推車SLAM室內實景三維測圖及應用
2019-02-15 05:06:26,,,,,,,,,
測繪通報 2019年1期
,,,,,, ,, ,
(1. 北京建筑大學測繪與城市空間信息學院,北京 102616; 2. 代表性建筑與古建筑數據庫教育部工程中心,北京 102616; 3. 北京未來城市設計高精尖創新中心,北京 100044; 4. 現代城市測繪國家測繪地理信息局重點實驗室,北京 102616; 5. 建筑遺產精細重構與健康監測北京市重點實驗室,北京 102616; 6. 南京天樞星圖信息技術有限公司,江蘇 南京 210042)
室內環境的高精度三維信息獲取類似于機器人在未知環境下進行定位和制圖,在機器人領域稱之為SLAM(simultaneous localization and mapping)[1]。室內測量可以借助推車SLAM技術來獲取室內空間數據,實現室內實景三維測圖,為室內導航定位提供數據基礎。人們可以通過推車SLAM掃描獲取三維信息(包括實景影像和點云數據),利用一定的技術手段制作出高精度的室內三維實景地圖。而這種類型的地圖,往往是基于三維實景影像與點云數據的融合原理制作而成,具有高保真度,能顯示多細節信息。相比于傳統的三維激光掃描儀只能單一獲取三維點云數據,再通過第三方設備拍攝若干圖像后進行紋理貼圖和建模,推車SLAM系統的一體化數據處理過程可明顯減弱人工貼圖誤差的影響,輸出的三維地圖精度更高,應用價值和前景更廣。
1 相關研究現狀
中海達HiScan-SLAM憑借其靈活、機動的特性,基于LiDAR的SLAM技術,能夠快速、實時、精準地獲取室內環境的三維激光點云、全景影像和行駛軌跡,為室內定位、室內二三維地圖和三維模型生產提供數據支持[1];華泰天宇IMS3D室內三維移動掃描儀測量速度快,精度高,應用范圍廣及完美的專業適應性,為快速實時獲取室內高精度三維空間信息提供了新手段[2];室內移動測繪系統(i-MMS)[3]與室內多傳感器采集系統(IMAS)[4]的出現緩解了典型移動式激光雷達掃描系統(MLS)等對于GPS的依賴,為室內空間數據的獲取與導航定位提供了技術支持。但這些新型的推車SLAM系統仍然處于早期發展階段,對于一些有超高精度要求的應用,如需要毫米級精度的測量工程和監測等,這類系統目前仍無法充分發揮作用(見表1)。針對以上各種推車SLAM的特點和不足,本文重點介紹在以上各方面都表現出優勢的SLAM移動測圖系統NavVis,詳細介紹基于NavVis的從數據采集、數據處理、網絡發布到地圖應用的一整套室內實景三維測圖服務系統解決方案。
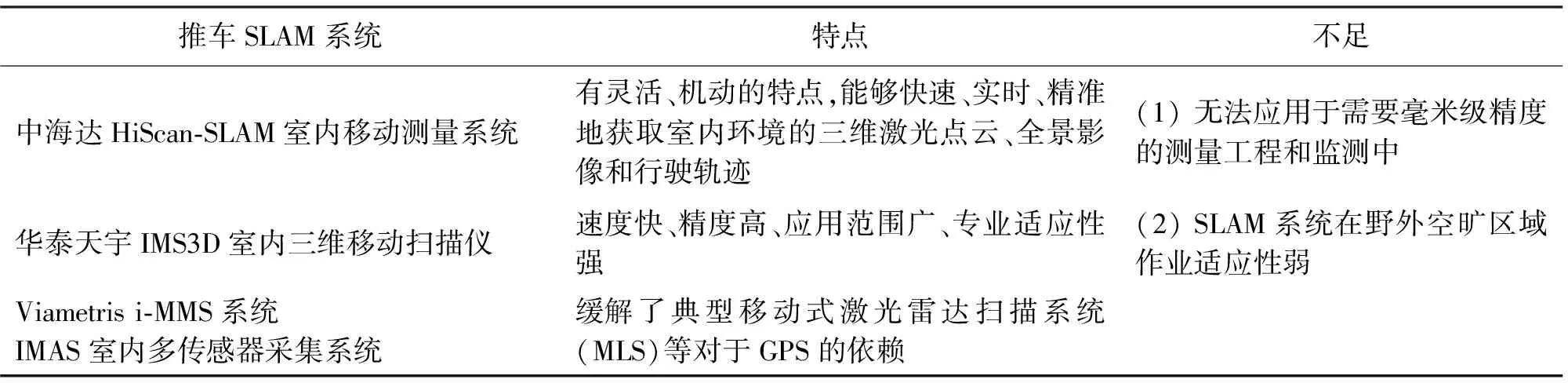
表1 推車SLAM系統的對比
2 NavVis室內實景三維測圖原理
本文采用NavVis M3室內移動測量車作為數據獲取手段,該推車為德國NavVis公司自主研發的以SLAM技術為基礎的室內移動測量系統,可以快速完成對目標建筑的室內三維結構、720°全景、WiFi、地磁等信息的采集,現場測量完成后通過專業軟件對掃描數據進行處理并完成信息模型構建,可以制作室內三維實景地圖。從模型中可直接獲得目標建筑的二維平面圖和反映室內三維結構的點云數據,該點云數據可用于建模或相關性分析[5]。
