基于單片機的智能風(fēng)動力尋跡小車
2019-02-14 08:51:20高文博
電子制作 2019年2期
高文博
(山東諸城繁華中學(xué),山東諸城,262200)
0 引言
智能車內(nèi)部設(shè)有的綜合系統(tǒng)能夠進行自動控制,是現(xiàn)代科學(xué)成果中的一項高新技術(shù)綜合體。本文中論述的智能風(fēng)動力尋跡小車的設(shè)計研究中,采用瑞薩32位單片機R8C/38A作為智能車的控制核心,采用閉環(huán)PID控制以及紅外線傳感器等技術(shù),實現(xiàn)對路線的自動識別控制,通過控制舵機開環(huán)比例,讓模型車能夠自主尋跡行駛。
1 單片機的智能風(fēng)動力尋跡小車總體設(shè)計方案
■1.1 單片機的智能風(fēng)動力尋跡小車系統(tǒng)設(shè)計
單片機的智能風(fēng)力尋跡小車系統(tǒng)設(shè)計中,將單片機控制模塊、路徑識別模塊、電機驅(qū)動模塊、通信及調(diào)試模塊等模塊組成MCU智能車系統(tǒng),其中,控制模塊利用瑞薩單片機R8C/38A進行核心控制,采用八個紅外傳感器構(gòu)成路徑識別模塊進行路況信息采集,并將所采集到的信息輸送至單片機內(nèi)進行信號分析處理,處理完成后發(fā)出PWM波,對轉(zhuǎn)向舵機以及驅(qū)動電機進行分別控制,這一控制能夠?qū)崿F(xiàn)智能車的基本行進運動。模型車的車架后方裝有OMRON E6A2-CS3E/200P旋轉(zhuǎn)編碼器采集車輪轉(zhuǎn)速,通過該裝置可更加精準(zhǔn)的對模型車車速進行精準(zhǔn)控制,由控制單元進行脈沖信號的接收處理工作,并通過PID控制算法計算出PWM占空比,能夠提升智能車的車速,并進行精準(zhǔn)控制。采用四輪驅(qū)動以及無線收發(fā)模塊,加裝LED指示燈。圖1為模型車控制系統(tǒng)結(jié)構(gòu)示意圖。
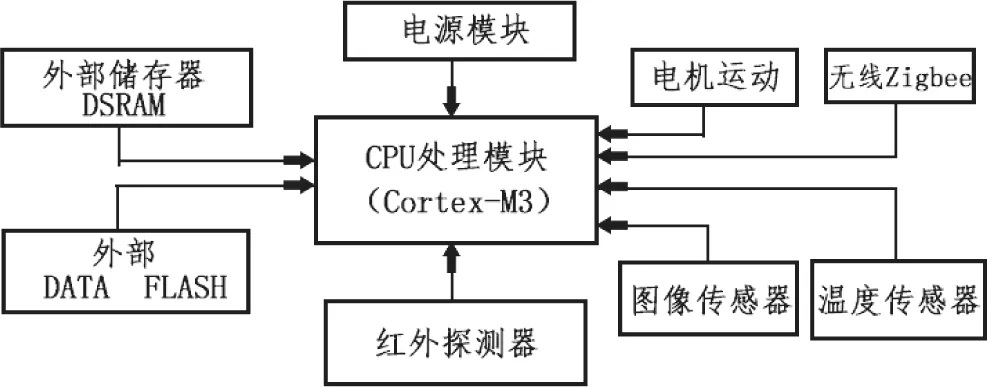
圖1 模型車控制系統(tǒng)結(jié)構(gòu)示意圖
■1.2 單片機的智能風(fēng)動力尋跡小車的電源模板設(shè)計
單片機的智能風(fēng)動力尋跡小車電源設(shè)計中,采用八塊5號2000 mAh充電電池進行供電,電池可進行充電,滿足模型車斷電狀態(tài)下的工作需要。在單片機的智能風(fēng)動力尋跡小車電源模塊設(shè)計中,滿足自行調(diào)節(jié)電壓的電源模塊設(shè)置,驅(qū)動電路能夠直接對電機進行供電,單片機的智能風(fēng)動力尋跡小車運行電壓在4.8~6 V的范圍區(qū)間,通過對單片機的智能風(fēng)動力尋跡小車電源模板的設(shè)計,能夠?qū)崿F(xiàn)模型車的電能供應(yīng),蓄電電池可作為模型車的主要動力來源,單片機的智能風(fēng)動力尋跡小車能夠?qū)㈦娔芰己棉D(zhuǎn)化。
■1.3 單片機的智能風(fēng)動力尋跡小車的路徑控制
