基于MC9S12XS128單片機(jī)的管道內(nèi)鋼珠運(yùn)動(dòng)測(cè)量系統(tǒng)設(shè)計(jì)*
2019-02-14 09:45:02邵華
科技與創(chuàng)新 2019年2期
邵華
?
基于MC9S12XS128單片機(jī)的管道內(nèi)鋼珠運(yùn)動(dòng)測(cè)量系統(tǒng)設(shè)計(jì)*
邵華
(寧波城市職業(yè)技術(shù)學(xué)院 信息與智能工程學(xué)院,浙江 寧波 315100)
系統(tǒng)以單片機(jī)為核心控制模塊,采用電感式接近開(kāi)關(guān)為傳感器實(shí)現(xiàn)鋼珠數(shù)量、管道傾斜角度的測(cè)量。系統(tǒng)通過(guò)兩個(gè)傳感器各自測(cè)得的信號(hào)計(jì)算鋼珠數(shù)量,然后計(jì)算不同管道傾角下兩個(gè)傳感器所測(cè)得時(shí)間間隔△,通過(guò)數(shù)據(jù)擬合獲取了與△的冪函數(shù)關(guān)系,并由此函數(shù)關(guān)系計(jì)算該管道傾斜角度。實(shí)驗(yàn)證明,本系統(tǒng)能準(zhǔn)確獲得鋼珠數(shù)量、運(yùn)動(dòng)方向及管道傾斜角度。
MC9S12XS128;電感式傳感器;鋼珠檢測(cè);角度測(cè)量
管道內(nèi)鋼珠運(yùn)動(dòng)測(cè)量系統(tǒng)是球桿系統(tǒng)的一種,是一個(gè)不穩(wěn)定的開(kāi)環(huán)物理控制系統(tǒng)。在該類系統(tǒng)中存在非線性、多變量、時(shí)變性和自然不穩(wěn)定特性[1-3],受影響的因素比較多,因此被控系統(tǒng)的數(shù)學(xué)模型并不容易準(zhǔn)確建立。本文設(shè)計(jì)的管道內(nèi)鋼珠運(yùn)動(dòng)測(cè)量系統(tǒng)從實(shí)驗(yàn)數(shù)據(jù)角度出發(fā),通過(guò)對(duì)大量數(shù)據(jù)詳細(xì)分析與擬合,找出管道內(nèi)鋼珠運(yùn)動(dòng)系統(tǒng)中管道角度與鋼珠運(yùn)動(dòng)時(shí)間的基本函數(shù)關(guān)系,并以此函數(shù)關(guān)系來(lái)計(jì)算管道角度,滿足普通嵌入式系統(tǒng)實(shí)時(shí)獲得較好測(cè)量精度的要求。
1 系統(tǒng)設(shè)計(jì)原理分析