NavVis M3室內移動測量車配有精密的儀器設備(如圖1所示),包括6臺高分辨率全景相機、1臺水平激光掃描儀、2臺垂直激光掃描儀、1臺觸屏控制器和穩定輕量的行走平臺等。通過各部件的協調工作,可以生成有全沉浸式VR互動的360°全景圖,可支持輸出LAS、PLY格式且兼容CAD系統的5 mm精度三維點云,支持自由添加文字、聲音、視頻等標注信息的高精度二維平面圖,功能十分強大。
在NavVis M3室內移動測量車的結構中,6臺照相機上裝有魚眼鏡頭,像素達到1600萬,可以捕捉720°全景照片。在掃描過程中分別生成6張照片,并在后期處理時拼接在一起;1臺水平激光掃描儀為即時定位與地圖構建設備,M3移動掃描系統在創建地圖時,運用位置算法對自身進行定位,定位所需數據來自水平激光掃描儀。該激光掃描儀在1.88 m的高度連續掃描,并依此獲取定位和地圖構建所需數據;2臺垂直激光掃描儀安裝在移動測量系統車身前方,垂直激光儀的盲點指向地面,這樣移動掃描系統的任何一部分都不會處于激光儀的掃描范圍之內。以上3臺激光掃描儀中每臺都可以捕捉30 m內270°范圍內的景象。它們的放置方式保證了房間的三維空間均可被覆蓋。在掃描過程中激光數據被連續記錄,并生成三維點云數據;1臺觸屏控制器可以完成一鍵測圖與采集工作,操作簡單且實時顯示掃描范圍、測量點位與二維預覽圖[6]。
3 技術流程
3.1 數據采集
本文試驗測量范圍是北京建筑大學測繪學院樓。在掃描工作開始前,首先要對掃描路線作簡單的路線規劃,應根據測繪學院樓建筑平面圖,把整個建筑物的室內劃分成若干個掃描區,要充分考慮掃描重疊度、單次掃描時間限制、建筑物尺寸與建筑布局等影響因素,以防止不必要的復測。
為提高地圖創建的精度,掃描時需建立數據集的閉合環[7],即在大型地圖中,在一個數據集內重復經過已掃描區域而形成的閉合路線。本文在掃描測繪學院樓每層樓道時,將移動掃描系統使其路徑多次經過同一點,與先前走過的路線交叉,確保捕捉到已知環境,并識別出重要幾何圖像,以此生成精準正確的地圖。掃描路徑和二維柵格地圖展示在觸屏控制器上,如圖2所示,路徑上的點為圖像拍攝位置點,間隔為1 m,推車行進速度不超過6 m/s,推車每行進1 m系統發出響聲,此時等待設備進行拍攝,拍攝完成后再繼續行進,依此方法按規劃路線進行掃描。從圖中可以看出,掃描路徑上有很多交叉點與閉合環,有效地提高了測圖精度。
3.2 數據處理
NavVis M3室內移動測量車能夠捕獲大量數據,包括激光掃描儀數據及高清魚眼影像。為了從獲取的數據中生成三維實景地圖,需要在高效無縫運行NavVis軟件的計算機上進行數據處理[8]。使用64位Ubuntu 14.04操作系統,在該硬件設備上處理NavVis數據。首先需要對原始數據、發布數據與網絡數據作預處理,然后在IndoorViewer中對凌亂的原始點云數據作配準,其中包括數據單元的相對配準與全球配準兩部分,接著在NavVis系統中創建導航圖與云地圖,為后續室內路徑導航作鋪墊,最后將處理好的數據上傳至網絡端并發布。數據處理流程如圖3所示。
3.2.1 數據預處理
