子倉密封性)以及一個模擬攝像頭,預留的數據接口有SPI、串口及IIC等,可根據后期需要掛載其他傳感器[2]。此外還留有的通訊接口有CAN以及RS485遙控暫用的CAN通訊接口。通訊線纜使用水下六芯雙絞屏蔽纜,分別用于傳輸控制信號、攝像頭模擬信號以及電源。水下機器人系統框圖圖如圖1所示。
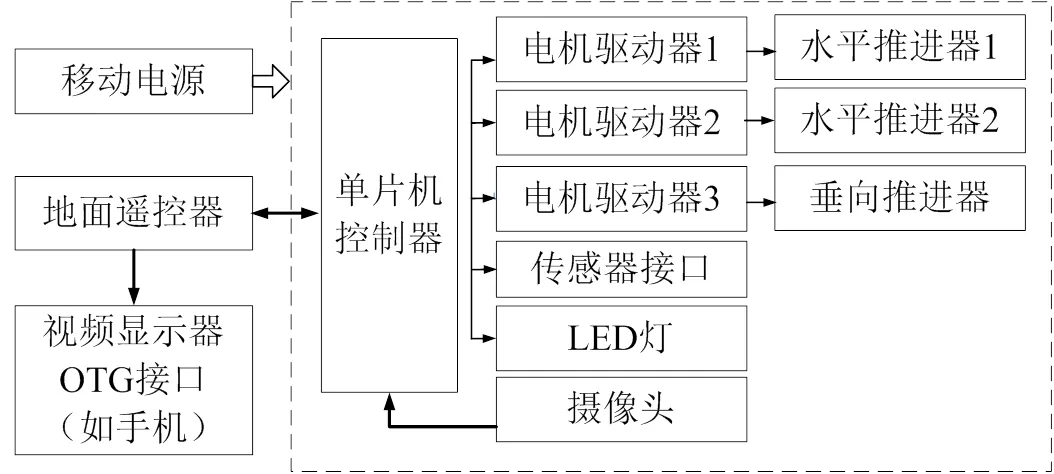
圖1 系統框圖
其他方面,推進器使用12 V供電,最大推力可達11 N,兩側推進器同時轉動,可使水下機器人的航速達到1 m/s。攝像頭選用的RunCam nano FPV迷你14*14 650TVL攝像頭,圖像清晰,視野廣闊。
1.2 水上遙控監控系統
水上遙控監控系統分為遙控器以及監控平臺,遙控器為四通道,其中三通道分別控制水下機器人的前-后、左-右以及升-潛,其余一個通道預留為控制水下視頻云臺。水下視頻采用移動終端來實時顯示,水下模擬視頻通過MicroUSB接口的視頻采集卡連接至手機或者PAD的MicroUSB接口,然后通過設備的OTG功能來實現數據傳輸以及顯示。此外遙控系統還預留了藍牙BLE接口,后期可通過藍牙將水下傳感器以及水下機器人實時狀態傳輸至移動終端顯示。
2 系統軟件設計
2.1 軟件設計思路
軟件部分采用C語言來實現相關代碼編寫,主要是因為C語言具有較好的移植性,開發環境采用Kile5,STM32使用3.5版本的函數庫。
水下機器人軟件系統主要使用了姿態融合算法以及傳統PID算法,考慮到控制的時效性相關算法均在5 ms定時器中斷內完成,此外遙控數據接收也是通過中斷來完成。大大保證了遙控數據的實時性,main函數里面做一些對實時性要求較低的工作。
2.2 C語言代碼的實現
初始化函數主要完成對中斷向量表、定時器中斷、CAN控制器、PWM以及其他外設的初始化工作[3]。以下是幾個主要的控制函數:
NVIC_Configuration():設置NVIC中斷分組
RobotWH_Init():初始化硬件底層
moto_PwmRflash(&Can_data_step[0]):將推進器數據送達至相應PWM端口
RC_Analy():通訊協議的編解碼
Prepare_Data():傳感器數據的采集
Get_Attitude():態解算函數[6][7]
Control(angle.roll,angle.pitch,0):通過解算的姿態數據進行PID閉環控制。[8]

3 系統結構設計
便攜式水下機器人整體采用流線型設計,整體尺寸為298×297×149 m。采用三個推進器為水下機器人提供動力,在水下機器人的中間位置設計有垂向推進器,左、右兩側位置設計有水平推進器。通過三個推進器即可實現水下機器人在各個方向的運動。水下機器人的整體結構如圖2所示。
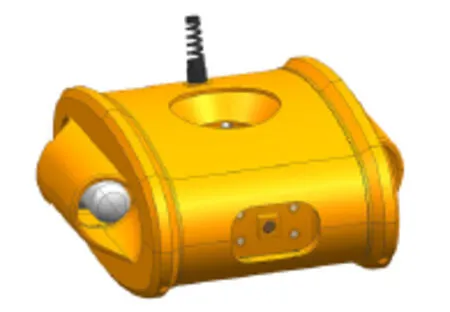
圖2 水下機器人整體結構圖
水下機器人的殼體分為上蓋和下蓋,均采用3D打印的方式制造。兩側的水平推進器通過安裝架,安裝在下蓋左、右兩側的涵道內,中間的垂向推進器安裝在上蓋的垂向涵道內,用于實現水下機器人的上浮和下潛。左、右兩側的推進器差速轉動,可實現水下機器人的轉向運動。
內部設計有兩個密封艙,分別安裝在下蓋的前后位置。后密封艙為電源艙,內部放置一個容量為6000 Ah的鋰電池,為水下機器人提供能源,可實現水下機器人45分鐘左右不間斷工作。前密封艙為控制艙,內置有小型攝像頭,LED燈和水下機器人的控制系統。