在對單片機的智能風(fēng)動力尋跡小車進行路徑識別模塊的設(shè)計時,采用八組紅外線傳感器組成整套傳感器板。首先設(shè)置一組紅外線傳感器進行閘門的檢測,通過該項傳感器控制閘門的開關(guān),控制智能車是否啟動。余下七組紅外線傳感器皆用于進行路徑檢測工作。傳感器進行路況感應(yīng),并將路況信息傳達(dá)到單片機,對模型車行使的速度與轉(zhuǎn)向舵機轉(zhuǎn)動角度進行智能控制,安裝紅外線發(fā)光二極管TLN119作為白色發(fā)射光線,而發(fā)射在賽道的為紅外線;安裝光傳感器S7136作為黑色吸收光線。當(dāng)有光線被反射到其接受面上時,則轉(zhuǎn)化數(shù)字信息“1”輸出到單片機,證明有光線被反射到其接受面上,反之則證明沒有光線被反射到其接受面上。單片機的智能風(fēng)動力尋跡小車采用單片機PWM信號進行電機驅(qū)動,在這一設(shè)計中利用脈寬控制進行驅(qū)動信息處理,保證對模擬量的電壓處理的簡便性,利用CPU能夠更好的處理數(shù)字量“1”和“0”,能夠?qū)ζ溥M行有利控制。在模型車頂端安裝有一個螺旋槳,通過遇風(fēng)情況下螺旋槳的高速旋轉(zhuǎn),能夠使風(fēng)能轉(zhuǎn)化成為電能,作為部分能源供應(yīng)。與此同時,模型車 H橋電路能夠?qū)崿F(xiàn)電機的旋轉(zhuǎn)以及速度控制,將電機設(shè)置在電橋的中心位置,在電機兩側(cè)分別設(shè)置四個場效應(yīng)管,將之構(gòu)成一個H形橋,通過改變H形橋的位置形狀,改變四個場效應(yīng)管的狀態(tài),便能夠進行對電機的正、反轉(zhuǎn)控制[1]。
2 基于單片機的智能風(fēng)動力尋跡小車研究
■2.1 模型車控制系統(tǒng)研究分析
模型車控制系統(tǒng)中的控制模塊主要運用瑞薩32位單片機R8C/38A作為CPU板。將HEW軟件作為編譯軟件。HEW軟件是利用嵌入式系統(tǒng)設(shè)計而成,該設(shè)計作為后臺系統(tǒng),能夠保證整個應(yīng)用程序的循環(huán)作用,利用循環(huán)作用中的函數(shù)規(guī)律完成相應(yīng)指示。通過HEW軟件進行工程窗口、編輯窗口等內(nèi)容的設(shè)置,工程建立完成后通過編譯與修改,從而生成二進制目標(biāo)文件,而后利用 fl ash 編譯工具固化至單片機的Flashrom中。程序服務(wù)的中斷級可以處理在正常工作時遇到的異常事件,此項操作的處理時間的相關(guān)性很強,也是作為系統(tǒng)處理中一項關(guān)鍵操作。前后臺系統(tǒng)在實際應(yīng)用中占據(jù)優(yōu)勢,系統(tǒng)成本低且任務(wù)較為單一,具有執(zhí)行效率高且資源分配靈活的顯著優(yōu)勢。在此基礎(chǔ)上,除了對模型車設(shè)置了緊湊的硬件資源,還配備了模式切換、信號處理、信號采樣等等附加功能,滿足模型車的基本工作需要。模型車控制系統(tǒng)主要利用C語言進行編程,這一技術(shù)具有匯編功能強、信號處理能力強以及靈活性強的特點,容易移植。在對智能車進行方向控制時,利用單片機發(fā)出的PWM信號傳輸至舵機,對舵機轉(zhuǎn)向角度進行控制。對模型車進行方向控制時應(yīng)綜合考慮,選取控制簡單安全、且一旦出現(xiàn)偏差能夠及時挽回的比例控制技術(shù)[2]。
■2.2 模型車速度控制研究分析