數據預處理過程主要分為3部分:原始數據預處理、發布數據預處理和網絡數據預處理。該過程所需時間是數據采集時間的2~3倍。數據預處理的目的是將掃描實景上傳至NavVis IndoorViewer中。IndoorViewer是一個在NavVis系統下基于瀏覽器端擁有直觀用戶界面的應用程序。原始數據的預處理是對所記錄的數據集啟動動態對象刪除的后期處理過程,可以刪除測量過程中移動的對象,即走動的人們。發布數據和網絡數據的預處理是針對當前項目創建一個實例,并將掃描的數據單元加載到實例中。最后,對實例進行注冊并登錄后,IndoorViewer界面就會顯示諸多管理圖標,點擊管理設置,就會顯示當前實例的實際面積屬性。
3.2.2 點云配準
點云配準過程需在IndoorViewer中完成,目的是使點云數據集進行相互匹配和關聯,以形成樓層與樓層之間、室內與室外之間、自身地理位置與全球地圖之間正確的位置關聯關系。點云配準包含兩部分內容:數據單元的相對配準和全球配準[9]。
3.2.2.1 數據單元的相對配準
在數據單元的相對配準過程中,利用Transform菜單中的角度旋轉與軸向平移選項,結合左側4幅視圖影像進行精確點云配準。為了方便識別特征,提高配準精度,本文以測繪學院每層樓的電梯井和樓梯作為參考進行配準拼接,不同的數據單元用不同的顏色加以區分,并仔細核對頂視圖中每層的投影重疊度,通過認真檢校與對比,完成測繪學院樓各數據單元的相對配準工作(如圖4所示)。由于不同操作者的局限性,該點云配準的相對精度會有差異,但總體絕對精度可以保證。
3.2.2.2 全球配準
與數據單元的相對配準類似,全球配準是基于OSM(open street map)的一種地理位置配準,主要目的是將數據集所在位置定位到全球坐標系,為后續生成導航圖與云地圖作鋪墊,但由于OSM的精細化程度不高,需要借助谷歌地圖等第三方平臺進行輔助定位[10]。配準過程中,需要依據谷歌地圖進行對比參照,將之前已完成相對配準的數據單元集拖拽至OSM的相應地理位置即可(如圖5所示)。由于不同操作者的局限性,全球配準的精度會有很大差異,這也是NavVis系統需要優化的一個重要問題。
3.2.3 創建導航圖與云地圖
導航圖顯示了到達一個位置可能的路徑網絡,為后續的導航路徑規劃提供基礎;云地圖是掃描區域的2D小地圖,展示在網頁端的右下角。二者的創建是整個數據處理過程中必不可少的一部分,需要利用點云配準已保存的配準參數文件來創建導航圖與云地圖[11]。首先,調用之前已保存的配準參數文件創建導航云地圖,此時會生成一個記錄了導航圖與云地圖信息的文件夾。然后,重新加載導航圖與云地圖的數據單元,并清空實例中原有數據,用之前最新生成的配準參數文件重新加載。導航圖與云地圖的創建結果如圖6、圖7所示。
3.3 數據發布
在完成導航圖與云地圖創建后,需上傳數據到網絡服務器,并創建IndoorViewer實例來發布數據,室內三維實景地圖的網絡發布成果如圖8所示。通過點擊地面位置點移動視角,動態瀏覽室內實景影像[12]。
4 應 用
4.1 興趣點(POI)添加查詢
POI在地理信息系統中起著極為重要的作用,它包含了名稱、類別、坐標、分類等豐富的信息,三維實景地圖中POI的多少直接影響導航的準確程度。