基于單片機(jī)的管道內(nèi)鋼珠運(yùn)動(dòng)測(cè)量系統(tǒng)設(shè)計(jì)以單片機(jī)為控制核心,通過(guò)2個(gè)非接觸式電感接近開(kāi)關(guān)檢測(cè)鋼珠運(yùn)動(dòng)。當(dāng)鋼珠通過(guò)接近開(kāi)關(guān)會(huì)產(chǎn)生脈沖信號(hào),獲取該脈沖信號(hào)數(shù)量,獲得通過(guò)鋼珠數(shù)量。將2個(gè)電感接近開(kāi)關(guān)分布于管道不同位置,檢測(cè)2個(gè)傳感器脈沖信號(hào)產(chǎn)生次序來(lái)判別鋼珠運(yùn)動(dòng)方向和運(yùn)行周期。同時(shí),檢測(cè)2個(gè)傳感器脈沖信號(hào)產(chǎn)生時(shí)間差來(lái)獲取管道的傾斜角度。管道內(nèi)鋼珠運(yùn)動(dòng)測(cè)量系統(tǒng)如圖1所示。
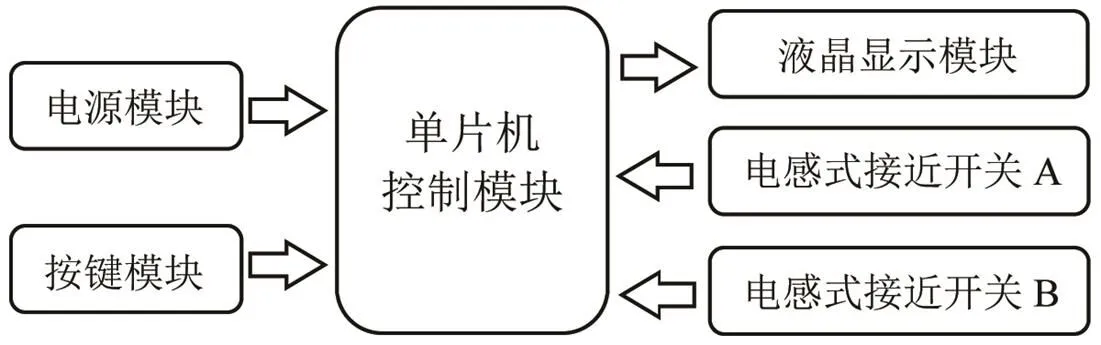
圖1 管道內(nèi)鋼珠運(yùn)動(dòng)測(cè)量系統(tǒng)框圖
1.1 鋼珠檢測(cè)原理分析
在本系統(tǒng)中,鋼珠檢測(cè)是通過(guò)電感式接近開(kāi)關(guān)來(lái)實(shí)現(xiàn)。電感式接近開(kāi)關(guān)是利用電渦流特性實(shí)現(xiàn)的傳感器,其由振蕩器、開(kāi)關(guān)電路及內(nèi)部放大輸出電路組成。振蕩器在傳感器感應(yīng)面的前方產(chǎn)生高頻交變電磁場(chǎng),當(dāng)所測(cè)量的金屬物體接近磁場(chǎng)產(chǎn)生渦流效應(yīng),導(dǎo)致振蕩電路信號(hào)減弱,同時(shí)通過(guò)其后置電路放大該振蕩變化并轉(zhuǎn)換為開(kāi)關(guān)輸出信號(hào)輸出,實(shí)現(xiàn)非接觸式金屬檢測(cè)[4]。
因此,鋼珠在管道內(nèi)滾動(dòng)通過(guò)電感式接近開(kāi)關(guān)位置時(shí),即可在三線制電感式接近開(kāi)關(guān)信號(hào)端送出一個(gè)脈沖信號(hào),通過(guò)單片機(jī)來(lái)捕獲該脈沖信號(hào)即可檢測(cè)到鋼珠。
1.2 鋼珠運(yùn)動(dòng)參數(shù)獲取分析
在本系統(tǒng)中需要獲取的運(yùn)動(dòng)參數(shù)分別為鋼珠數(shù)量、運(yùn)動(dòng)方向和管道傾斜角度。由于鋼珠滾動(dòng)通過(guò)電感式接近開(kāi)關(guān)位置時(shí),即可在接近開(kāi)關(guān)信號(hào)端送出一個(gè)脈沖信號(hào),捕獲該脈沖信號(hào)數(shù)量即為鋼珠數(shù)量。
在管道角度獲取過(guò)程中,系統(tǒng)通過(guò)檢測(cè)不同管道角度下2個(gè)傳感器所測(cè)得鋼珠時(shí)間間隔?α,通過(guò)在不同角度下及不同2個(gè)非接觸傳感器不同間距條件下進(jìn)行多次測(cè)量,對(duì)測(cè)量數(shù)據(jù)進(jìn)行分析擬合,獲得管道角度和時(shí)間間隔?α之間的函數(shù)關(guān)系,即:
=(?α). (1)
式(1)中:為系統(tǒng)參數(shù),與2個(gè)傳感器分別在管道上所處位置及相互距離相關(guān),當(dāng)傳感器在管道上所處位置及相互距離固定后,可獲取固定值。
通過(guò)測(cè)試實(shí)驗(yàn)結(jié)果驗(yàn)證分析,該函數(shù)滿足冪函數(shù)關(guān)系:
=(?α)-. (2)
式(2)中:、為系統(tǒng)參數(shù),與2個(gè)傳感器分別在管道上所處位置及相互距離相關(guān)。
2 系統(tǒng)硬件電路設(shè)計(jì)
本設(shè)計(jì)硬件模塊電路設(shè)計(jì),其核心控制模塊為MC9S12XS128單片機(jī)[5],主要應(yīng)用了該款單片機(jī)的TIM模塊對(duì)外部通道的邊沿信號(hào)進(jìn)行檢測(cè)。檢測(cè)系統(tǒng)以LJ12A3型電感接近開(kāi)關(guān)為檢測(cè)傳感器,在本系統(tǒng)中,該傳感器用于檢測(cè)鋼珠信號(hào),當(dāng)鋼珠通過(guò)該傳感器時(shí),會(huì)產(chǎn)生一個(gè)脈沖信號(hào),用以啟動(dòng)或停止MC9S12XS128單片機(jī)定時(shí)器,再由單片機(jī)記錄中斷時(shí)間和次數(shù),并算出鋼珠數(shù)量、角度等信息。
3 系統(tǒng)測(cè)試及結(jié)果分析
3.1 鋼珠數(shù)量檢測(cè)
系統(tǒng)由A端放入 2~10 粒鋼珠,每粒鋼珠放入的時(shí)間間隔小于等于2 s,測(cè)試裝置顯示放入鋼珠個(gè)數(shù)。測(cè)試數(shù)據(jù)如表1所示。結(jié)果表明該系統(tǒng)滿足要求。
表1 鋼珠數(shù)量顯示測(cè)試結(jié)果(單位:粒)
序號(hào)放入鋼珠數(shù)量測(cè)得鋼珠數(shù)量 133 266 388 499 51010
3.2 管道傾斜角度測(cè)試
設(shè)定傳感器A和B之間距離為100 mm,當(dāng)管道傾斜角為10o~80o之間的某一角度,由A端放入1粒鋼珠,測(cè)量?jī)A斜角的角度值,其測(cè)試數(shù)據(jù)如表2所示。
表2 傳感器間距100 mm管道傾斜角度測(cè)試結(jié)果
序號(hào)量角器角度/°傳感器檢測(cè)時(shí)間間隔/(1/25 000 s)測(cè)得角度/°絕對(duì)誤差/° 11046 789100 21537 292150 32031 766200 42528 084250 53025 204300 63523 882350 74021 697400 84520 312450 95018 872500 105518 095541 116017 244611 126516 351641 137015 909700 147515 417732 158015 049811