對模型車速度控制的研究分析可知,為實現(xiàn)模型車能夠快速且平穩(wěn)的在賽道上行使,則需利用電能作為源動力,采用四個直流電機對模型車的四輪進行驅(qū)動,在進行初期調(diào)試時,測出模型車的平均速度超出2.2m/s,一旦模型車的四輪同時進行直流電機的驅(qū)動,則會嚴(yán)重影響轉(zhuǎn)向效果,所以應(yīng)把控好模型車的速度,采用合理差速控制策略。差速值的計算比較簡單,首先利用模型車的自身結(jié)構(gòu)以及賽道形式進行計算,得出每一個輪子的速度比,由此進行差速表的繪制。計算每一直流電機在實際輸出時的PWM占空比,保證每個輪子能夠在轉(zhuǎn)彎時進行不同速度的轉(zhuǎn)動。根據(jù)差數(shù)值的不同,大致可以分為三種:阿克曼式、中軸式、傳感器相關(guān)式[3]。本文中所研究的單片機智能風(fēng)動力尋跡小車模型采用的是中軸式差速值,智能車在進行轉(zhuǎn)向時先由前兩輪受到舵機控制,后兩輪不變動,始終保持同一軸心。一般來說,當(dāng)模型車處于行使時,先由內(nèi)部的紅外線傳感器進行賽道狀況的分析,將對賽道狀況的分析結(jié)果作為智能車是否加速或者減速的一句。采取一定策略,將控制程序中的模式進行轉(zhuǎn)化,使之變更為速度設(shè)定值模式,并利用閉環(huán)反饋系統(tǒng)的方法以及PID控制算法進行車速控制,其目的能夠使模型車保持穩(wěn)定行使,并在彎道轉(zhuǎn)彎時更好的控制車速,防止由于模型車轉(zhuǎn)彎不夠靈敏,造成沖出賽道等情況的發(fā)生。
■2.3 模型車設(shè)計方案檢測研究
模型車設(shè)計方案完成后,通過安裝操作將模型車組裝完整后,還需進行模型車的調(diào)試。首先,應(yīng)檢查供電電路是否正常供電、編碼器與傳感器是否能夠正常開啟。在進行電路檢測時,可利用萬用表對各組供電模塊進行電壓測試,通過測試結(jié)果查看電壓與供電是否正常。之后,使車輪處于懸空狀態(tài)并啟動模型車,查看電機驅(qū)動能否正常工作,傳感器的測試可將傳感器板放置在地面,以檢測傳感器的信號接收是否正常無阻,這一項檢測結(jié)束后便完成了模型車的基本靜態(tài)檢測。進行動態(tài)檢測時,應(yīng)將模型車放置到賽道上進行檢測,首先應(yīng)對不同賽道進行單獨的測試,綜合對模型車進行彎道、直道、換道等具有針對性的賽道測試,記錄在實際行駛過程中出現(xiàn)的問題,并對其進行相應(yīng)調(diào)整。直到模型車行使在賽道上能夠穩(wěn)定且快速的行駛過不同賽道,才能夠進行最后的整圈行使測試[4]。
3 結(jié)論
現(xiàn)階段,單片機智能風(fēng)動力循跡小車的應(yīng)用越來越廣泛,這項技術(shù)也在向著更加高速度化和高智能化的方向不斷邁進。上述單片機智能風(fēng)動力尋跡小車方案中,利用螺旋槳的高速旋轉(zhuǎn),能夠?qū)L(fēng)能轉(zhuǎn)化成為供應(yīng)能源,通過紅外線感應(yīng)等技術(shù),實現(xiàn)智能尋跡小車的快速行駛。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04