室內三維實景地圖可以實現興趣點的添加查詢功能。在IndoorViewer實景地圖中的目標位置單擊鼠標右鍵,選擇“創建興趣點”,在信息面板上即可編輯興趣點信息,為室內某處電梯的興趣點編輯面板,用戶可以上傳任何媒體形式的信息到興趣點中。在文本窗口中,通過“添加文件”按鈕,可以從電腦資源中選擇上傳圖片、PDF文件或音頻等文件。同時,在選擇條中選擇相應圖標即可嵌入圖片鏈接、音頻或視頻數據等資源。另外,點擊“源代碼”按鈕,即可將HTML代碼直接嵌入興趣點中。在興趣點高級功能部分,根據經緯度信息的可見和可編輯行,全球定位被劃分為低、中、高3個重要級別。這個級別決定了在地圖縮放或興趣點過多時,哪些興趣點最先消失。另外,興趣點的圖標也可以進行定制。
圖9所示為中國礦業大學環境與測繪學院的興趣點添加查詢結果,本文添加查詢的興趣點是一個消防箱,左上角顯示了該消防箱的屬性信息:位于中國礦業大學環境與測繪學院的一層。右下角的云地圖中也顯示了該消防箱所在的平面位置,其中該興趣點的圖標為特別定制。
4.2 室內導航路徑規劃
添加興趣點之后,可以利用IndoorViewer軟件在各興趣點之間實現虛擬路徑規劃。該功能實現的基礎是由NavVis軟件數據處理而自動生成的導航圖[13]。
首先需要在IndoorViewer中完善自動生成的導航圖。通過編輯及連接相關的導航結點,如樓梯或電梯等,可以關聯不同的樓層,錯誤的導航結點和關聯會導致不正確的路徑規劃(如圖10所示),需要手動刪除。經過多次測試不同的路徑規劃以確認路徑計算及導航邏輯的正確性。
在使用NavVis門戶端口建立實例時,直接激活IndoorViewer的附加模塊,其中會有路徑規劃功能。在中國礦業大學環境與測繪學院的實例中,路線規劃功能激活后,每一個興趣點面板都有“路徑規劃”選項。調出相應的興趣點面板,保持路徑規劃面板打開,點擊“路徑規劃”選項,選擇相應的“起點”或“終點”。系統會根據導航結點網絡自動計算并生成規劃路徑和相關導航信息。
圖11所示為中國礦業大學環境與測繪學院的一條室內導航路徑規劃,本文把導航的起點和終點分別設置為C107教室和消火栓,這兩個地點都為事先添加并編輯完成的興趣點。系統根據導航結點網絡自動計算并生成規劃路徑和相關導航信息,可以看到三維實景影像地圖中用依次關聯的方向箭頭來表示導航路徑,左上角的路徑規劃面板上清晰展現了兩個興趣點之間的距離及步行所需時間。同時,右下角的二維平面圖中也顯示了導航路徑,給用戶以更加直觀的二三維聯動式交互體驗。
5 結 語
隨著測繪科技的不斷進步,室內外測量技術的發展日新月異,以推車作為搭載平臺,以SLAM作為核心技術的移動測量系統層出不窮,它們的共同點基本都是不依賴GPS和IMU慣導系統,集SLAM、激光掃描儀、高分辨率相機為一體,完成自主定位與三維實景測圖工作[14]。相比傳統三維激光掃描儀,其數據采集精度高,速度快。NavVis推車SLAM作為典型代表之一,其室內實景三維測圖技術正日趨成熟,其最大的特點是提供了從數據采集、數據處理、網絡發布到地圖應用的一整套解決方案。其技術若推廣到汽車輔助駕駛或自動駕駛領域,服務于高精度地圖數據獲取與制作,應會有更廣闊的發展空間和應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中國公共安全(2017年7期)2017-10-13 08:18:11
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年9期)2017-04-17 03:01:00