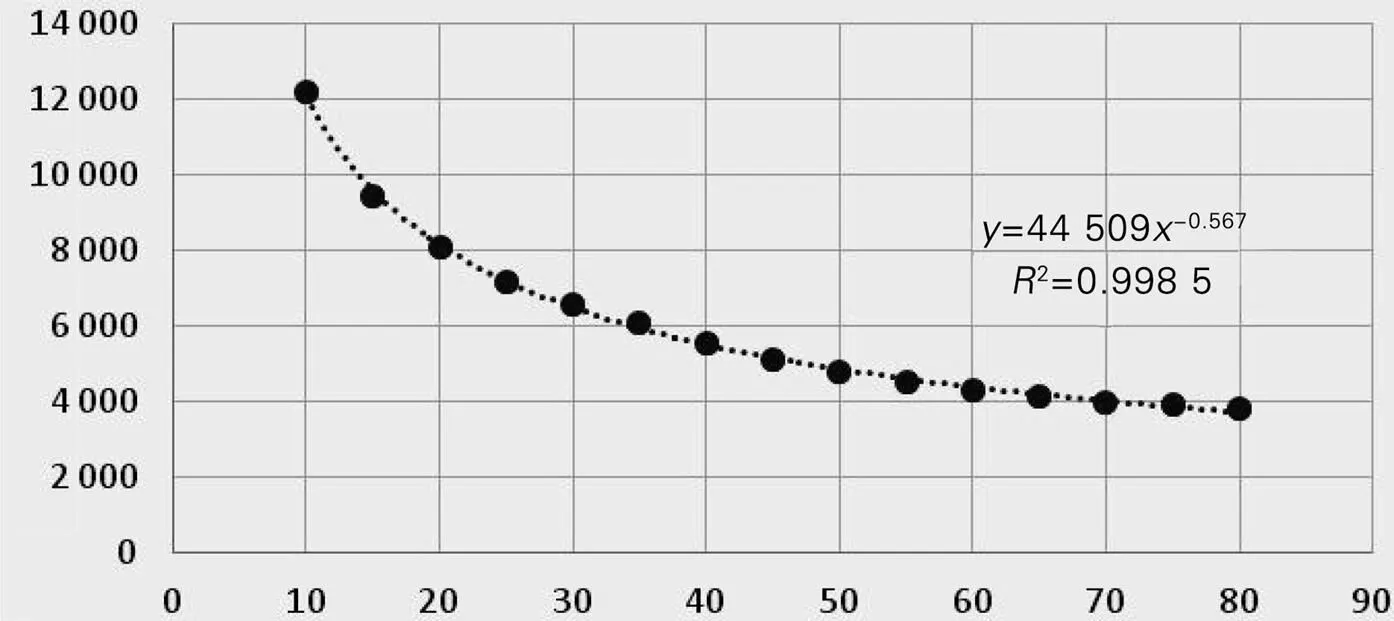
圖2 兩個(gè)傳感器檢測(cè)時(shí)間間隔與管道角度曲線圖
該系統(tǒng)在角度較大時(shí)測(cè)量誤差略大于角度小時(shí),最大絕對(duì)誤差為2°。對(duì)傳感器檢測(cè)時(shí)間間隔與角度數(shù)據(jù)進(jìn)行函數(shù)擬合,其曲線如圖2所示。
4 結(jié)束語(yǔ)
本系統(tǒng)設(shè)計(jì)的管道內(nèi)鋼珠運(yùn)動(dòng)測(cè)量裝置,通過(guò)非接觸傳感器檢測(cè)鋼珠運(yùn)動(dòng),配合信號(hào)處理與顯示電路獲得鋼珠個(gè)數(shù)、運(yùn)動(dòng)方向、管道傾角等的運(yùn)動(dòng)參數(shù),同時(shí)得出管道傾角與傳感器檢測(cè)時(shí)間間隔間存在著冪函數(shù)關(guān)系。
[1]孫亭玉.鋼珠分檢控制系統(tǒng)設(shè)計(jì)[D].長(zhǎng)春:長(zhǎng)春理工大學(xué),2013.
[2]張桂紅.基于IAP15W4K58S4單片機(jī)管道內(nèi)鋼珠運(yùn)動(dòng)測(cè)量系統(tǒng)的設(shè)計(jì)[J].無(wú)線互聯(lián)科技,2017(22):71-72.
[3]承浩,朱佳威,姜康佳.一種內(nèi)置鋼珠的塑料管道傾角的測(cè)量方法[J].沙洲職業(yè)工學(xué)院學(xué)報(bào),2017(3):1-6.
[4]吳良孟.改進(jìn)型電感式接近開(kāi)關(guān)的設(shè)計(jì)及應(yīng)用[J].長(zhǎng)三角,2009(7):147-150.
[5]王貴山,劉亞茹.基于XS128單片機(jī)的多功能測(cè)量系統(tǒng)設(shè)計(jì)[J].河南科技,2013(22):92-94.
邵華(1979—),男,浙江杭州人,副教授,工程師,研究方向?yàn)樾盘?hào)采集與處理。
浙江省教育廳2016年度高校科研項(xiàng)目(編號(hào):Y201635391);寧波城市職業(yè)技術(shù)學(xué)院科研項(xiàng)目(編號(hào):ZZX17107)
2095-6835(2019)02-0108-02
TH122
A
10.15913/j.cnki.kjycx.2019.02.108
〔編輯:嚴(yán)麗琴〕
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21