主體使用的是高透明亞克力材質,厚度為3 m,可承受100 深的水壓。兩側的艙蓋使用光固化3D打印方式加工制作,具有成型精度高的優點。密封艙與艙蓋之間通過O型密封圈進行密封[4],電源線和控制線纜等通過水下穿線螺栓穿過艙蓋[5]。其中,控制線纜穿出密封艙后,通過線卡穿出上蓋。線卡固定在上蓋的安裝孔上,線卡內部有壓緊螺栓可以將線纜固定。控制線纜連接地面遙控器,可以傳輸視頻信號和控制信號。水下機器人的最大下潛深度可達100米。水下機器人的內部結構如圖3所示。1-殼體,2-推進器,3-電源艙,4-線卡,5-控制艙,6-攝像頭
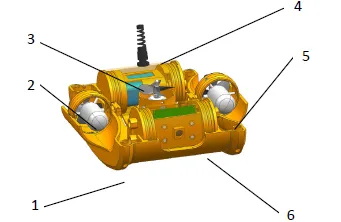
圖3 水下機器人內部結構圖
4 結論
將機器人樣機放于體積4*3*3的水箱中測試機器人速度、俯仰角度、視頻清晰度以及遙控穩定性等指標均達到實際應用水平,因此,本課題所研制的便攜式水下機器人系統經初步測試可以達到實際需求,其中各項數據為取多次實驗值去掉最大與最小值然后取平均值的方法獲得,其中速度1.45 /s,靜水最大傾斜角度48度,具有多方向實際應用推廣性。
[1] 裴國棟, 溫亞楠, 朱莉莉. 用于水下ROV控制的姿態融合技術研究[J]. 船電技術, 2018, (04): 56-58.
[2] 劉火良. STM32庫開發實戰指南[M]. 北京: 械工業出版社, 2017: 20-43.
[3] 張新民, 段洪琳. ARM Cortex嵌入式開發與應用[M]. 北京: 清華大學出版社, 2016: 14-21.
[4] 羅伯特.諾頓, 黃平.譯. 機械設計[M]. 北京: 機械工業出版社, 2016: 33-52.
[5] CAD/CAM/CAE技術聯盟. SolidWorks 2016中文版機械設計從入門到精通[D]. 北京: 清華大學出版社, 2017: 19-54.
[6] 盧大偉. 多傳感器數據融合方法在新型組合導航系統中的應用[D]. 南京: 東南大學, 2001.
[7] 曾慶華, 張為華. IMEMS 速率陀螺芯片在MAV飛行控制系統中應用研究[J]. 測控技術, 2004, 23(2).
[8] 張靜, 金志華. 空中平臺航姿參考系統的設計[J]. 中國慣性技術學報, 2004, 12(2): 47-52.
[9] 楊徽. 水下機器人通訊與控制技術研究[J]. 船科學技術期刊, 2015, 7(3): 17-21.
Research on Attitude Fusion Technique for Underwater ROV Control
Pei Guodong, Bian Zewu, Wen Yanan
(Qingdao Academy for Opto-electronics Engineering, Qingdao 266019, Shandong, China)
TP242
A
1003-4862(2019)01-0014-03
2018-07-26
青島市光電智庫聯合基金資助(GDZK-2017-16)
裴國棟(1991-),男,初級。研究方向:自動控制。E-mail: pei_guodong@foxmail.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
